Merry Christmas AGOPENGPS member and ESPrtk User !
We are very interested in SKYTRAQ products.
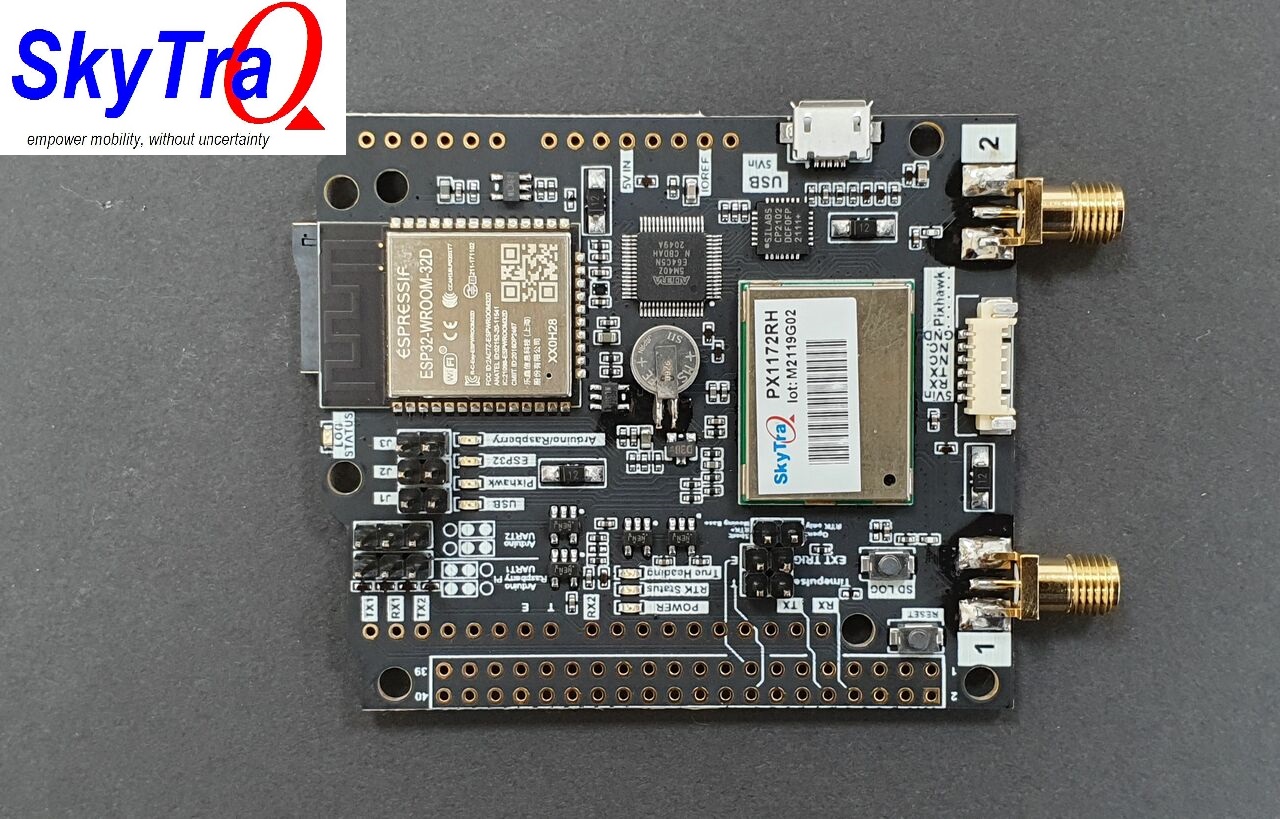
