AgOpenGPS
No WAS reading
Hardware
m_elias
17 December 2021 21:59
13
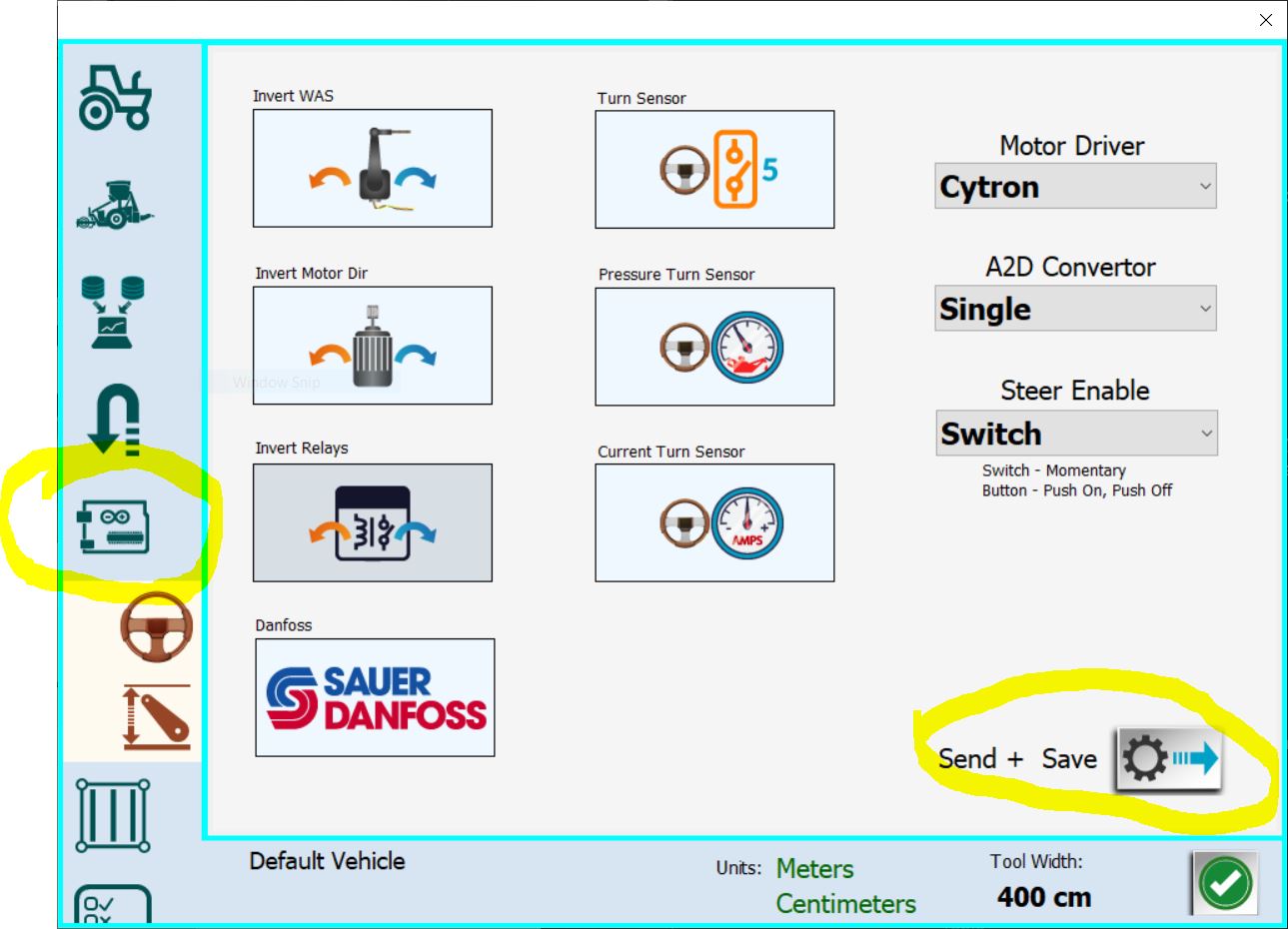
Capture
1289×930 106 KB
Setup and connection issue
show post in topic