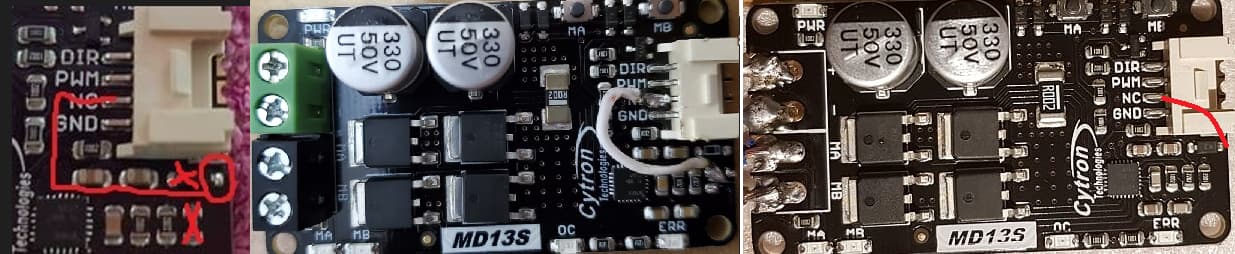
Hi! Recently interested in AOG so replying to your thread back in 2021. I still can’t figure out the correct points to connect. You responded to the post (by Steigerguy) here being wrong (though PotatoFarmer indicated Steigerguy did it right) and provided a link to the correct one. I am putting the two images together below as well as a 3rd with high res image from the internet.
So the one on the left is the correct one and the one in the middle is wrong? So that is connecting NC with the encircled red will be the right connection? The two red X means what? Referring to the image on the right, so to prevent the cytron from applying a brake, soldering a piece of wire between NC and the rightmost leg of the resistor should do it? Thanks.