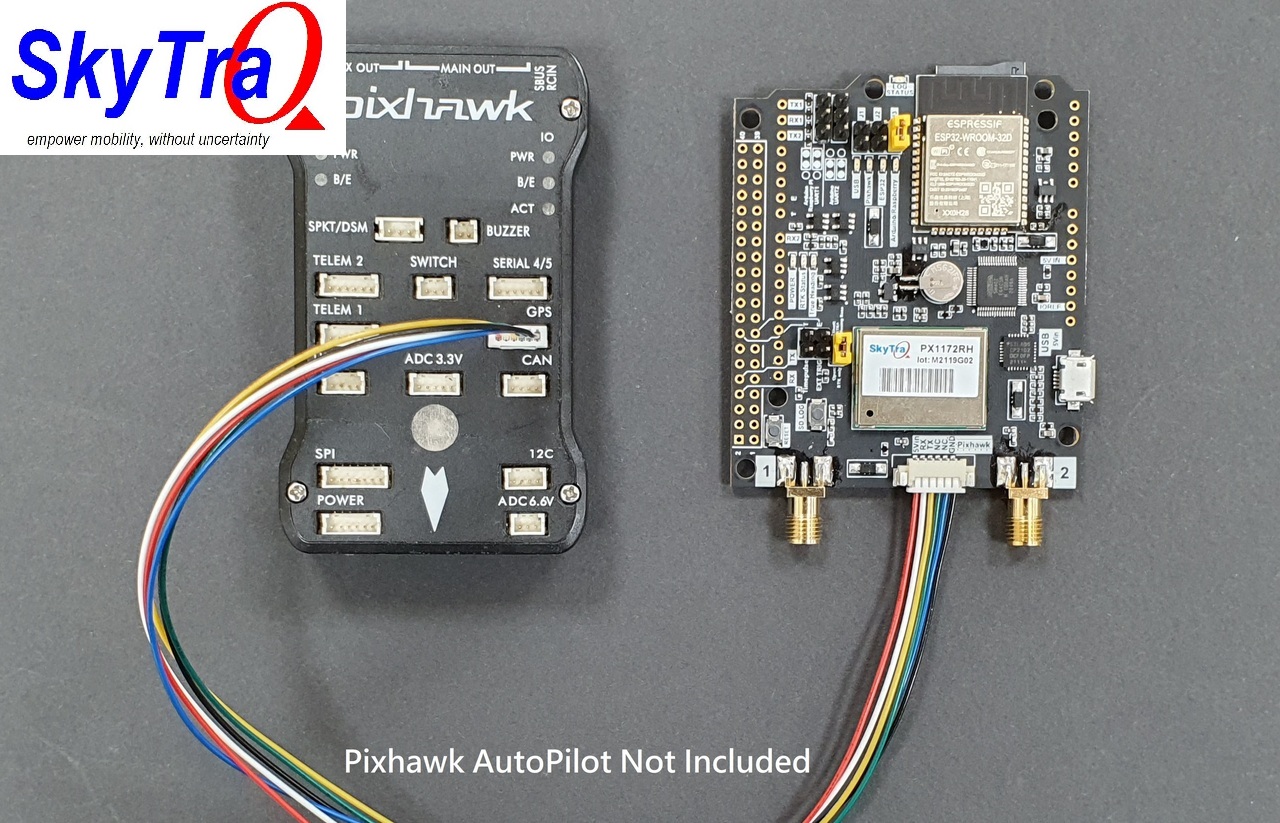
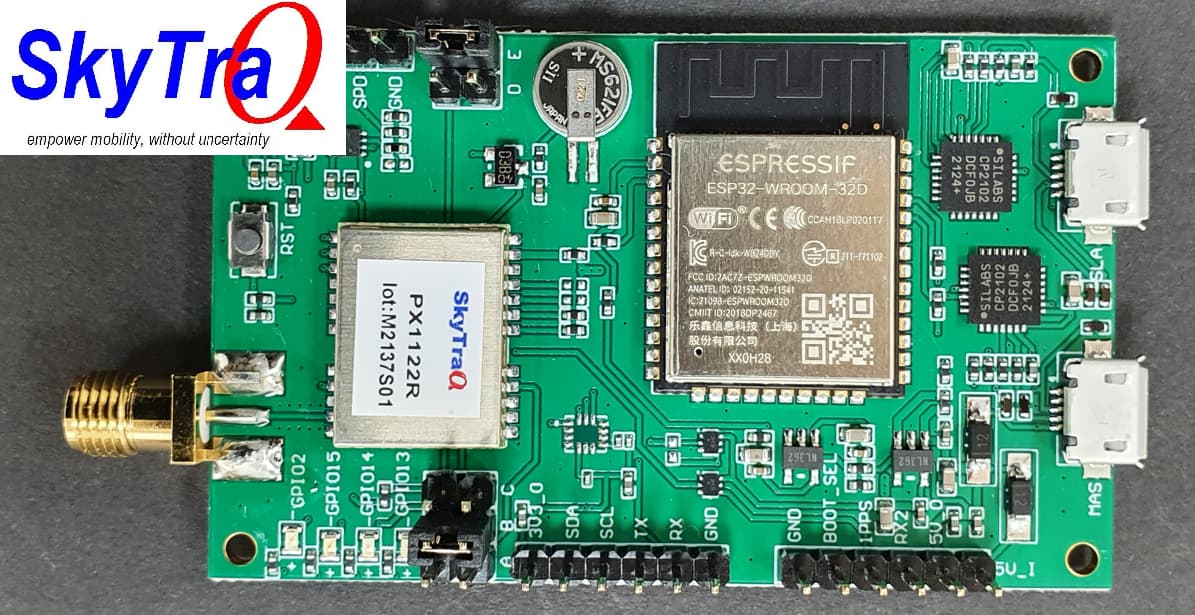
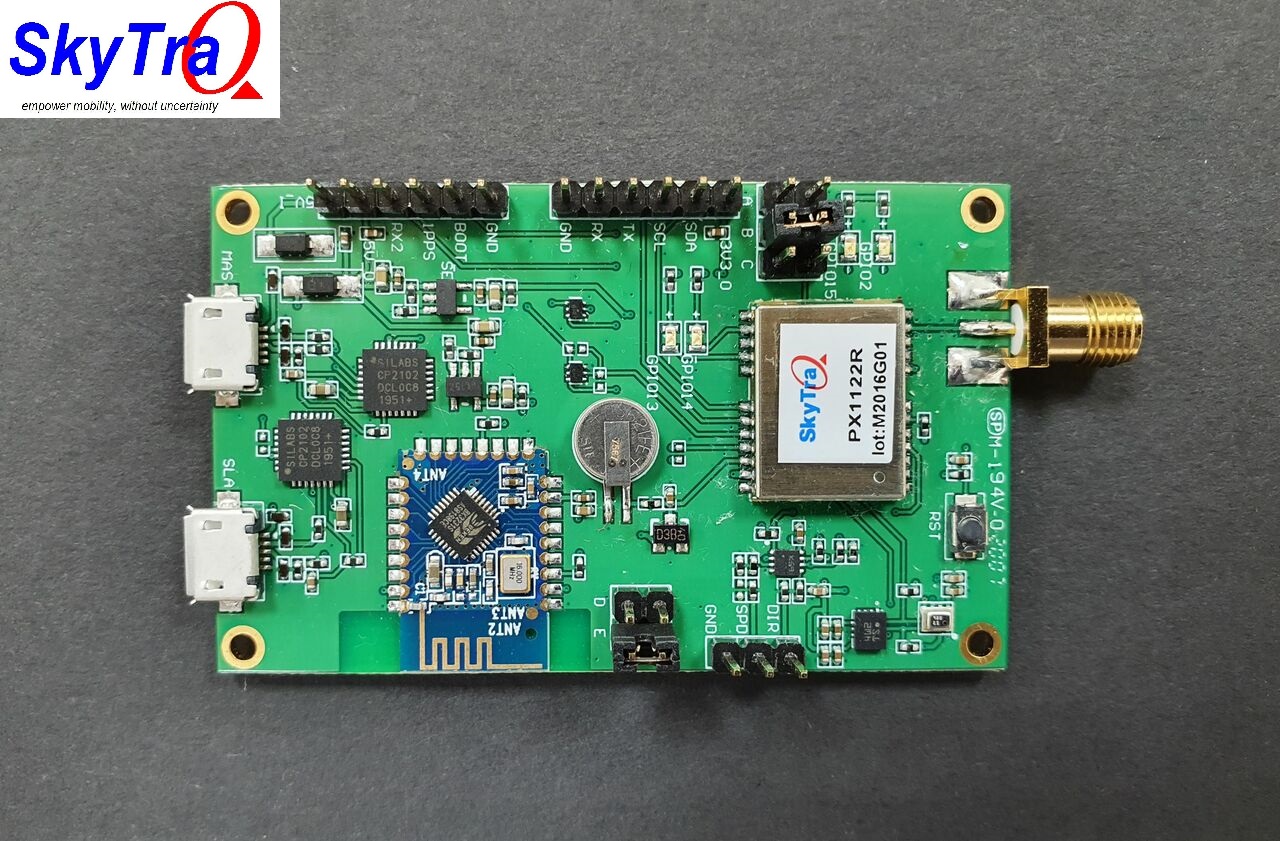
Today there is great news for RTK and ESPrtk users that SKYTRAQ has completed development and started selling the RTK PX1122R and PX1172RH boards that support the ESP32 module in their new product lines.
