So, the Keya CANBUS motor arrived a while back - a friend took a chance on buying one with the idea he could swap it between his Case combine and the Valtra he uses for spraying. Neither of course being in any way steer ready. I thought it was all ready to go in AOG, but that turned out not to be the situation. Bit of chat with the dev team and all thought that adding CANBUS support to existing firmware would be the way to go, instead of adding WAS support to Tony’s CANBUS firmware.
All that follows here is for the AIO boards - this works on AIO2.x and 4.x boards.
Rolled my sleeves up and cracked open the IDE - and it turned out to be pretty simple !

Stupidly, I didn’t take many photos of the build, but, well… there’s nothing to it. What you need to do is wire the plug as the following - look in the end and you’ll see the numbers, these are present on both plug and cable.
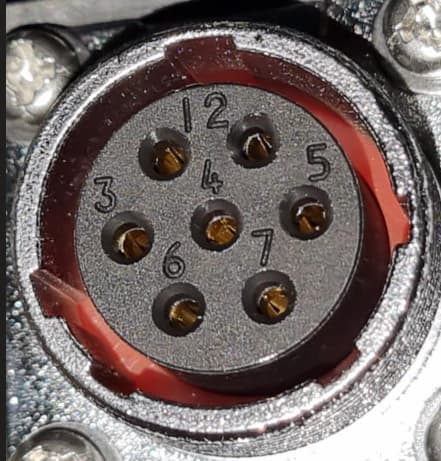
The pinout is:
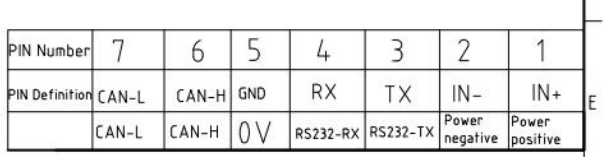
You’ll be powering 12V to pin 1, and GND to pin2 - and don’t power this through the AOG board! Put it on its own supply with a big huge “OFF!” switch for safety.
Pin 6 (CANH) goes to pin 16 on ampseal and pin 7 (CANL) goes to pin 17.
You’ll need a modified firmware and while the hope is that this eventually goes to mainstream, at the moment it’s still considered as in-testing, so I haven’t submitted a PR to the main branch as yet.
You can find my modified firmware here but make life easier by using the TeensyFlasher tool! Releases · lansalot/AOGTeensyFlasher · GitHub
The source is here (note - at time of writing you want the Keya branch, KeyaV2 is under development and not considered stable at the moment): GitHub - lansalot/AgOpenGPS_Boards at Keya
So, how it works - it’s hard-coded to presume presence of the Keya and act accordingly (V2 and Matt’s version will actually spot a Keya heartbeat and switch over accordingly - so you could use the same firmware to both turn a motor, engage hydraulics and steer Keya/CANBUS without modification).
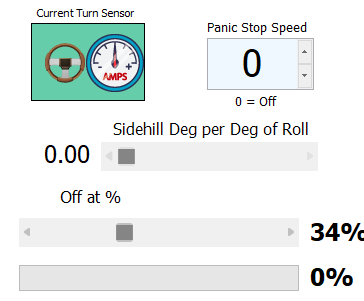
It outputs an amperage figure to allow disengagement if you grab the wheel. This figure is a good starting point:
AgOpenGPS requires no special changes, it just works as-is. Basically, we’re taking the PWM figures and just sending an appropriate steer command.
Notes:
- depending what wheel you buy from aliexpress, you might find it arrives without CANBUS support enabled. See below on how to handle that
- also, be careful when ordering - cheap ones likely don’t include an actual steering wheel or any bosses
- there’s a support group on Telegram here dedicated to Keya/AOG issues: Telegram: Join Group Chat
- Matt’s firmware is here and he has extended it to do some stuff with his 575 Lexion: AgOpenGPS_Boards-Old/TeensyModules/V4.1/Firmware at 575R-Keya · m-elias/AgOpenGPS_Boards-Old · GitHub
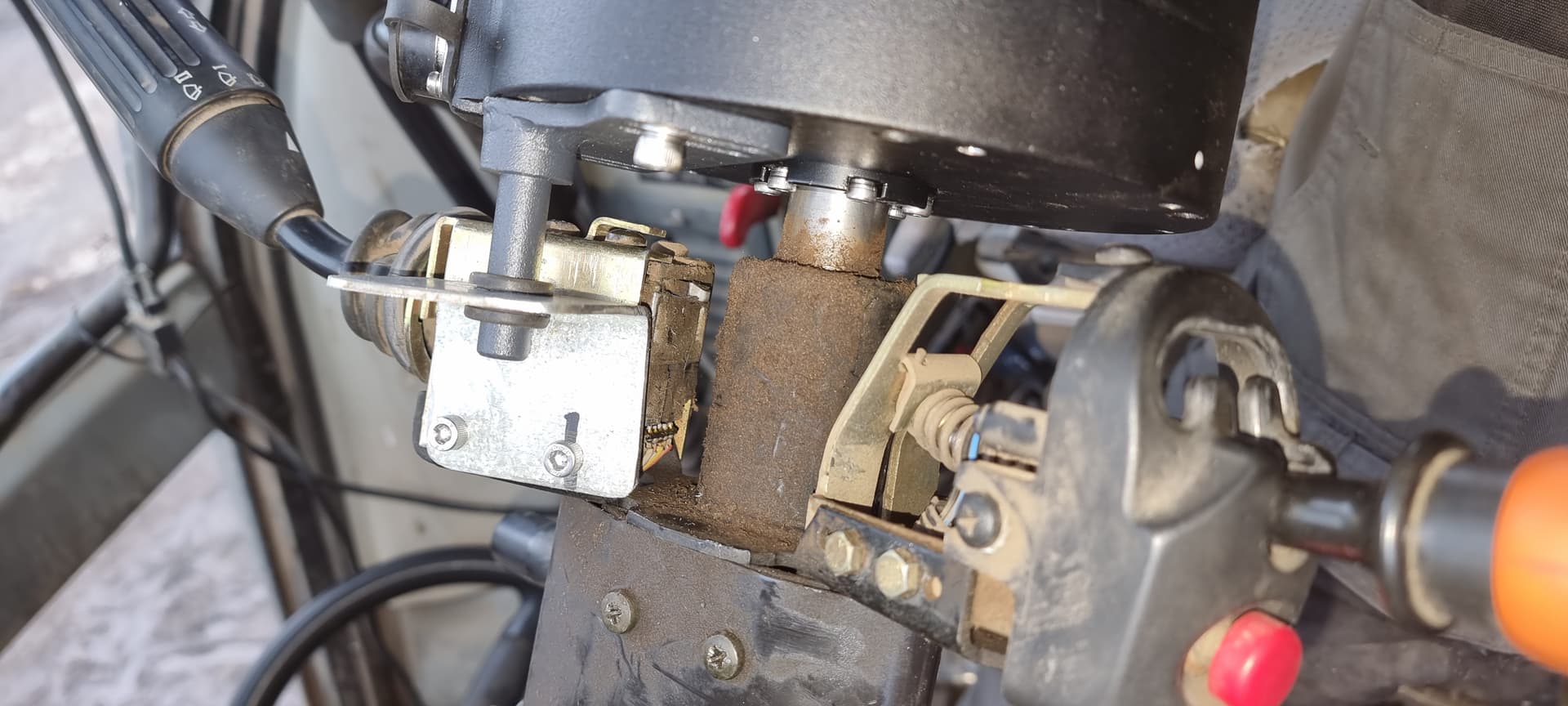
And this is what you’ll end up with !