Nacho is your AOG functional for sometime already? I am still starting my journey and would appreciate guidance on how to proceed. I take it your board is the kaupoi v4.1. You assembled it yourself? By any chance I can get a board with all the components soldered in. I did some soldering but is terrible at it. If you or others know where I can get one, will appreciate it very much.
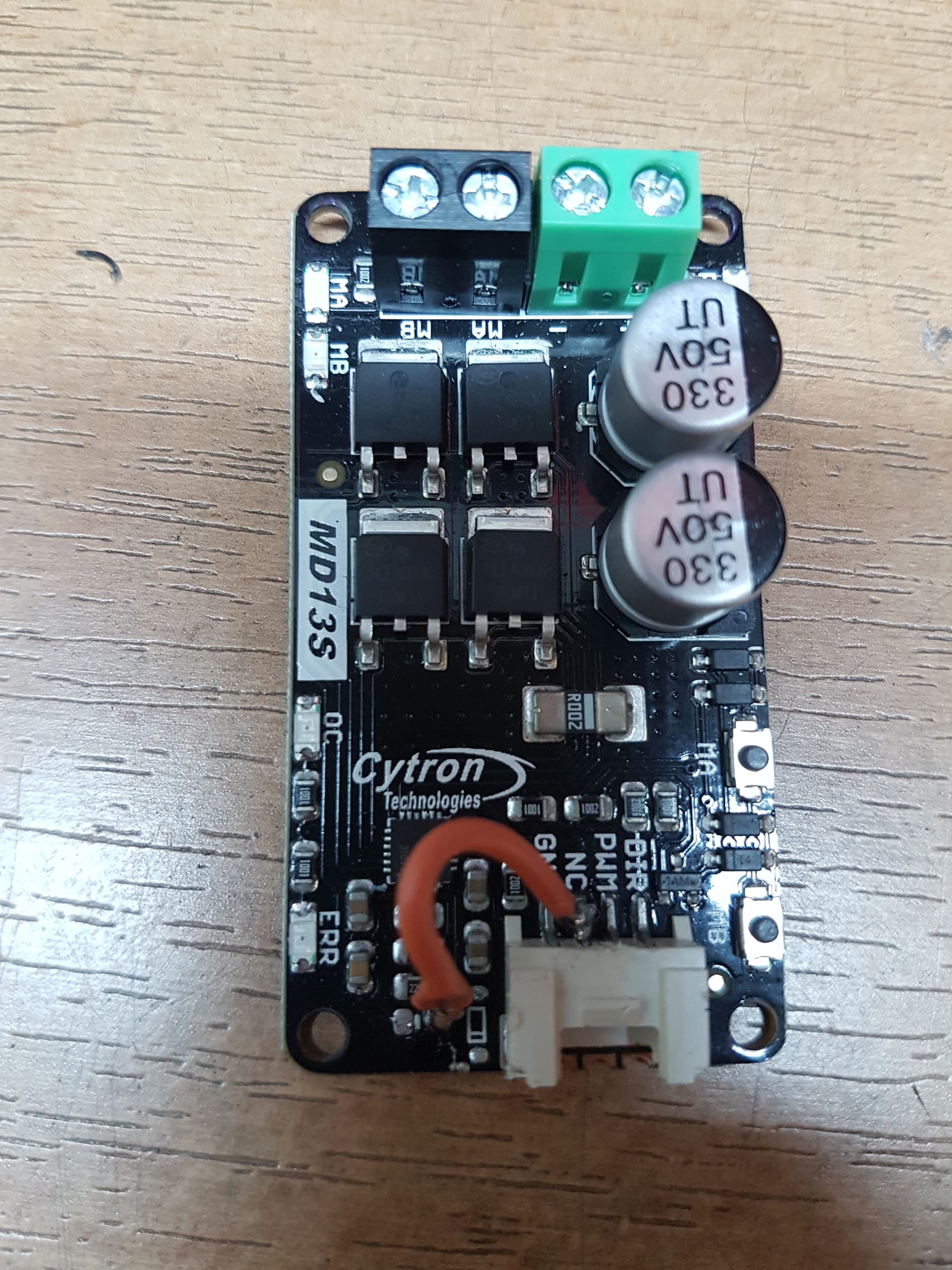
Just finished the free wheel modification on the Cytron. I bench tested afterwards and the motor is still turning but it seems to be running at a very constant speed even when I move the WAS way out of line. Is this normal or did I miss something? I did make a mistake a few days ago wiring up the 12-24v converter, I thought I dodged a bullet but I’m wondering if I may have damaged some part of the Cytron then.
