Hi Sorry for my English but I live in Poland and I’m learning the language.
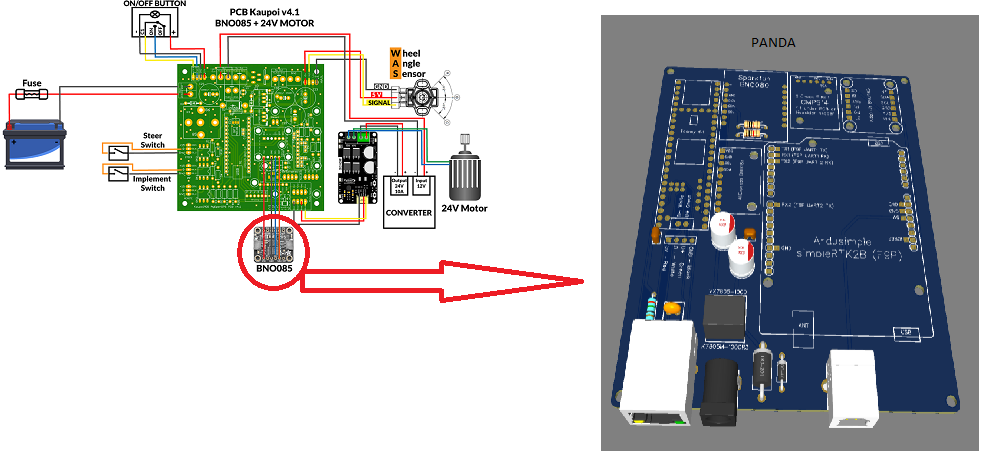
I am new to the topic of AGO. I want to build autosteer Single GPS + panda + IMU. I order pcb on Pcbway. I chose KaupoiMOD_4 and PCB_PANDA. Have I chosen correctly? There is room for BNO at KaupoMOD but BNO it will be on pcb panda. what if it doesn’t BNO on pcb KaupoMOD? Will it work properly? Will it be good?
Hello, the purpose of the Panda card is to make the gps and imu data more stable and synchronized and transfer this information to the routing card (kaupoi or v2), that is, the imu will not be inserted into the kaupoi card, the imu will be on the Panda card.
1 Like
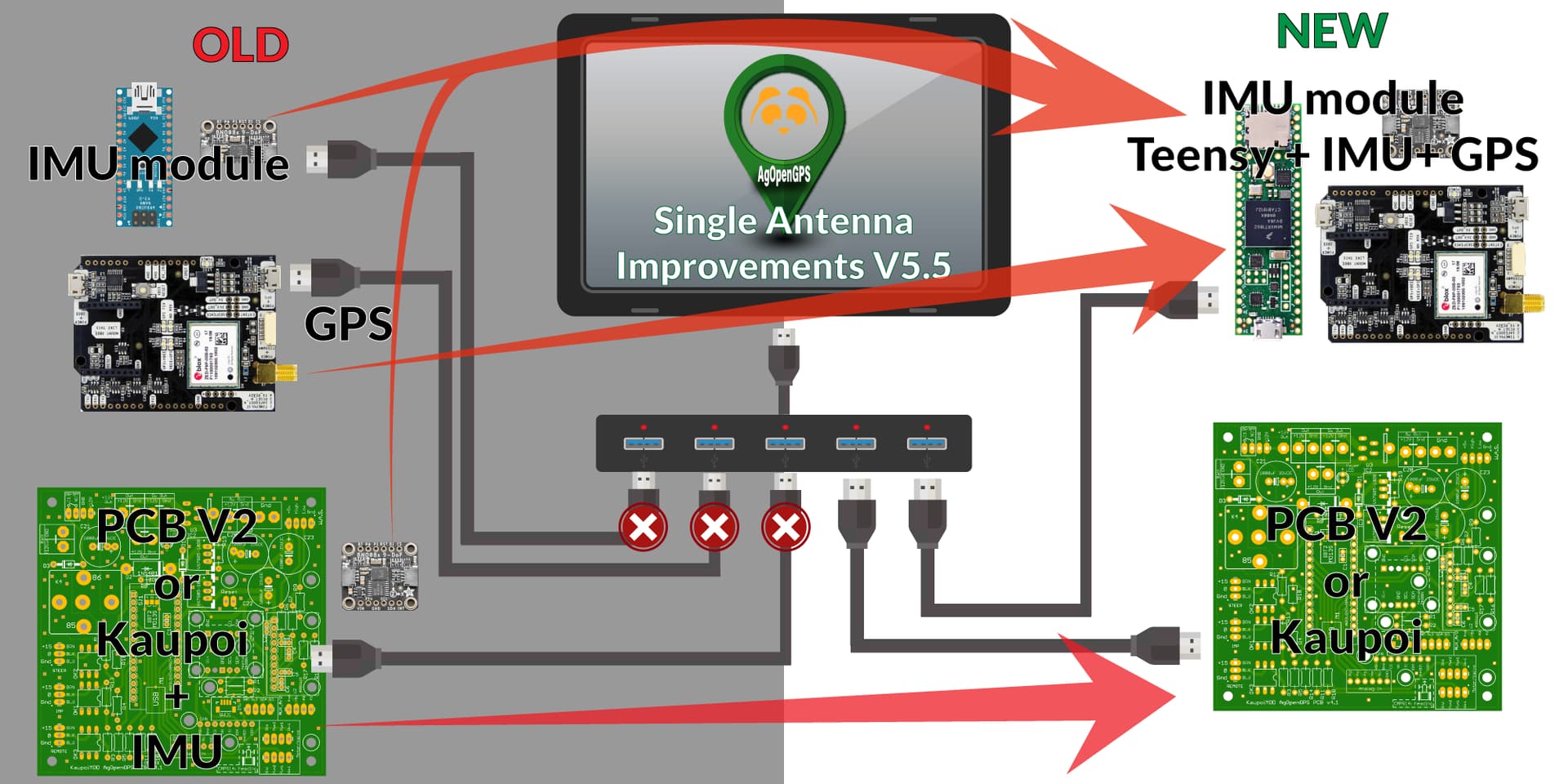
There is also a new Teensy all in one autosteer PCB almost ready to be released. You should find it mentioned on the forum. If you’re not in a rush then I’d wait a bit. You’ll be able to order this PCB from jlcpcb with most of the small parts already soldered.
2 Likes
Would it be safe to go ahead and order the larger parts such as teensy, IMU, GPS?
It would be safe to order a Teensy.
It would be safe to order a BNO085, if you can find one in stock somehere. Adafruit had ~250 in stock last week and they sold out in hours. You can sign up for email stock notification: Adafruit 9-DOF Orientation IMU Fusion Breakout - BNO085 (BNO080) [STEMMA QT / Qwiic] : ID 4754 : $24.95 : Adafruit Industries, Unique & fun DIY electronics and kits
It would be safe to order an F9P receiver and antenna. You should know that there is a new F9P board from ardusimple called the F9P micro. Its the same important F9P chip, but on a much smaller board. The “new Teensy all in one autosteer PCB almost ready to be released” board mentioned above will also come in version that uses the F9P micro instead of the full size version. Its the same circuit, same performance, close to the same cost, just smaller. Up to you if that interests you.
3 Likes
Which firmware we should use in above configuration?