Matt’s Lexion:

Troubleshooting
- If nothing at all happens
– check your CANBUS wiring (note, no termination is needed)
– does your board have the CANBUS transceivers fitted?
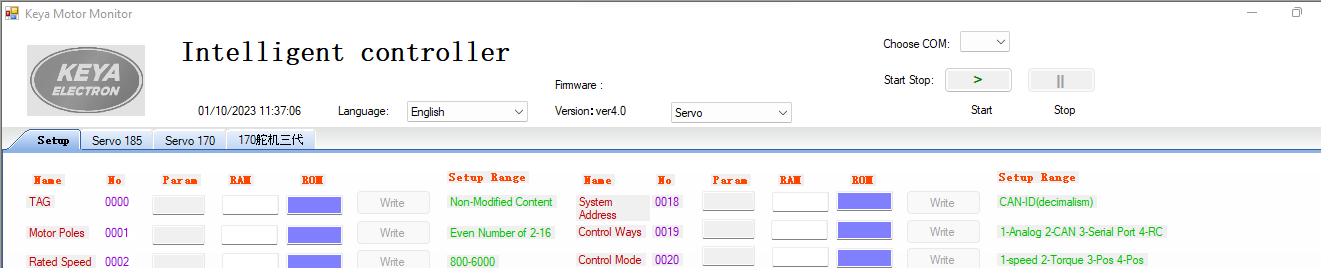
– is CANBUS mode set on the wheel itself, you might need the Keya software to do that.

Run the software, and with it connected over Serial, set parameter 19 to (2)
Where to buy:
This is the link direct from Keya’s own AliExpress store, and this is the latest version of the wheel - but note, at this time, Keya haven’t updated the documentation and there’s no information on how to order the correct steering wheel boss. So I’d hang fire or check in the Telegram channel at this time to see latest status. This post will be updated when that changes.