ESP32 is a very powerful module, it supports Bluetooth/WIFI, can be developed and used for RTK, NTRIP, CORS,AGOPENGPS,Drone…
I’m expecting that the Skytraq will work with the same messages that the F9P will. In other words my existing F9P base station should work fine with the Skytraq rovers.
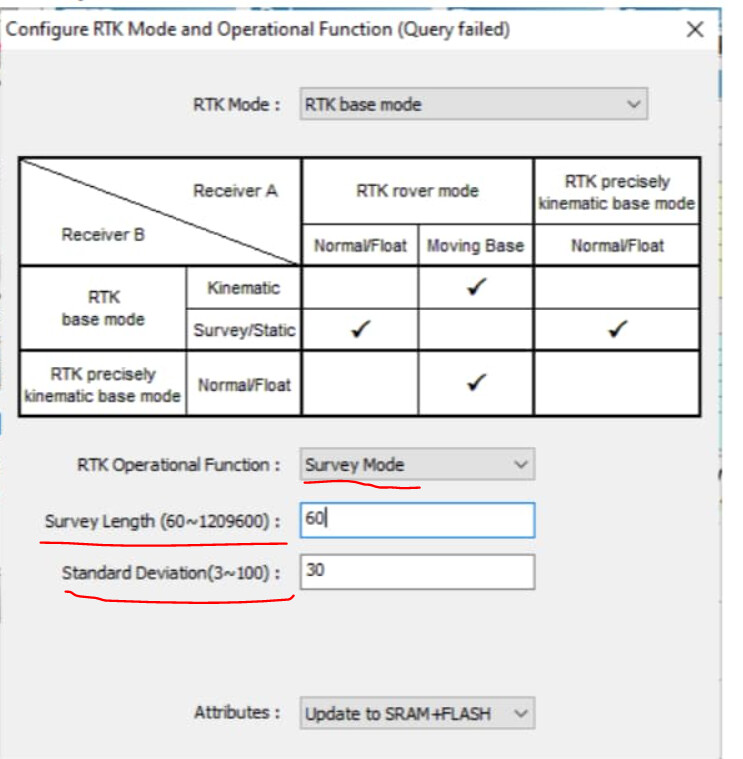
You can start with the survey in at 60 sec or maybe some minutes. It is enough to make it work.
Later you can set static mode, and do all the required stuff to get your precise position. (search survey in on this forum)
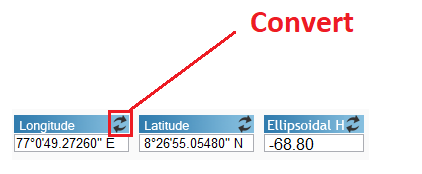
I found that you must remember to input correct type of coordinate and be careful about the comma or dot (depending on your language keyboard)
I use MSM4
These are the numbers I have put my ns-hp-gn2 (PX 1122R). Or actually what comes out from my RTK2Go caster
I only use GPS GAL and BDS , because that is what I have set my F9P rover to receive. (max 3 types at 10 Hz)
Depending on where in the world you live set the types with most visible satellites.
