I tried to set up the ardupilot, according to their site, bot had no luck. Looks like some mismatch betwiin AHRS and UM982 data.
For some reason i only can see the User Manual on Unicore site. Thanks for Reference Commands Manual.
Cool! Did you use for autonomus driving only? I imagine that i will be able to use my UM982 for autonomus navigation and for Raw data recording simultaneously.
It can be used in many industries. If you have strong integration capabilities, I recommend you to use modular products, but this is often difficult. There are now many terminal products that integrate modules and some other sensors, which are more convenient for autonomous driving users.
K825 is usually used on agricultural machinery, robots, and vehicles (if there are no vehicle regulations). How do you want to operate it? You can describe it and I will see what kind of help I can provide you.
Yuna,
My USV have a Raspberry Pi CM4 as a main computer and Ardupilot as an autopilot. UM982 should be connected to Ardupilot via uart1 and to RPiCM4 via second UART. So, Raspberry PI should record Raw data and heading information from UM982. And Autopilot should use position and heading information from same UM982 in the same time. Now our software engineer started to ply with it and faced the problem - UM982 did not respond to commands from commands manual. Uprecise software working fine from the other hand.
I suggest you directly connect your computer with UM982 first, check the serial port baud rate and some other information, and confirm whether it can be adjusted. If this cannot be solved, it may be that there is something wrong with the UM982 in your hand. Maybe Need to replace with a new one
I think Unicore recommends using com1 for servicing the device and com2 and com3 for integration.
Most Unicore data commands need an A or B suffix to denote sending an ascii or binary response.
I have two of them, both working well with Windows PC software - Unicore Precise. But when we swith to Linux and Pyton, problem appears
1 Like
Thank you, will try!
Check line endings. Windows usually uses crlf and Linux lf. UM982 requires crlf.
2 Likes
It helps, thank you! now we can continue
Theoretically all NMEA sentences from any receiver should be terminated with CRLF. That’s how it’s defined in the standard.
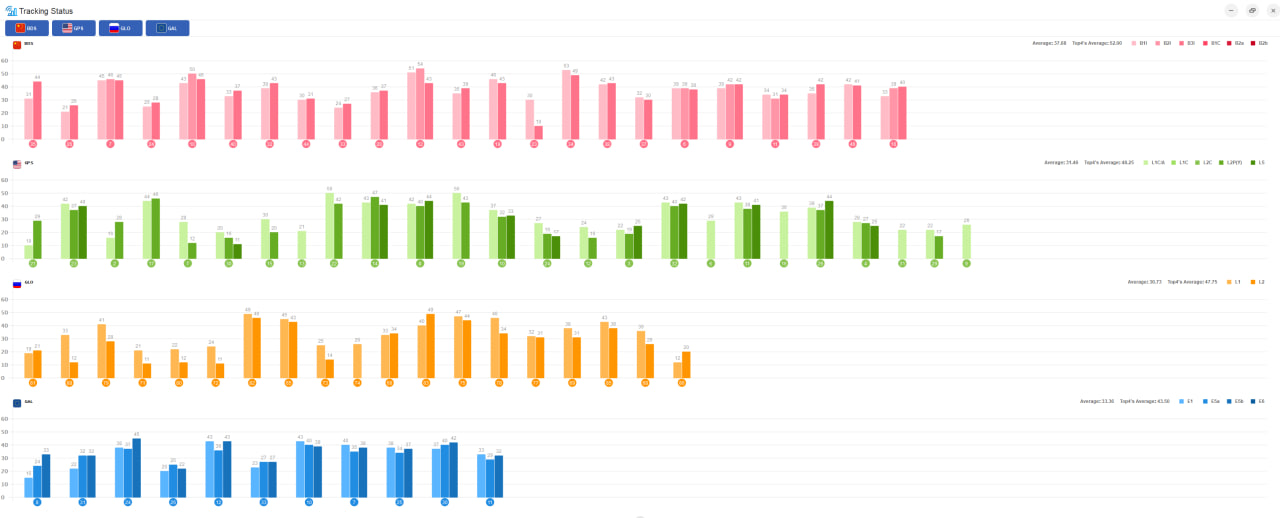
We sucessfully resieved RTCM stream from reciever, but some strange things. Here is a screenshot of multipath data. It looks strange because antenna was mounted on the car roof, had a clear sky and no obstacles near by. Antenna - AliExpress - интернет-магазин электроники,модных новинок, товаров для дома и сада, игрушек, товаров для спорта,автотоваров и многого другого | АлиЭкспресс
And RTKLib shows nothing in the Elevation window graph.
