Yes, they are quite cagey about releasing firmware. Not sure why they would intentionally handicap their product but it is their decision to make. Ublox and others have a firmware download section on their websites.
Dear Chri5k,
I think in some these low cost receivers due to the shock/jerk when mounted on a tractor, the RTK performance may degrade/get damaged occationally (I think it affects the oscillator in the GNSS receiver).
But the comparison of UM982 vs F9P is very useful, thanks!
Chri5k, can you please let us know which triple band GNSS antenna model did you buy from aliexpress? Apologies if you had mentioned already, but I couldnt find it.
If any one has any recommendations for any other low cost triple band GNSS antenna, please do let us know.
1 Like
I have received an expensive receiver, Ardusimple RTK2bLite, with an LED that came loose from the board. This occurred during shipping I presume. I would think any module / board type GNNS receiver that is improperly mounted could suffer damage in a tractor.
Here is a link to the post about 3-band antennas. Is the UM982 an F9P killer for AOG? - #190 by chri5k
This are biggest position deviation from average that um982 reported. On dual band base, 1h test.
Deviation of longitude:
+0.0000001151 -0.000000115 dec deg from average longitude.
Dev MAX lon ±12.7075320489mm
Deviation of latitude:
+0.0000001232 -0.000000167 dec deg from average latitude.
Dev MAX lat ±16.0950001487mm
This are average deviations:
Average deviation lon 0.000000031 dec deg.
Average deviation lat 0.000000030 dec deg.
Hello, I am interested in purchasing a UM980 because its cost is cheaper than F9P. But I have questions:
-
I see that ESP32 is configured for wifi, but is it possible to use bluetooth for the connection?
-
my use will be with an Android smartphone, are the current applications compatible with UM980?
The UM982 board only has UART communications. There is no ESP32 on the board. The UM982 would have to be teamed up with an ESP32 via a PCB or breadboard. This would be something you would have to build. There are some ESP32 Wifi/Bluetooth to serial sketches out there but I don’t have a link handy.
Yes indeed, you have to add esp32. I have a tutorial that explains the installation.
https://simeononsecurity.com/guides/budget-diy-gps-gnss-base-station-setup-esp32-um980/
But I would have liked a Bluetooth solution like there is with the F9P.
According to my calculations an F9P solution would cost me 350€ and for the UM980 200€. This would suit me for amateur use.
This topic has a lot of information, but not on compatibility with current software? Does everything work the same way?
Everything is kind of a broad term. Which current software?
F9P specific stuff like configurations does not work. This thread was started to look at the capabilities of the UM982 to see if it could be a lower cost alternative to the F9P. So far it seems quite capable in terms of speed, accuracy, etc. for use with AOG. It is still a work in progress with some early adopters trialing it.
For single GPS with IMU, the current AOG firmware does work. The UM982 can output the required NMEA GGA and VTG sentences.
Edit: I forgot about the GNSS Store module. It is pin for pin compatible with F9P boards. UM982 Mic Dual Channel RTK GNSS receiver
For dual GPS, it needs some modification to the AOG firmware. I have some modified firmware in my repo to use the UM982 with the Teensy based boards. Once it has been more thoroughly tested, I will submit a PR to the main AOG repo to formally add the UM982 software support to the main line firmware.
The current AIO Standard board has an error where the TX/RX pins are reversed so it does not work with that board without reworking the board.
The soon to be released v4.4 Standard board has fixed that error and added access to all 3 UM982 UART’s, better clearance for the antenna connectors, mounting holes, solder jumpers to enable the external LED’s for initial fix, RTK fix and board errors. There will be a header for the external LED’s to facilitate mounting in a case.
The UM982 can be configured via the UART ports using any serial terminal application. There is also the Unicore Uprecise application for monitoring and configuration.
U-blox Ucenter can also read the UM982 serial output for graphs and monitoring. Configuration via Ucenter does not work.
I have just started work on the base station side of the UM982. It does work with Ardusimple WiFi NTRIP Master board but without an Xbee socket it needs a carrier or breadboard. Once I figure out what is needed, I’ll probably make an EasyEDA PCB for a UM982 base station with an Xbee socket.
1 Like
Any idea if the UM982 will work with RTKBase?
1 Like
Um982 base work with esp32 as wifi ntrip master as well.
