I originally was going to look into can, but there is a simpler way… all deere, cnh, and cat tractors made in the last 15 years come with a scraper interface… basically you plug and play. DAC 8000 Wired - Manuals
Not sure of the wiring for cnh or cat but here is the configuration of deere
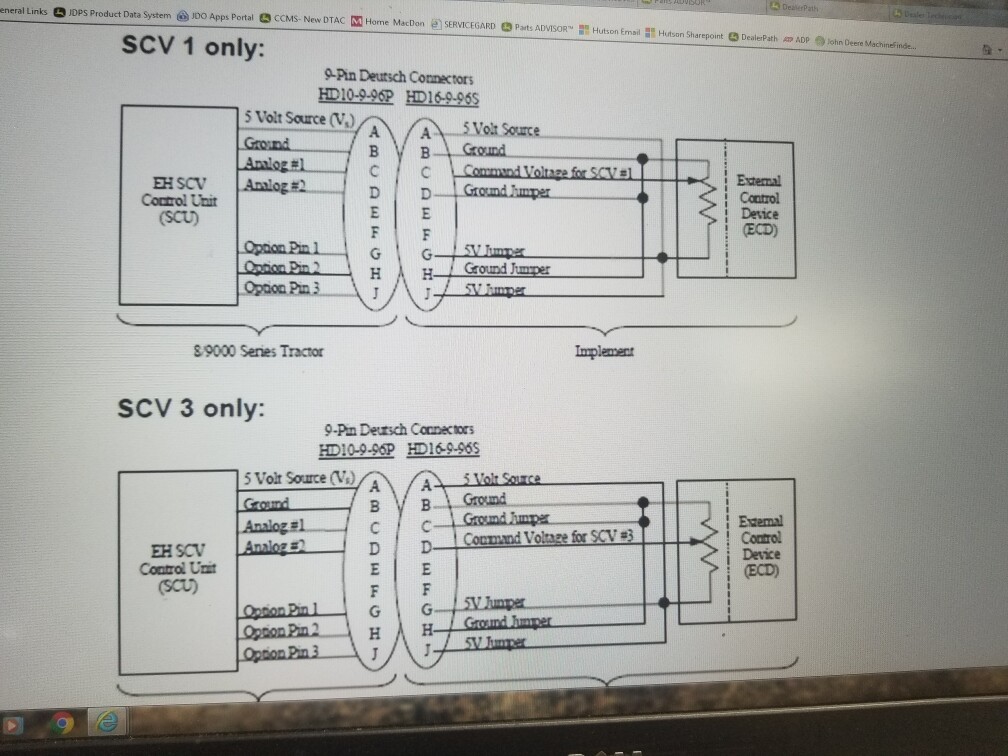
It is a 5v analog input that doesn’t like extremes. So 0-2.5v controls one direction and 2.5-5 controls another…
CNH and JD have a dead band from ~2.25 – 2.75 volts, this varies some from tractor to tractor.
CNH and JD will through error codes if the voltage sent < .5 or > 4.5.