Base Mode Binary: 1 Hz and I think the other settings were also as in your picture
Forgot to tell that my base is in temporary spot near house and trees.
Thanks you so much torriem and Larsvest .
The PX1122R (and other Navspark products) is easy to use.
One thing to note is that if the mode is Base Static, the Lat and Long positions need to be set correctly (maximum error is less than 5m), otherwise Rover will not be able to have RTK FIX.
Hey fazm, your photo is quite complete.
What specifically do you want to set up? , I will guide as detailed as possible with pictures.
Thanks Larsvest, I’ve taken note.
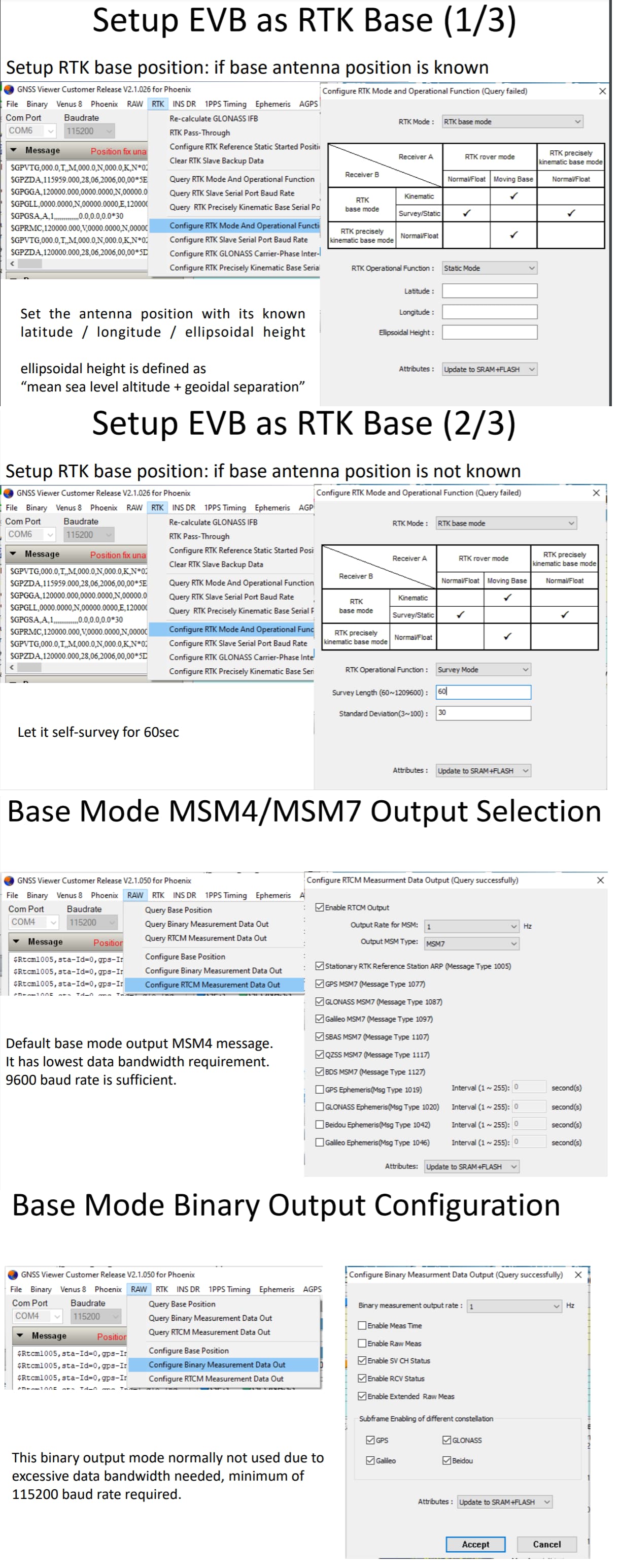
I set up my base station as shown in the photo, these photos are from the “Getting Started with PX1122R RTK Evaluation Board” manual.
