
We’ve got a 2021 CX combine with factory Autosteer fitted but would like to swap to AOG.
The combine has a 372 receiver and nav111 controller.
I’ve got an AIO board steering a Deutz over Canbus which I would plan to move to the combine for the summer.
Any advice much appreciated.


Hello,
You’re not alone, I have the same questions as yours for my CX 8.80 combine 2021.
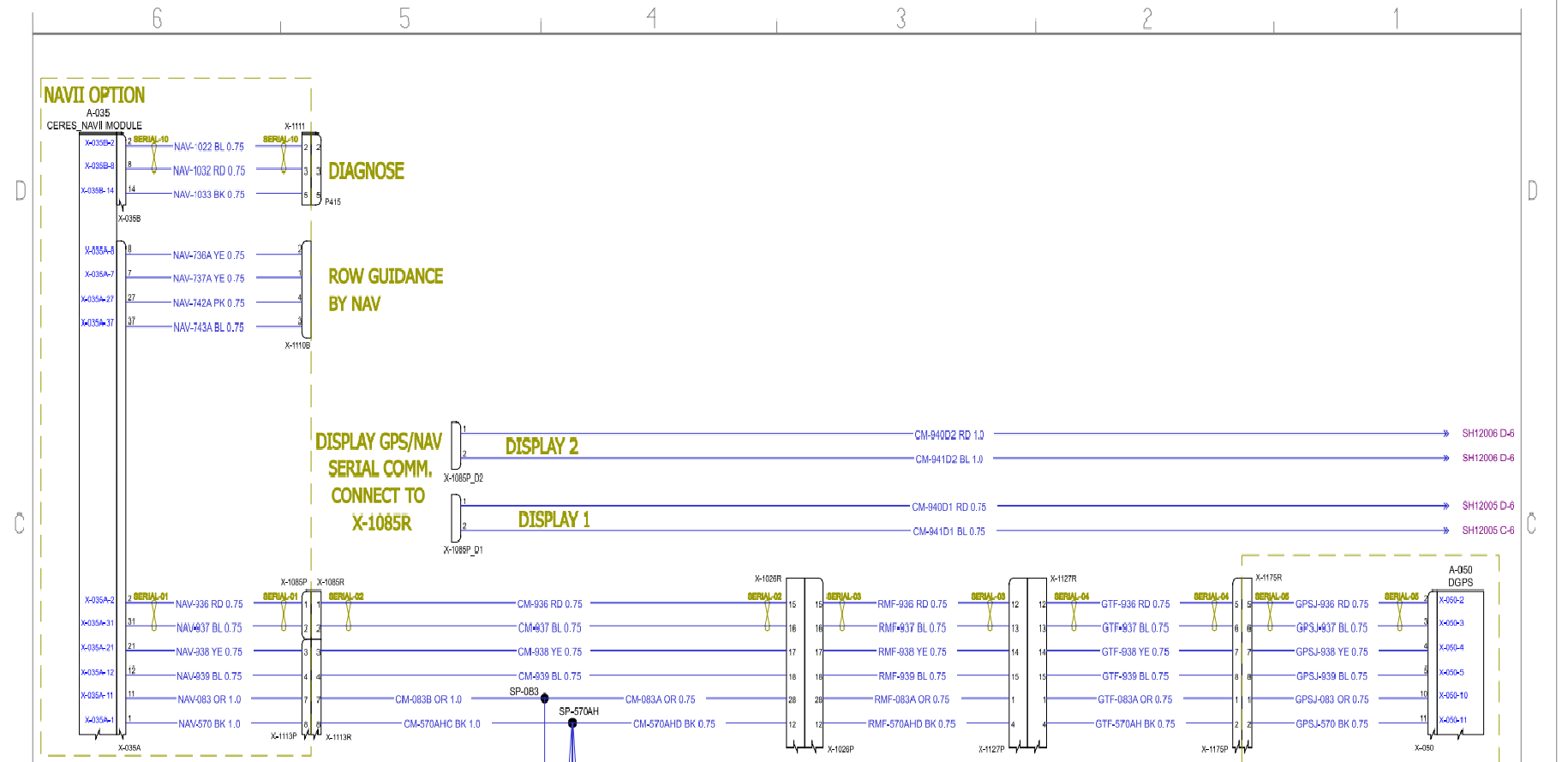
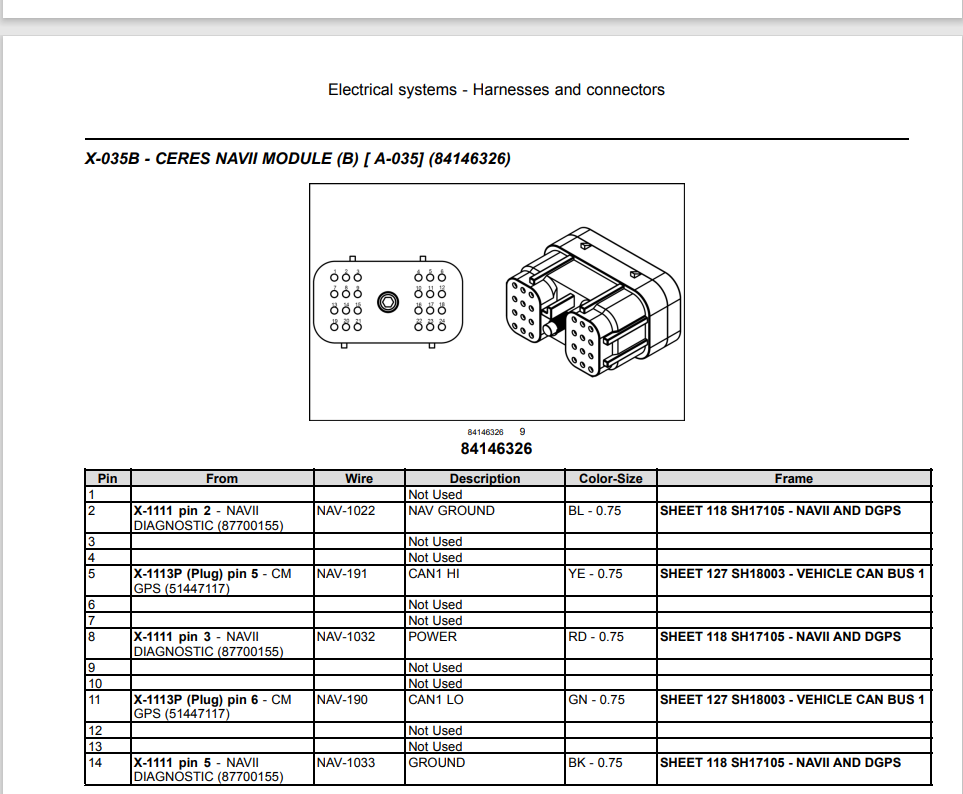
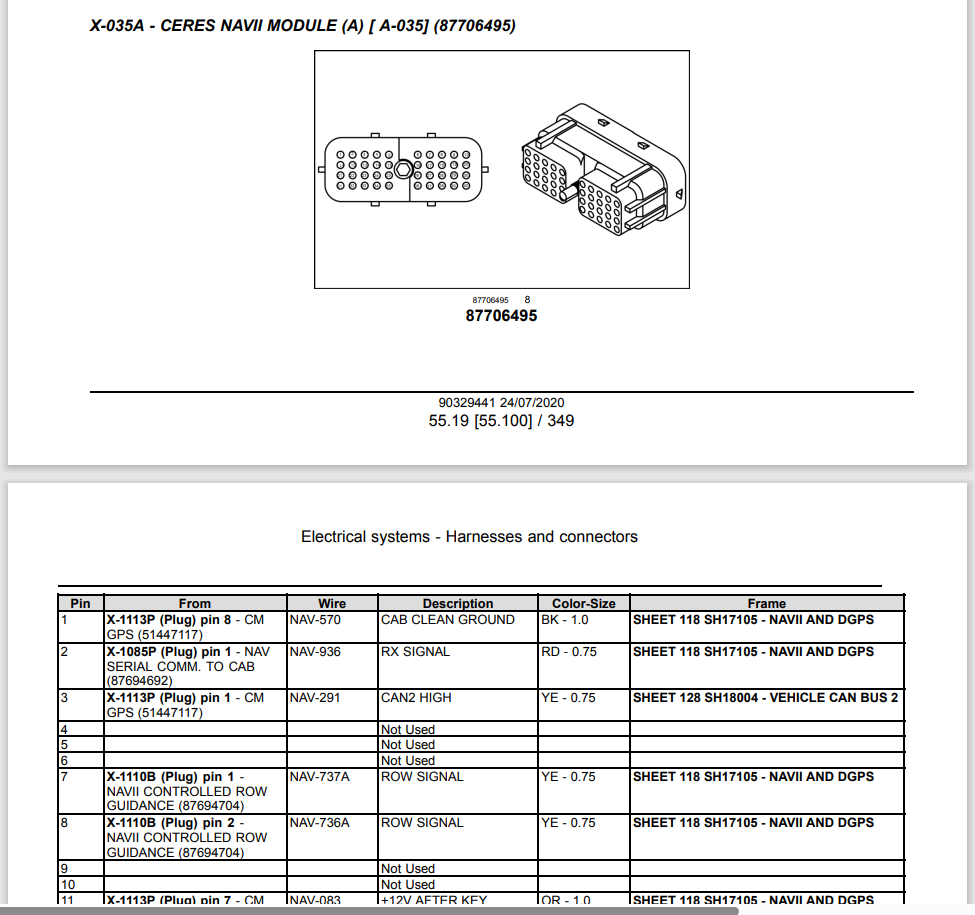
Do you have the wiring diagram for X-035A and X-035B connectors ?
Thanks that’s a great help I’ll have a look next week.
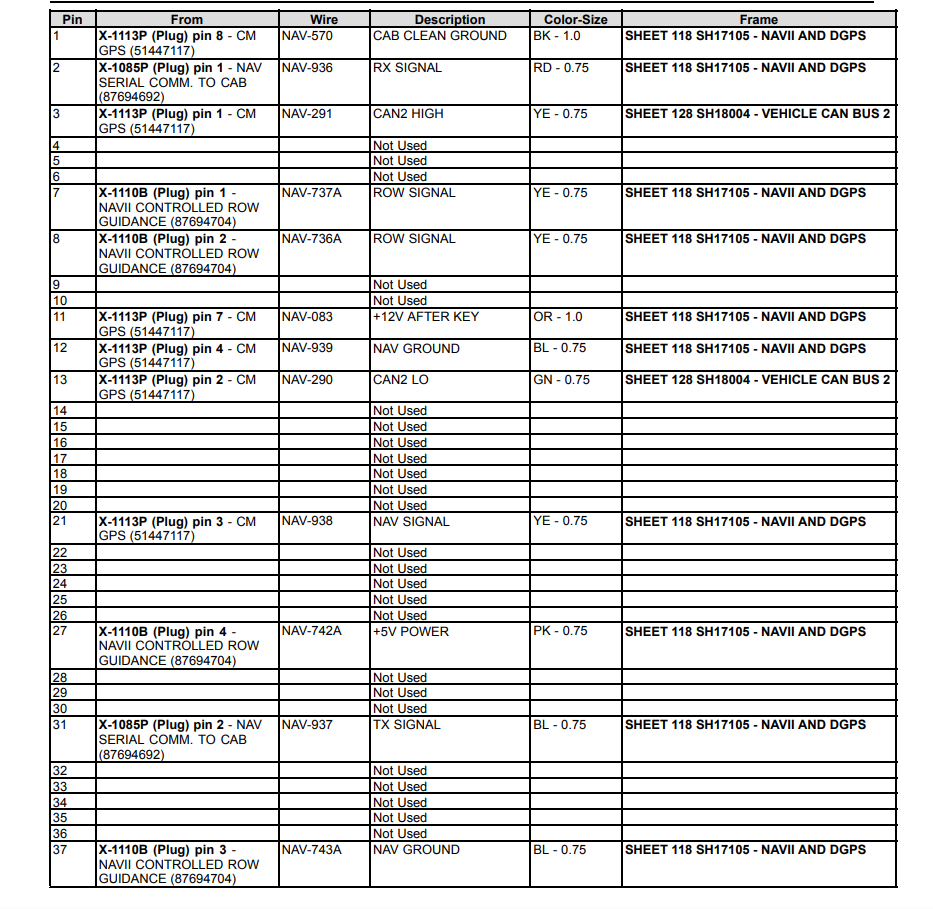
Hello I in France excuse my English, I have a CR from 2021 I just passed it in AOG, the NH harvesters are not in CAN, it is a PWM valve, I can give you the wiring diagram of the valve, I connected to the original angle sensor in the ECUs next to the seat, as well as the motor encoder and CAN for engagement. Now everything is functional after a lot of problems, especially for disengaging it with this famous encoder.