I did some pole tests with UM982 dual and 2 IMUs. Both static and dynamic. IMU BNO08X, both IMUs are used in UART-RVC 100hz mode. UM982 outputs GGA,VTG,HPR sentences at 10hz. For this test master antenna is HA901A (3band), slave antenna is bt560 (dual band) with 150cm baseline between them. RTK base station is 3band. Every 10 points on X axis is 1 second.
Settings for um982 are below:
Freset // reset to factory settings
Unlogall // off all messages
Mode rover automotive //
Headingmode tractor // for agricultural machinery
config heading offset 90 0 // offset of antennas
config heading length 150 0 // baseline
Gpgga com1 0.1
Gpvtg com1 0.1
Gphpr com1 0.1
Config com1 460800 // baud rate
Saveconfig // save config
Hire is static test at 0 deg.

Average of UM982 roll is 0.48deg
Standard deviation 0.25deg
This is static test at expected 10.9deg measured by height and geometry. Test was done also in - direction by rotation of rood 180deg.

| Standard deviation | 0.14deg |
|---|---|
| Average roll | 11.3deg |
| Standard deviation | 0.32deg |
|---|---|
| Average roll | -10.0deg |
Hire we can see IMUs start to diverge as well. They are always close when roll is close to 0 but they can diverge up to 1deg in some cases. This behavior is seen in many tests.
Next are dynamic tests:
These next 3 tests where carried out without pole, so rood/antennas sit on 0 height and rotate around pivot. I first move rood to stoppers slowly and stay there for few seconds. So we have reference for what actual roll output should be. Then fast hit stoppers at ether side.


So in very dynamic environment IMUs seem to overreact. But tractor has less dynamic environment then this.
This is control slow moving test with same conditions.
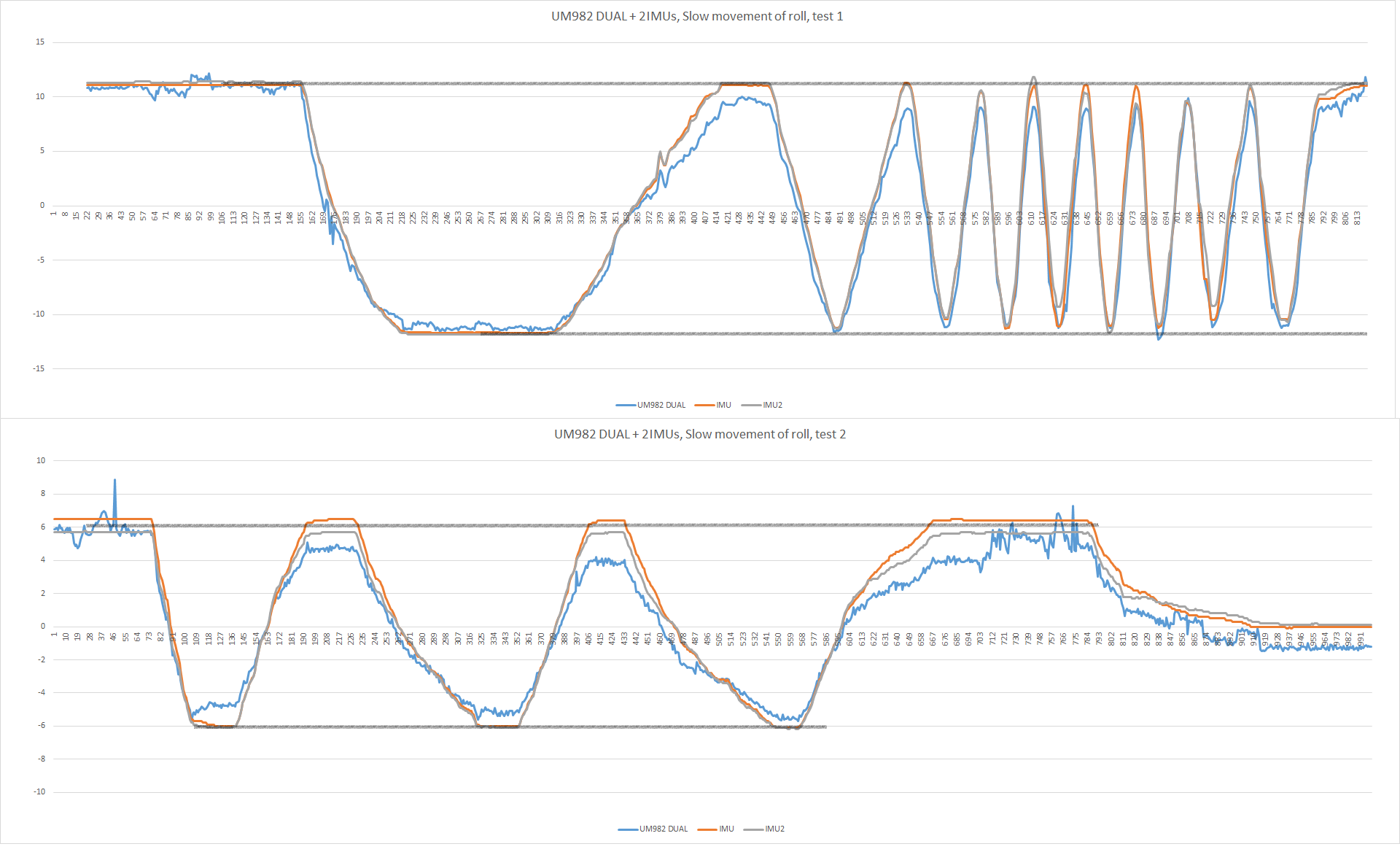
This is pole (235cm height) test, one IMU is next to antenna other is 100cm from pivot point on center of pole.
