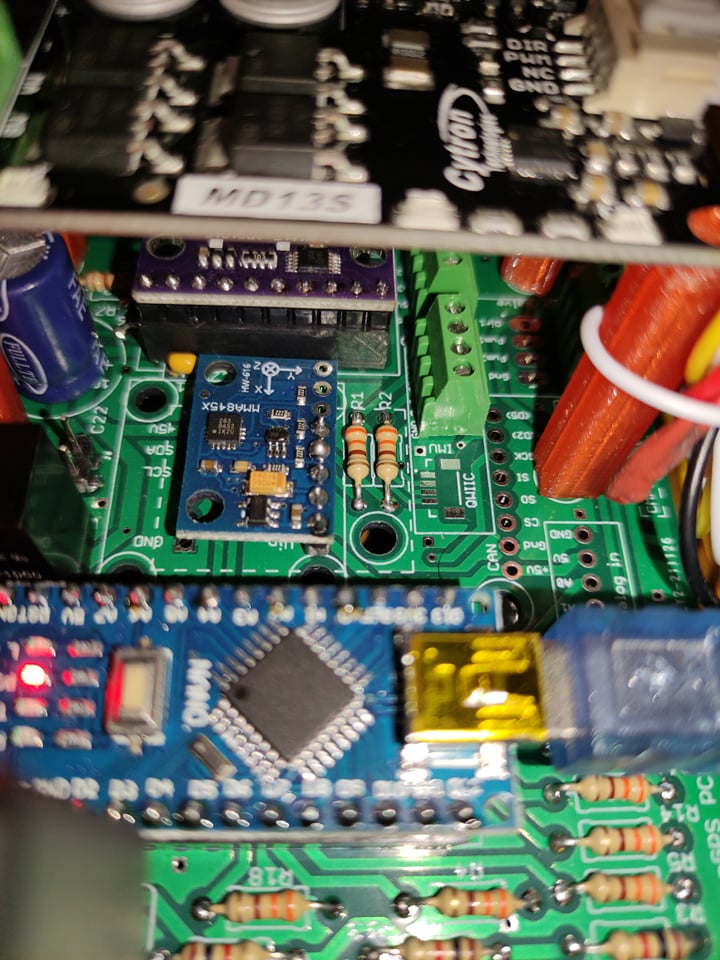
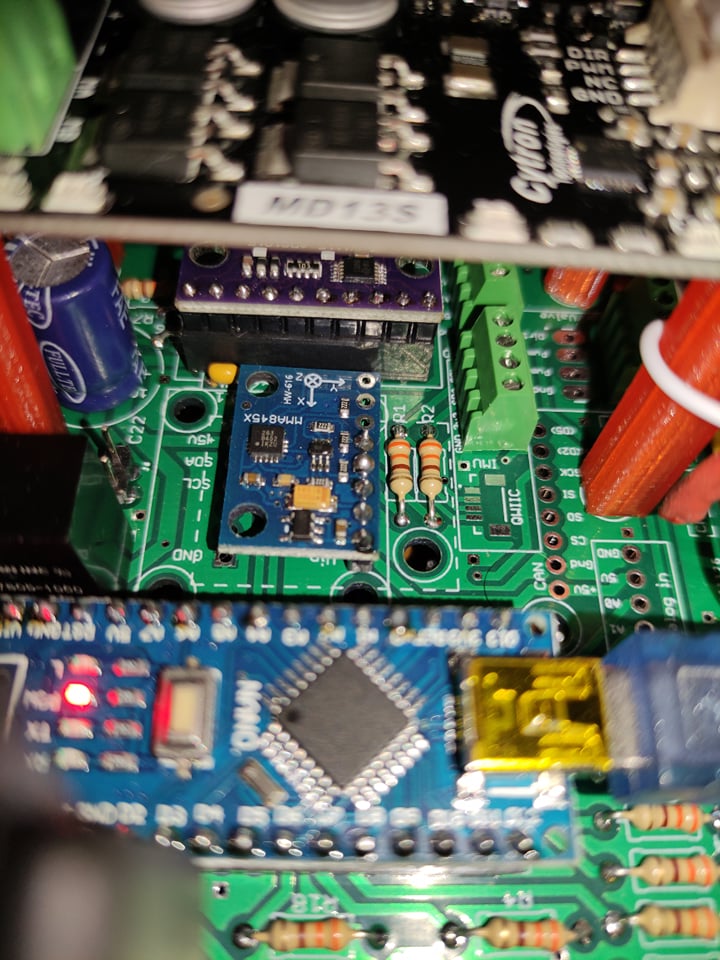
Hello, i have a question if some one cold help out so i made the kaopi autosteer board and it is working all beside the IMU it says on the serial monitor cant make the conection to BN008X wat is in the code, and the heading in AGO GPS ofc says 9999… i was using the MMA8452Q (MMA7361) module, the chip one form e bay (i were not shure if i cold get make all of this work so i get the chep components)…
so can i make it some how work? or do i have to order the original one? or did i maybe make some mistake or do i miss a part? i put a pic here…and thanks in advance ![]() i have flat ground but i wold like to make the auto steer work propertly also i have another arduino and a gy-271, giro its ok fore me to put it on separete but i cant fide the code to run it on a arudino that cold agOpen read if some one have the code fore it or somthing simular i wold be grateful
i have flat ground but i wold like to make the auto steer work propertly also i have another arduino and a gy-271, giro its ok fore me to put it on separete but i cant fide the code to run it on a arudino that cold agOpen read if some one have the code fore it or somthing simular i wold be grateful
MMA and V5 arduino code are not really compatible need a BNO or CMPS14
witch ino did you transfert to Nano?
Autosteer_USB_v5_0
You placed MMA instead of BNO085, that is not compareable and can’t work anyway!
no choice
need to find bno080-085 or CMPS
the MMA is only compatible with V4
so i have to get the bno080-085 or CMPS replace the one on bord and it shodl work?
yea i did it, i didint know, but tnx
You can look at this post “News update” towards December 2021, @jhandel published a modification to be able to use the BNO055 in V5