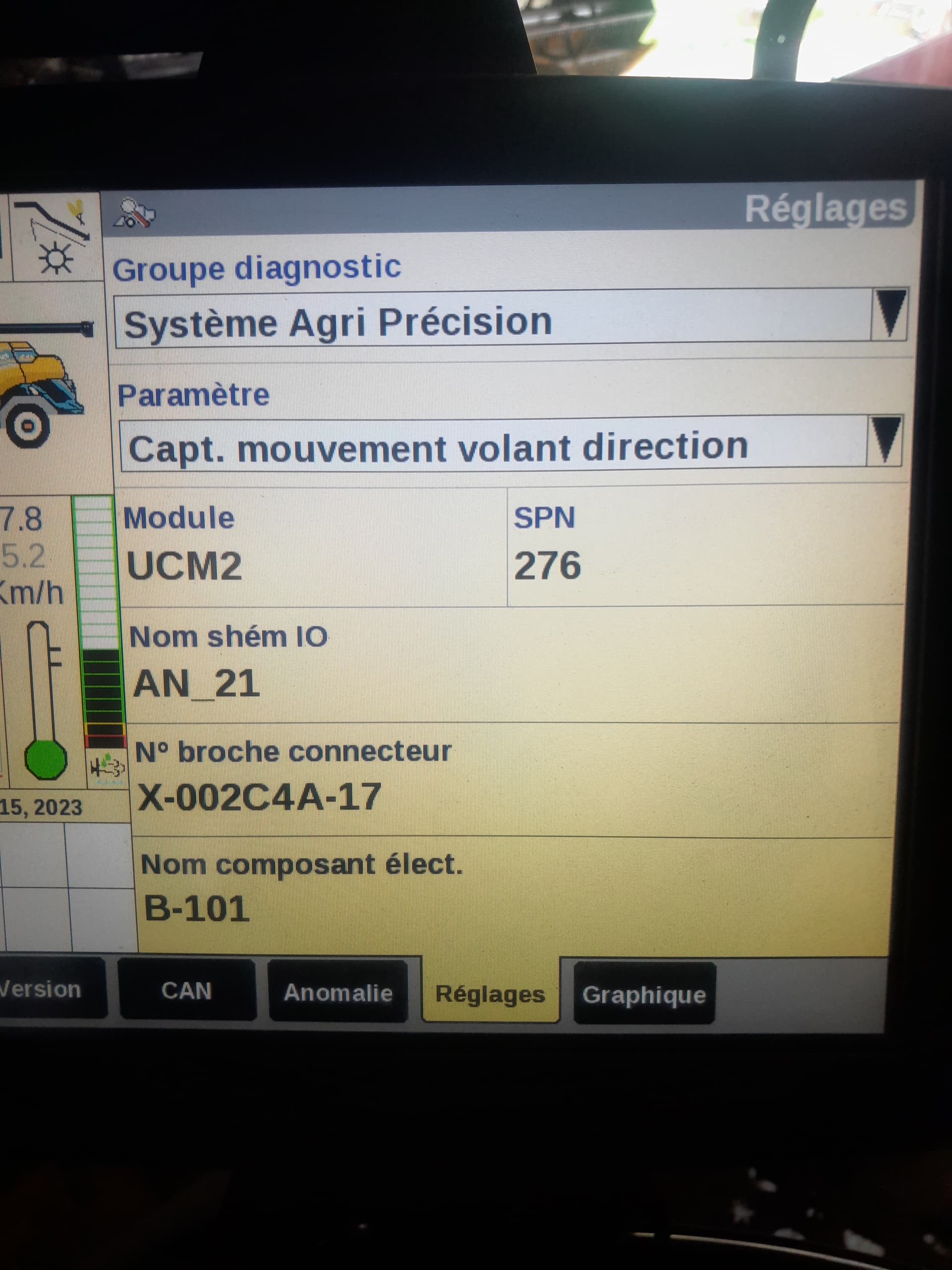
In the inteleview diagnostics you will find the information of the wires where you need to make the Y, for example the was ucm 2, connector X02C3B, wire n°13
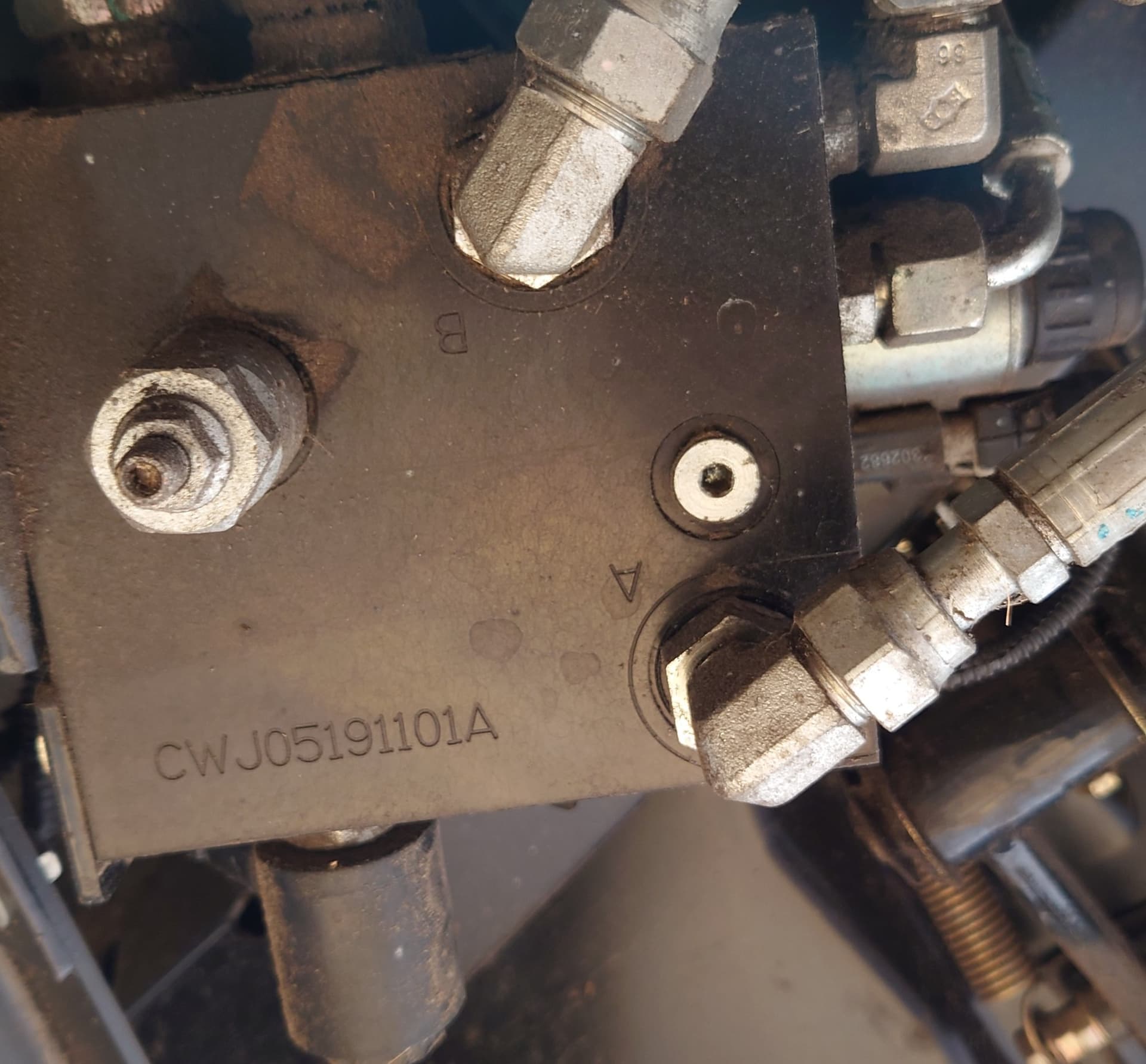
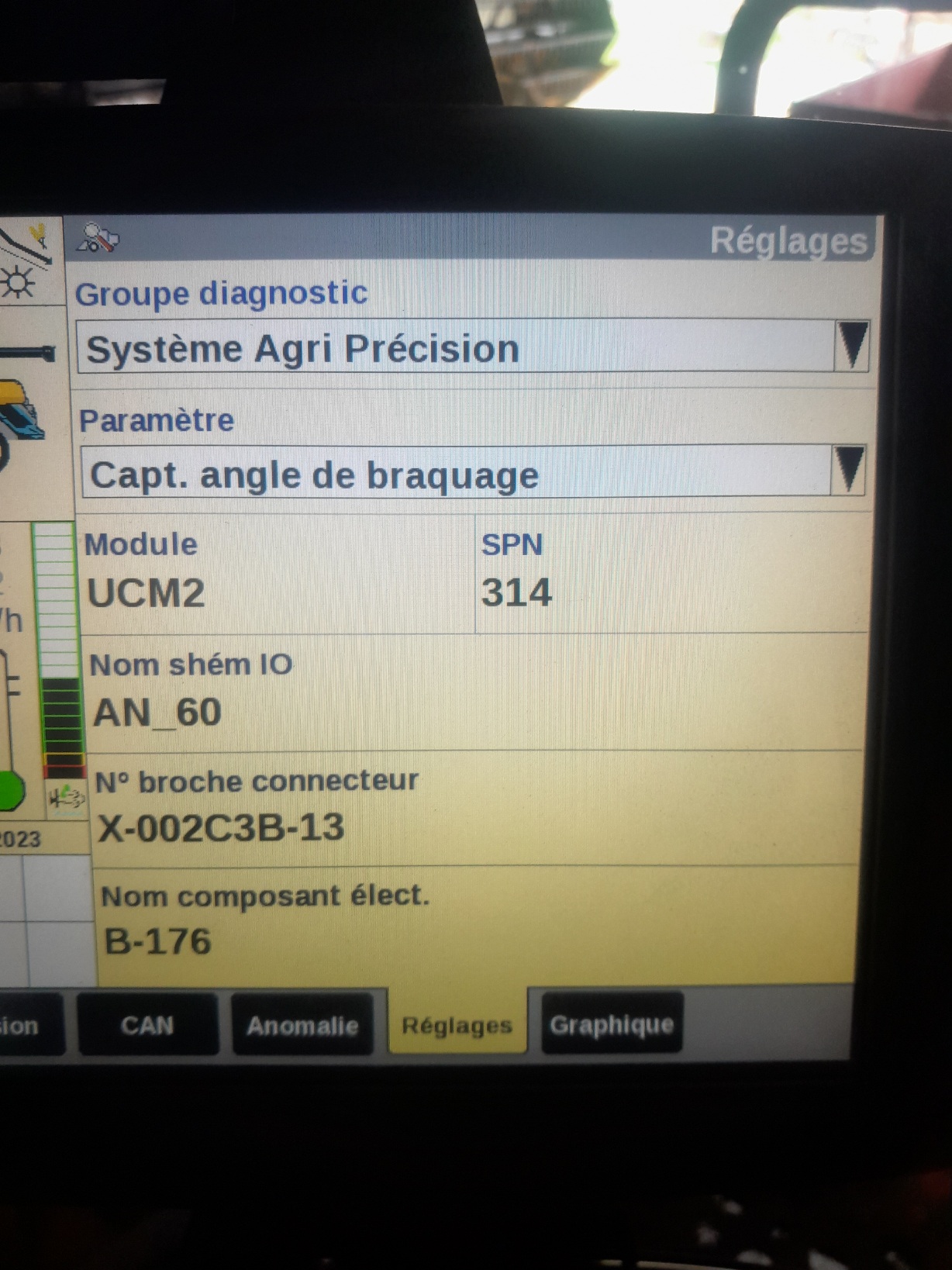
Valve Wiring Plan
@Flo Là ça devient intéressant.
J’ai repris l’info du capteur d’angle d’origine, ça ça fonctionne.
En revanche impossible pour moi de commander la valve, alors qu’avec un moteur ça marche.
J’ai fait un Y sous le plancher de cabine, les tensions me semblent bonnes (12V sur Lock dès l’activation), aucune réaction…
Je ne te cache pas que tes schémas de branchements m’intéressent. En MP si tu préfères.
Montage PCB AIO Std V4.5