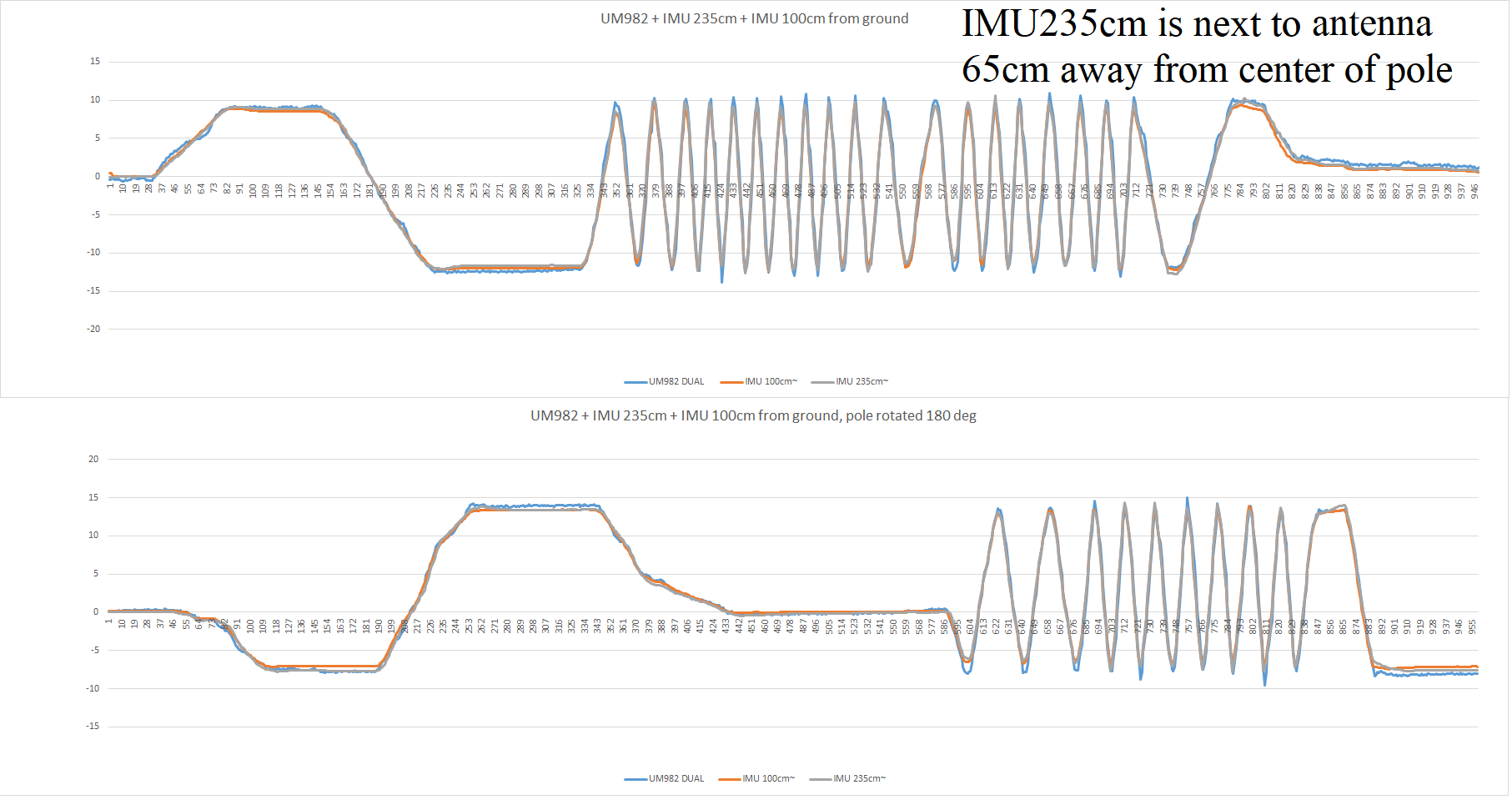
And hire is random movement test with movement in Z direction as well. This is to not have “perfect” roll scenario, and should be closer to actual field requirements. All 3 roll sensors seam to output roll very close to each other.