Any ideas?

Is that with MMP enabled? It is disabled by default.
What is “MMP”? Sory lack of knowledge)
Multi-path mitigation. It is in the command manual.
write please your confiuration um982
Not sure who you were asking for their configuration but here is my current one. This does change as I experiment more and learn about the different UM982 config parameters. The last two characters of each line is the checksum so ignore them. The forum editor does not seem to like the “*” character sometimes.
$command,mode,response: OK*5D
#MODE,73,GPS,FINE,2285,131954400,0,0,18,79;MODE ROVER SURVEY MOW,5E
$command,config,response: OK54
$CONFIG,ANTENNA,CONFIG ANTENNA POWERON7A
$CONFIG,NMEAVERSION,CONFIG NMEAVERSION V41047
$CONFIG,RTK,CONFIG RTK TIMEOUT 60069
$CONFIG,RTK,CONFIG RTK RELIABILITY 4 474
$CONFIG,PPP,CONFIG PPP TIMEOUT 3006C
$CONFIG,HEADING,CONFIG HEADING OFFSET 90.0 0.010
$CONFIG,HEADING,CONFIG HEADING RELIABILITY 064
$CONFIG,HEADING,CONFIG HEADING TRACTOR69
$CONFIG,HEADING,CONFIG HEADING LENGTH 0.00 0.0038
$CONFIG,DGPS,CONFIG DGPS TIMEOUT 60069
$CONFIG,RTCMB1CB2A,CONFIG RTCMB1CB2A ENABLE25
$CONFIG,ANTENNADELTAHEN,CONFIG ANTENNADELTAHEN 0.0000 0.0000 0.00003A
$CONFIG,SBAS,CONFIG SBAS DISABLE70
$CONFIG,PPS,CONFIG PPS ENABLE GPS POSITIVE 500000 1000 0 06E
$CONFIG,SIGNALGROUP,CONFIG SIGNALGROUP 4 505
$CONFIG,ANTIJAM,CONFIG ANTIJAM AUTO2B
$CONFIG,AGNSS,CONFIG AGNSS DISABLE70
$CONFIG,COM1,CONFIG COM1 11520023
$CONFIG,COM2,CONFIG COM2 4608002E
$CONFIG,COM3,CONFIG COM3 4608002E
#VERSION,77,GPS,FINE,2285,132549600,0,0,18,29;UM982,R4.10Build9984,HRPT00-S10C-P,2310415000012-LR23B2224524818,ff274098521ef48b,2023/06/01
Did a few plots using RTKLIB to compare the F9P with the UM982. Both used the same antenna setup which is what I would term somewhat obstructed. The antenna’s have about 1/3 of the southern sky obstructed making it very difficult to get an RTK Fix. Both receivers were able to get an RTK Float fix.
F9P was using the “main” antenna AOG configuration. The UM 982 was using the attached configuration. The biggest improvement to the UM982 data was seen by enabling Multi-path Mitigation (MMP). Changing the mode to Rover Survey Mow made an improvement but not as much as MPP.