I sent the plan of the valve harness above, however for the valve part you must not make a Y you must disconnect the original harness to connect AOG otherwise you will return 12 volts from AOG in the ucm of the harvester I’m not sure it’s very good

Okay many thanks for the information,what board and method are you using to connect to the valve?
Are using a cytron?
And if I understand correctly are you connecting to the wheel angle sensor in the cab?
I have an aio made in France made by Emmanuel. Yes the valve and connected to a Cytron I redid a harness which goes from the PCB to the valve. Yes it was and connected in the cabin just under the seat to the ucm wires.
how were you able to use the encoder/ steering wheel overide sensor?
I made a Y on the harness as for the Was, then I put a small voltage divider bridge module because the original voltage was between 3.9 and 6.3 volts from memory, and then bricbric from the France group told me made a modification to the ino to make this work. I believe it counts the number of value changes and if there are too quickly it disengages, if you are interested I will share the code.
thank you , Id like to see the code, and how you made the voltage divider bridge
Here is the link of the dividing bridge it divides by 5 all simple and effective
// Pressure sensor? // modif bric bric
if (steerConfig.PressureSensor) {
sensorSample = (float)analogRead(PRESSURE_SENSOR_PIN);
// sensorSample *= 0.25;
// sensorReading = sensorReading * 0.6 + sensorSample * 0.4;
if (abs(sensorSample - sensorSampleOld) > 1) Count++; // test 1
else Count--;
if (Count > 100) Count = 100;
if (Count < 1) Count = 1;
sensorReading = Count;
sensorSampleOld = sensorSample;
if (Count >= steerConfig.PulseCountMax)
// if (sensorReading >= steerConfig.PulseCountMax)
{
steerSwitch = 1; // reset values like it turned off
currentState = 1;
previous = 0;
engageCAN = 0;
}
}
// Current sensor?
if (steerConfig.CurrentSensor) {
sensorSample = (float)analogRead(CURRENT_SENSOR_PIN);
sensorSample = (abs(775 - sensorSample)) * 0.5;
sensorReading = sensorReading * 0.7 + sensorSample * 0.3;
sensorReading = min(sensorReading, 255);
if (sensorReading >= steerConfig.PulseCountMax) {
steerSwitch = 1; // reset values like it turned off
currentState = 1;
previous = 0;
engageCAN = 0;
}
}