Dual roll from um982 in static and dynamic pole tests seams equally good as IMUs. Some filtering can help when roll is not changing much as dual roll jitters ±0.25 deg.
But real field test is required, even better to gather data in same style so comparison of dual and different heights of IMUs can be achieved.
3 Likes
Yes, the UM982 does work with RTKBase. I installed RTKBase 2.5.0 and configured the UM982 as a self-optimizing base station. Temporarily changed my stream going to rtk2go.com from the F9P RTKBase setup to the UM982 RTKBase setup. Verified messages are being received by rtk2go and AgIO.
The following messages need to be enabled on the UM982. The one with (10) are every 10 seconds and the others are every 1 second.
1004,1005(10),1006,1012,1019,1020,1033(10),1042,1045,1046,1077,1087,1097,1107,1127
1 Like
You only used RTKBase as an NTRIP server and caster then? In standard operation RTKBase will only receive raw data from the GNSS receiver and process it with RTKlib. (during install it would configure any F9P to enable RAWX and SFRBX and disable SBAS and NMEA) Could UM982 be configured to send raw data?
The UM982 does have messages with the same data as RAWX and SFRBX but they are not the same format as Ublox. What is the advantage of processing the raw data with RTKlib to create RTCMv3.3 messages versus using the onboard processing of either the F9P or UM982 to create RTCMv3.3 messages?
New AIO v4.5 STD board has been released! Greatly improved support for the UM982. Check it out here → AIO v4.5 update released
That is an impressive set of tests and graphics! But I am not sure about your summary. To me it seems that especially in slow and static situations the UM982 shows slow deviations that will certainly cause steering reactions. Based on this data, IMU seems preferable to me. However, the dual UM982 data may be flawed by using completely different antenna’s. (maybe this explains also why 0 degrees is not measured correctly) For ANN antenna’s U-blox advise is even to mount them in the same orientation, (both wires pointing in same direction)
I wouldn’t say it is better, but the standard RTKBase functioning offers more versatility. Like creating multiple different NTRIP streams, gathering RINEX data etc.
IMU is stable in “stable” conditions. Dual roll is always flawed, if we say that dual band vertical accuaracy is ±2.5cm then on 1.5m baseline roll can vary ±0.95deg that is if vertical position is in ±2.5cm range. If its worse then roll will be even more wrong. That is standard trade off of dual vs IMU. Dual produces roll in that tolerance and in short term its ±0.25deg. But from apsolute value that it can be its ± 0.95deg. Or worse if you are further from rtk base or conditions are not good.
F9P is even worse in this aspect as both antennas have ±2.5cm vertical accuaracy. So for F9P dual apsolute roll error can be ±1.89deg vs UM982 ±1.52deg as main UM982 antenna should output ±1.5cm vertical position. This side is not seen on test as roll is calculated from slave antenna position. So in test we see only one side of apsolute roll error.
IMUs have problems on bumps. For more stable conditions they work good. But dual roll should be more stable in rough field work where other forces influence output of IMU roll and heading. Atleast that is theory behind choosing between dual vs IMU system.
All of the functions in RTKBase worked. Ntrip A & B, Caster, RTCM TCP, RTCM Serial and File. File outputs RTCM files. My F9P based RTKBase outputs UBX with the file service. I did not see an option for RTKBase to convert UBX to Rinex.
1 Like
In the testing I did I used identical antenna pairs. The leads were facing the same direction. The antennas remained mounted. Only the cables inside the building were switched between receivers.
1 Like