test_config.txt (1.1 KB)
F9P Ground Track
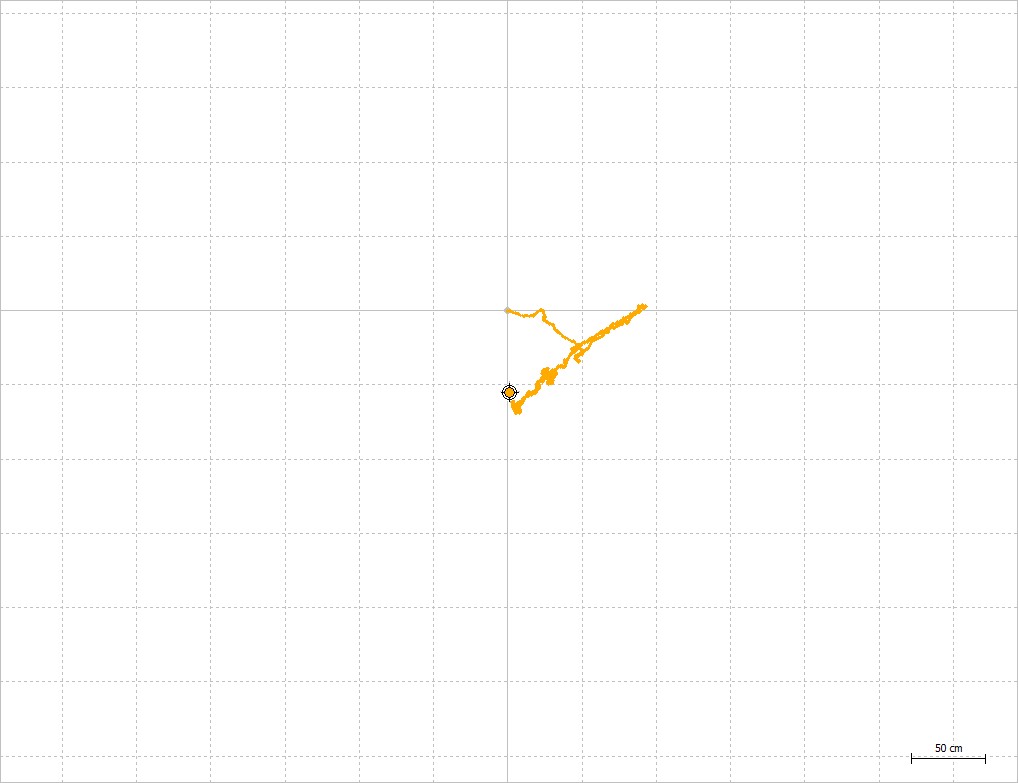
UM982 Ground Track

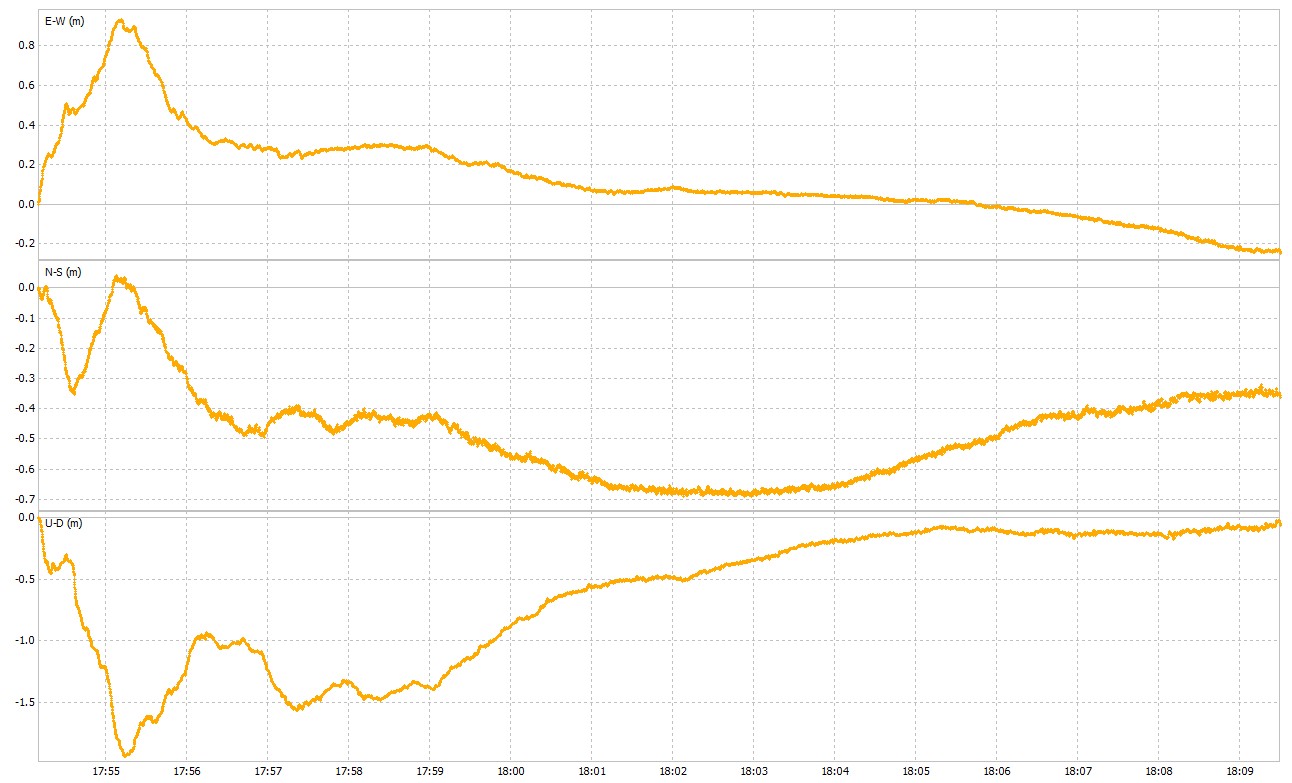
F9P Positioning