I did connect all four wires. I think it is working as it should. I was only concerned because the last time I tested it (which was quite a while ago, I was using an older version of AOG and had a potentiometer hooked up as a WAS) the motor seemed to speed up significantly as the potentiometer was farther out of line. Then I had the mishap hooking up the 12/24 converter and had to replace that. I am now using the land rover sensor as a WAS and v5.5 and was surprised the motor didn’t move as fast. I did get another cytron in case but haven’t had time to swap them.
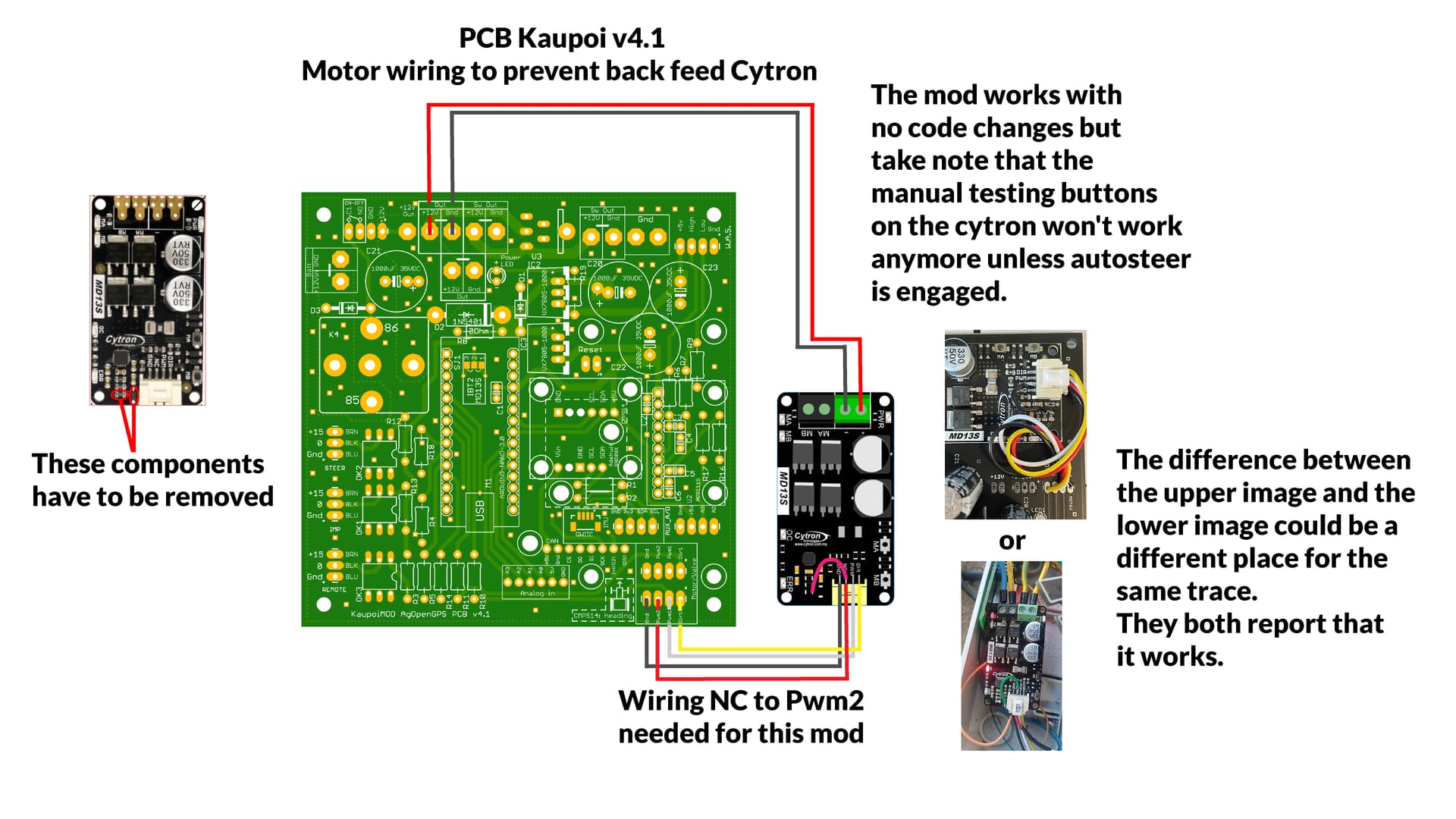