I am currently making a communication channel for transmitting RTK corrections. I’ll let you know as soon as I get the results.
Maybe there are more detailed recommendations for setting up the PX1122R to work with the AOG as a base station and a rover?
That’s interesting. The F9P will achieve RTK Fix even if the base is out by 100 metres as I accidentally discovered last year when I moved my base station but it had cached the survey-in results and didn’t run another one.
I can’t understand the word “survey” because of my language, is it the exact location where we set up our survey base station to get the coordinates clearly and accurately? If I were to do a survey, what should I do, is there a video about it? The system I use is 2 simple RTK (1 base and 1 rover).
When setting the PX1122R as a Base station.
You need to set it up with a position with absolute precision (Latitude,Longitude,Height as Google MAP results or XYZ according to ECEF).
Nowadays, the coordinates returned by Google MAP are quite accurate with high resolution photos, < 1 m is enough for AGO.
It’s called “Static” Base mode.
But what if you don’t have a Google Map?
Now the PX1122R Base has a feature that automatically enters coordinates.
PX1122R will collect its position over a period of time (over 1 minute) and use algorithms to calculate and converge its approximate position.
It’s called Base’s “Survey” mode.
In both of these modes, the Rover’s relative position is always within cm accuracy. (coordinate system associated with Base)
But the absolute accuracy of the Rover depends on the absolute position accuracy of the Base (the coordinate system attached to the Earth).
The advantage of “Static” Base mode is that you can quickly set the Base position, but if your sample location source (eg Google Map) has low accuracy, it will affect the Rover’s absolute accuracy .