u maybe have link? im kinde a lost on this forum cant finde a thing
Have tested . Roll with bno55 IS a bullshit
That’s why initially there is no support for it in V5
That’s nothing new, use MMA for roll, like in V4.3, but this combination with BNO055 should work like in previous version.
I think you guys just answered a question I was about to ask. Just back from dropping off a PCBv2 to a member here and he farms some pretty hilly land. I am struggling to find BNO08X at a reasonable price and have found a couple of “BNO085” units that, upon closer examination, turn out to be 055. He has discovered the same.
Is there a world of difference between these? Is the 055 no use on steep gradients?
Look here:
https://discourse.agopengps.com/t/cmps14-compass/3300/127
BNO055 3 axis accelero, 3 axis gyro, 3 axis magno, running its ones fusion algorithms to output yaw, pitch, roll angles. But what subject to short term drift. SO it’s why it was use only for heading, not for roll.
MMA : accelerometer, so it can output pitch and roll, but as it’s an accelero, it’s very sensitive to vibration, so output signal was noisy.
BNO08x/CMPS14 : same hardware than BNO055, but with more powerfull algorithm to output really more stable values.
Blockzitat
So that explains why I was getting on fine with the 055 ages ago, because the fields I used were as flat as a pancake.
sory fore bothering but one more qwestion Autosteer_USB_v5_0.zip.txt file… wat shold i do whit it to be able to open it in arduino ide? also wats you guys think to use the gy-80 or gy85 board wold it work whit the code? its lot cheper and i have flat feelds
did you rename and unzip it ?
no, i wos not shure if i shold or not so i renaim it in autositeer_usb_v5.0 ? and unzip it?
firsc rename it to cancel the “.txt”
and unzip it to have a folder
and open the aduino files!