for PCB V2 or Kaupoi:
Autosteer_UDP_v5_6
for Teensy+IMU+GPS
Autosteer_gps_teensy_v5_5 ? (Autosteer.ino and AutosteerPID.ino would be useless?)
Is it only UDP or is also USB version still availiable?
I am testing last beta version, and i still using USB.
You must use the ino included in the used version of AOG
What type of RF connector do you suggest: sma or ufl?
And should I use surface mount or through hole you think?
Ok, the code managed that with autosteer or GPS only.
Just a question regarding baudrate for GPS

Do you see a problem from your side if I set the GPS Baudrate to 460800 instead of 115200?
The reason is C099f9p needs 460800 UART1 speed for correct bluetooth operation. So I would be able to switch between Panda-UDP-Mode and Bluetooth-Mode by selector switch without any modifcation via u-center.
On the table panda system running with UART1 460800 Baud.
edit: Works also on the tractor, I think it’s only a problem, if there a longer wires, but with 10cm not a issue.
Can you describe what you uploaded to teensy 4.1 and what to arduino? UBS
I’m at this stage and have absolutely no idea
No problems have had them all set to 460800 as soon as I could get basic PANDA together, the faster the data can fly the faster it can be processed by the next device.
But now the GPS working over UDP so the F9P GPS data is going 921600 to an Ethernet adapter, The teensy is currently max 460800 in documentation, handled easily by the 600mhz processor, but in the pjrc forum they have been running the UART up to 6M (6000000). The Uart1 max on the F9P max is 921600.
Why buy a race car and only drive in first gear?

6 Likes
Open the support folder:
To Arduino Nano V3:
Support\ArduinoModules\UDP\Autosteer_UDP_v5_6
→ Download Autosteer_UDP_v5_6.ino
To Teensy:
Support\Basic Panda GPS\Firmware\Autosteer_gps_teensy_v5_5:
→ Download Autosteer_gps_teensy_v5_5.ino
1 Like
Thank you very much! I have one more question. After buying F9P it needs to be configured?
1 Like
mira este hilo en el foro