Hi I am using the Autosteer_UDP_v5_6 and do not have a PCB. I want to implement the Cytron free wheel mod. My understanding is that, except for removing two components on the Cytron and adding a jumper wire, I only have to connect NC (red cable) directly to digital pin 9 (PWM2) on the Nano. Is this correct? If so, why is the “new all in one bord” implementing a hole set of components for this?
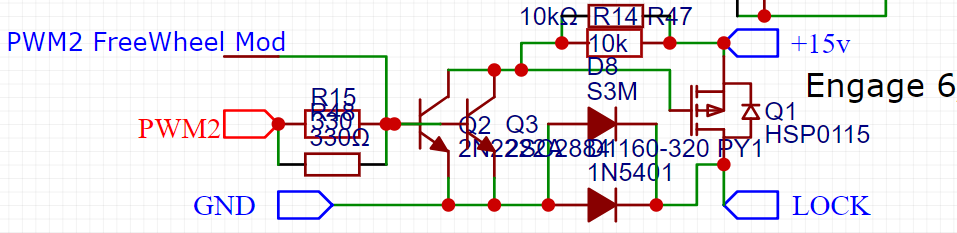
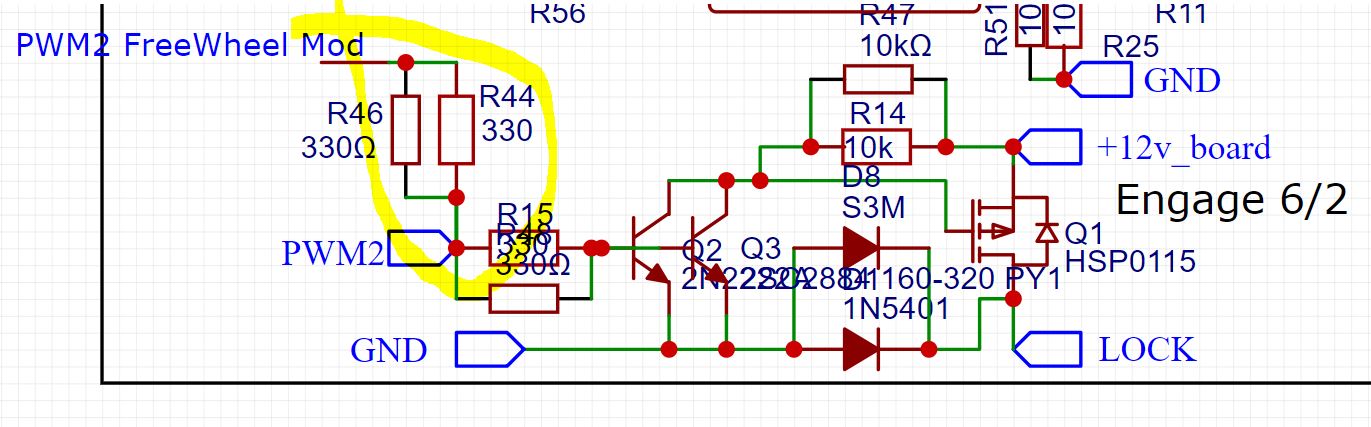
Part of the “New all in one bord”:
Those components are for operating the LOCK MOSFET with the same pwm2. Note, there’s been an update/fix on the latest design and there’s always two components for each part, thru hole and surface mount.