The advantage of the “Survey” Base mode is that it will give you a highly accurate absolute position of the Base if you set the convergence time long enough (usually in hours or even days).
The longer, the more accurate, and of course the disadvantage of this method is time.
To solve it, it is common to mark the surveyed points in the field and save its location information, when returning, one can simply use the “Static” Base mode to re-enter the location save before.
If you set up the Base Station Antenna for AGO and do not intend to change its position, then you only need to perform the “survey” mode once !
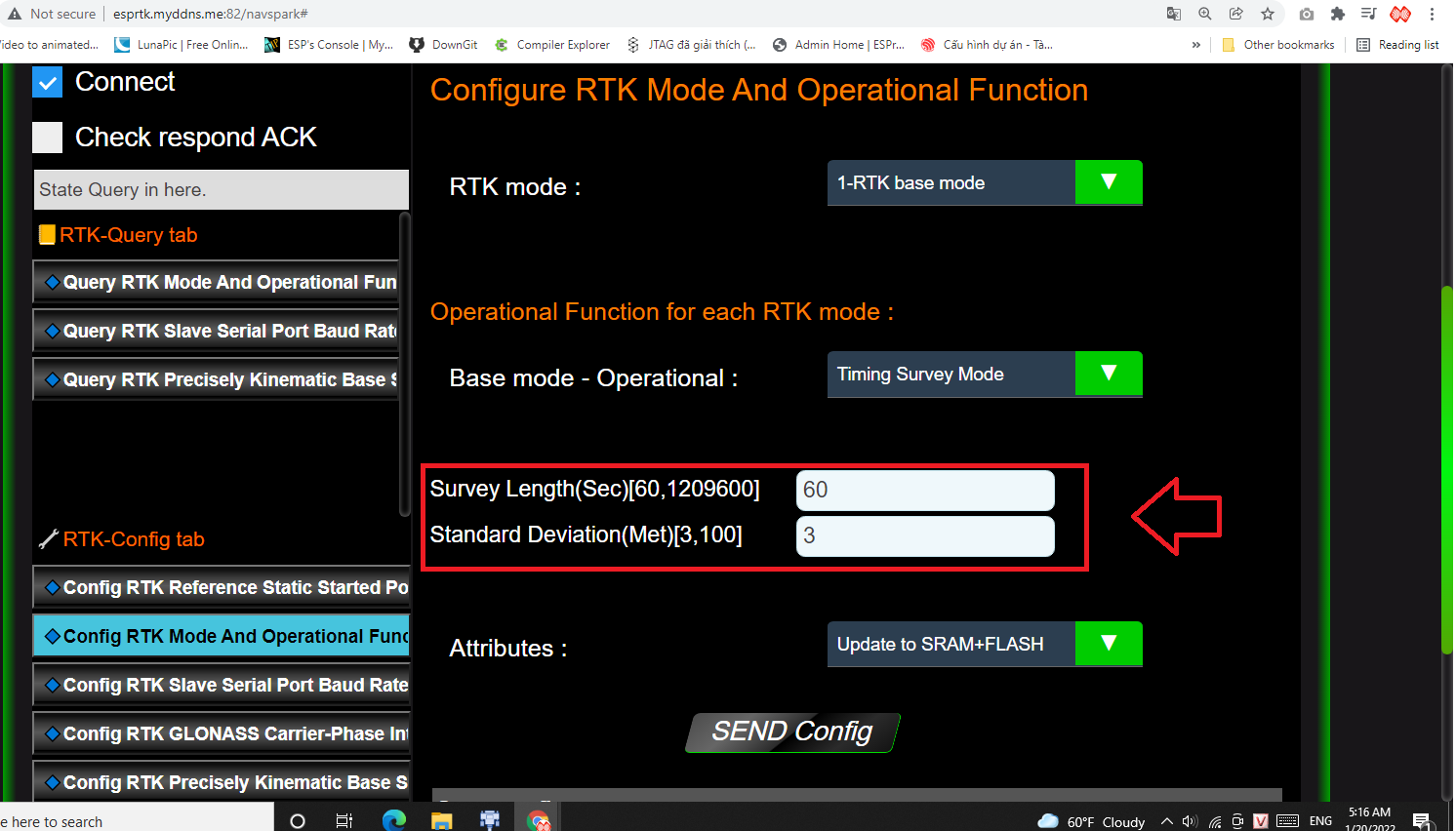
Is the location convergence time in Base “survey” mode.
Unit is in Seconds.
Range [60-120960] (14 days).
The larger this value is set, the more accurate the convergence point will be.
Standard Deviation :
Is a measure of the spread of values in a distribution and is calculated by taking the square route of Variance. It gives an indication of how much the values deviate from the Mean. Standard Error of the Mean is the Standard Deviation divided by the square root of the survey sample size.
Unit is in Meters.
Range [3,100] .
The convergence point will be locked only if the “Standard Deviation” value is less than the set value.
You will receive the current coordinates in the RTCM-1005 message.
Coordinates will be continuously updated in real time if PX1122R is in the process of “Survey” with increasing convergence.
Once the survey is over, the value will be locked and that’s the best value you can get.
Therefore, the optimal survey time is 1 day (86400 seconds) for a fixed-position antenna.
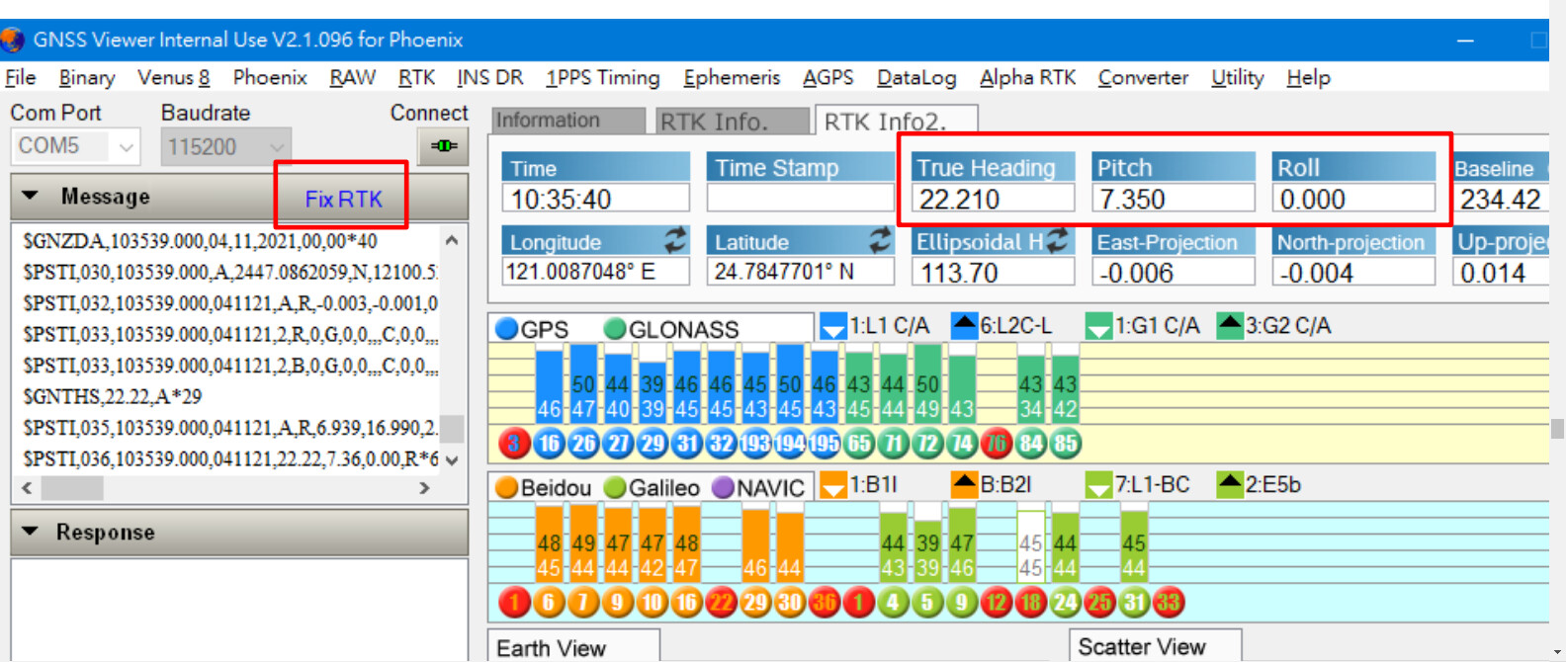
To view coordinates, You can use RTCM1005 (or 1006.1032) message analysis tools like rtk2go’s PFAT, RTKLIB’s “RTK monitor” tool or use GNSSViewer app.
Just received my SkyTraq receivers. They work quite well getting an RTK fix using my F9P base station. They seem to resolve quite quickly, on a cold start getting to RTK within about 30-60 seconds. Once a GPS fix is obtained, RTK happens within 10-20 seconds.