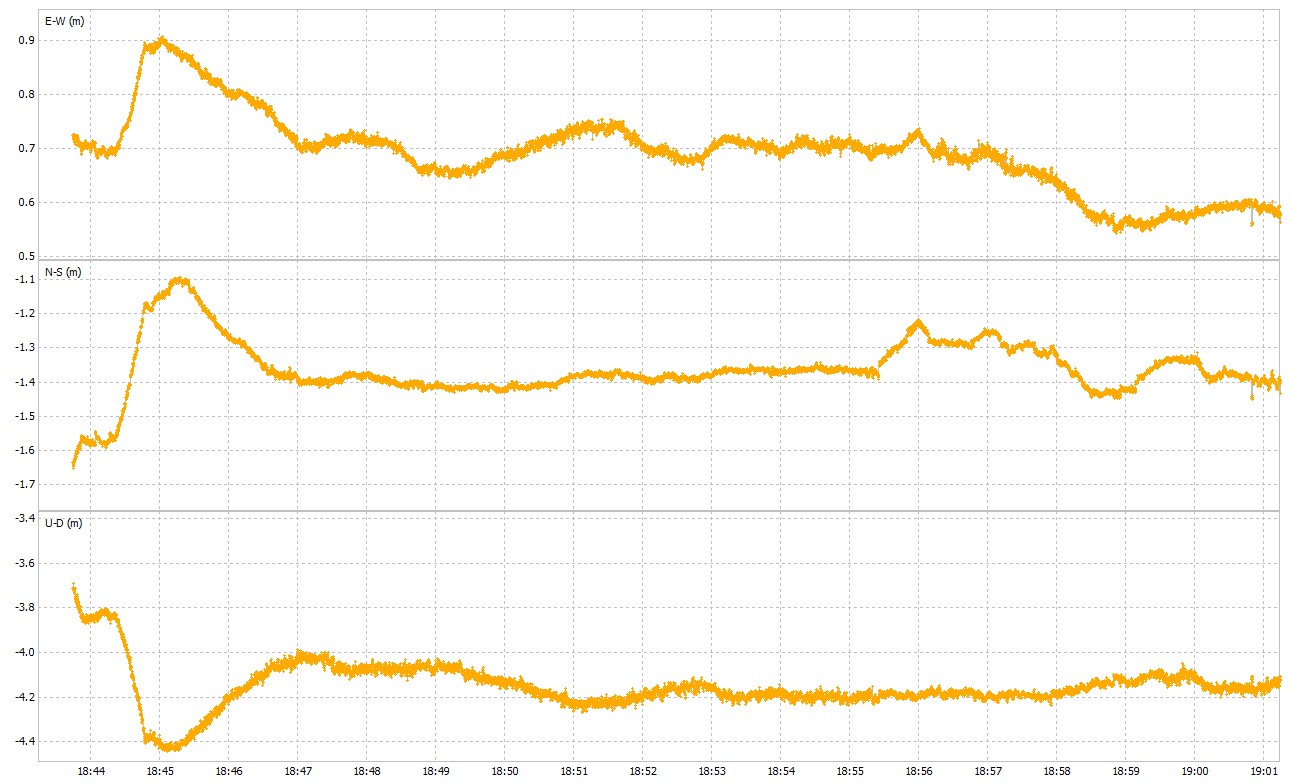
UM982 Positioning
2 Likes
Being as I’m not educated enough to make sense of the charts… do you feel one is significantly better than the other?
1 Like