On the first v2.4 design, Q2/Q3 wouldn’t let the “PWM2 FreeWheel Mod” line go high enough to activate the Cytron’s with the free wheeling mod, so the latest design adds another branch off PWM2 for “PWM2 FreeWheel Mod” with it’s own protection resistor.
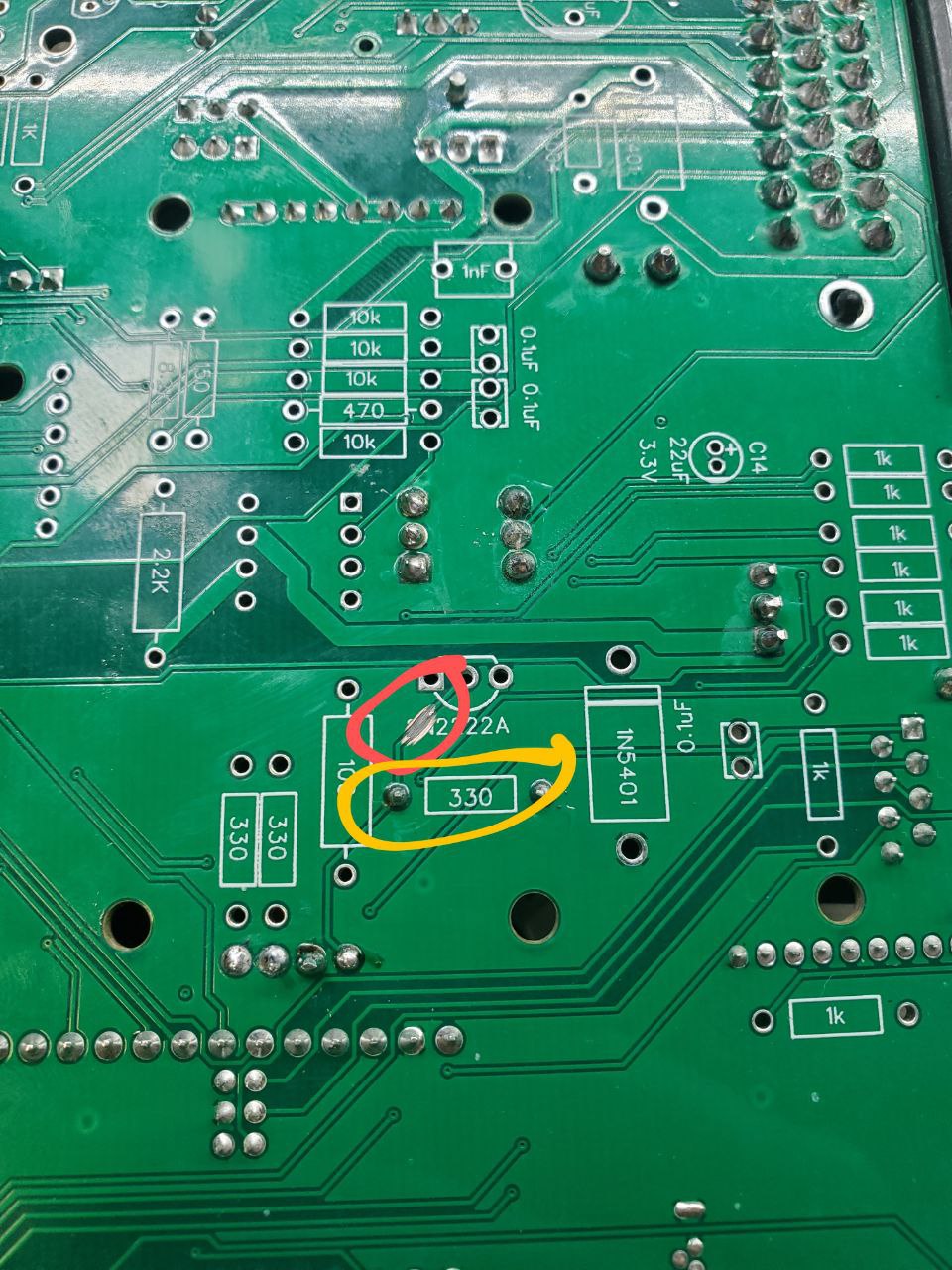
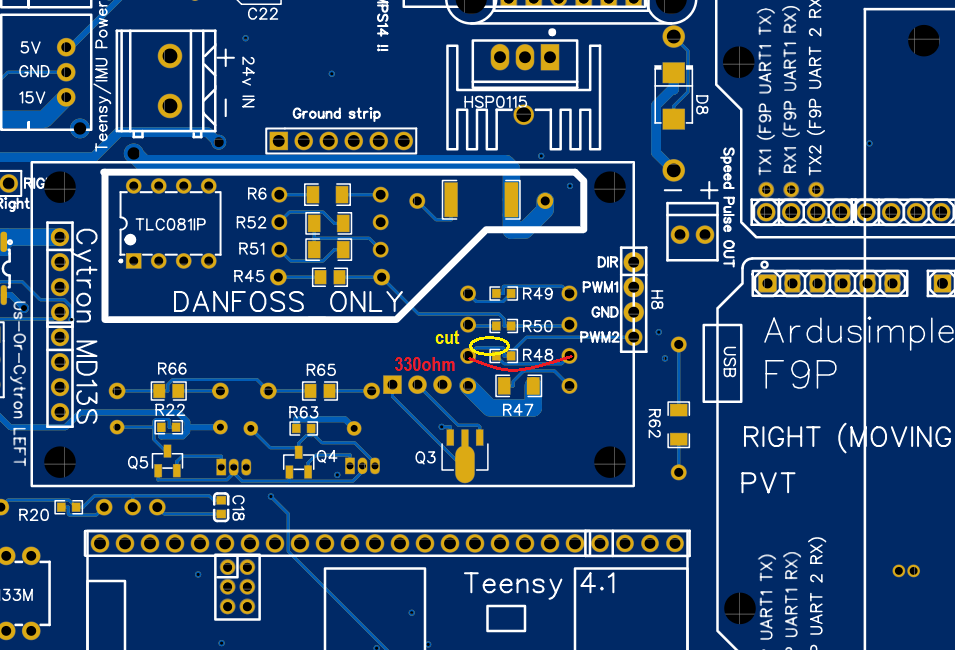
You misread the picture. There is no wire.
Both pictures tell to cut one spot, and put 330 ohm resistor the other.
Yellow and red are opposite in the last two pictures
If it is so wide voltage range, is the 330ohm resistor absolutely necessary. I don’t have any and I am wondering which household item I should tear apart to find one. I have one extra general purpose diode though with about 100ohm resistance and I wonder if that could do the job and protect for reverse current at the same time?