The PX1172RH is quite impressive, honestly. Price point is about half of a double F9P equivalent system. Absolutely no configuration is required, whatsoever. As long as two antennas are plugged in, it automatically goes into “heading” mode and reports a $PSTI sentence that contains the bearing (heading) from antenna 1 to antenna 2, the pitch, and roll angles. I’m not sure why it reports both pitch and roll since it can only really do one at a time. The GPS position will always be antenna 1, but it’s trivial to translate that position down to the axle using the pitch angle and the known distance between the antennas and the height above the axle. I will soon write some code to compute the compensated position and see how it looks. I might also compare it to the IMU roll value. It’s possible that with the double antenna giving us the heading, and the IMU giving the roll angle it might be more accurate. Vertical resolution even with rtk is never as good as horizontal.
I thought, in ago you can configure the high above the axle and the center line deviation for the heading antenna, so there is no need for extra compensation?
No. Like the dual F9P setup, all it tells you is the GPS position of the first antenna, the bearing between the antennas (tractor direction would be 90 degrees off of that), and the pitch or roll angle between the antennas. Unlike the F9P setup, there is no special configuration you need to do to enable the moving base stuff. It’s automatic. The PX1172RH also has the same limitation of 8 Hz update when using two antennas, just like the Dual F9Ps.
Do you know if the evaluation boards have any means of flashing the on-board ESP32? The ESP32 could do compensation calculations while still doing the bluetooth stuff. Or in your case, running esprtk on it.