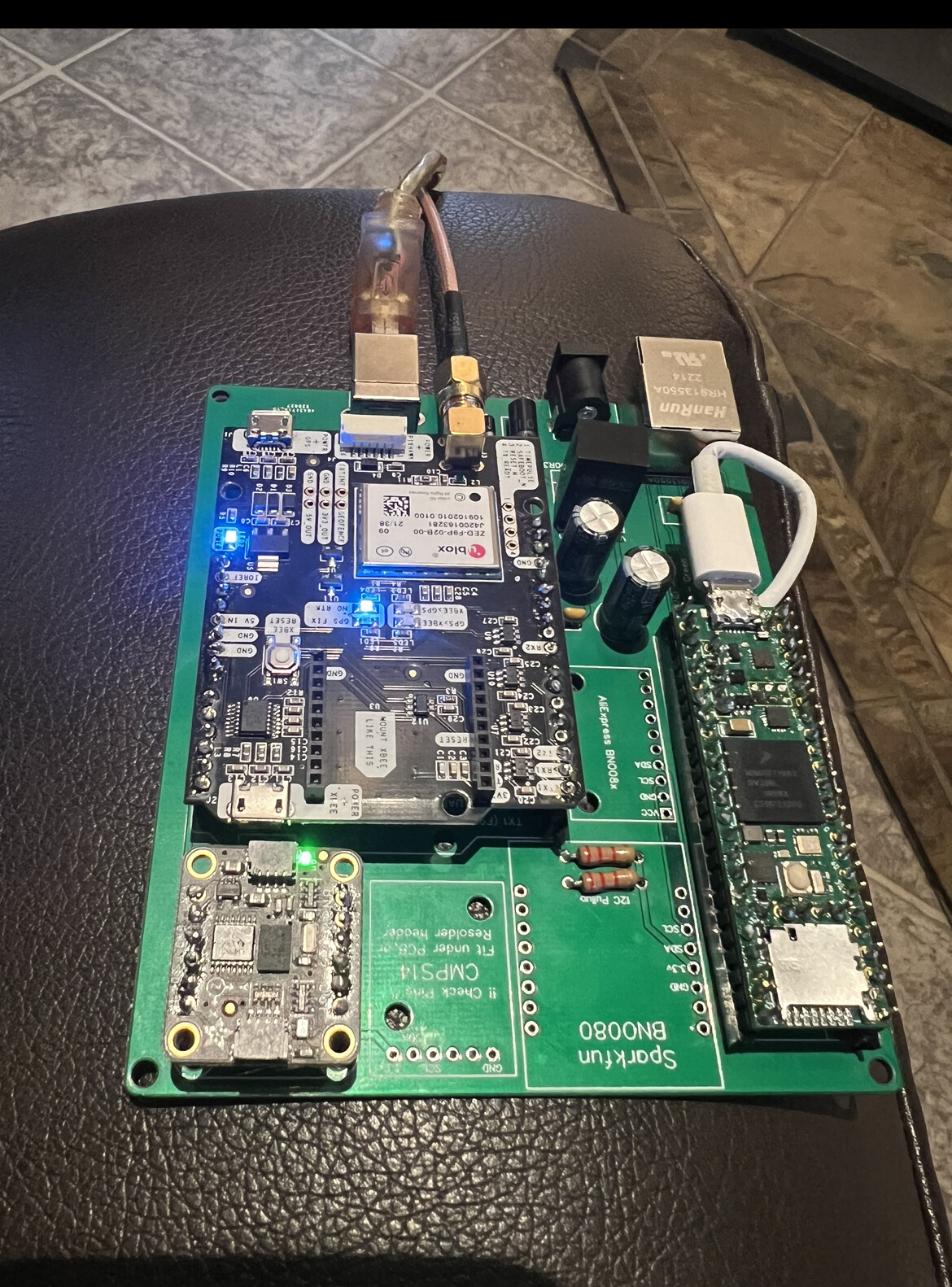
So built my panda board finally last night. Got everything hooked up and powered up and everything seems to be working. I attempted to load the ino files and things start going weird. Initially I tried the most recent v2.5 folder files but then down graded back to the 5.5 that seems to be more popular, regardless of the version I am getting the same issues.
- The teensy keeps dropping connection after the sketch. I have reverted back to the generic fast blink program using the loader and it stays connected to my computer no problem. But when I use a sketch from for AgOpen things drop off, constant beeping as the serial drops and reconnects.
- Probably related to 1, but I have yet to be able to get it to connect even one time properly to agopen,
- Not sure how to check if the teensy is communicating properly with the bno or the f9p. Hardware I can wrap my head arround. the software is where things get a lil tricky for me.
You can use v2.5 try using teensyLoader.exe to load them. Remove it from pcb when uploading. Easy test is to connect them without pcb and try connecting with usb.
Sorry, break it down like I am a child!
So I use the teensyloader and just program the hex file?
How do i test it after?
Basically yes. After that connect F9P and IMU to teensy as in that schematic. After that connect as any other module to AgIO (select correct com port in AgIO for GPS and 115200 baudrate).
Make sure your F9P is configured correctly, upload 1.32 SingleAntennaRover.txt configuration to it.
do I need to wire the components as illustrated if using the pcb and headers?
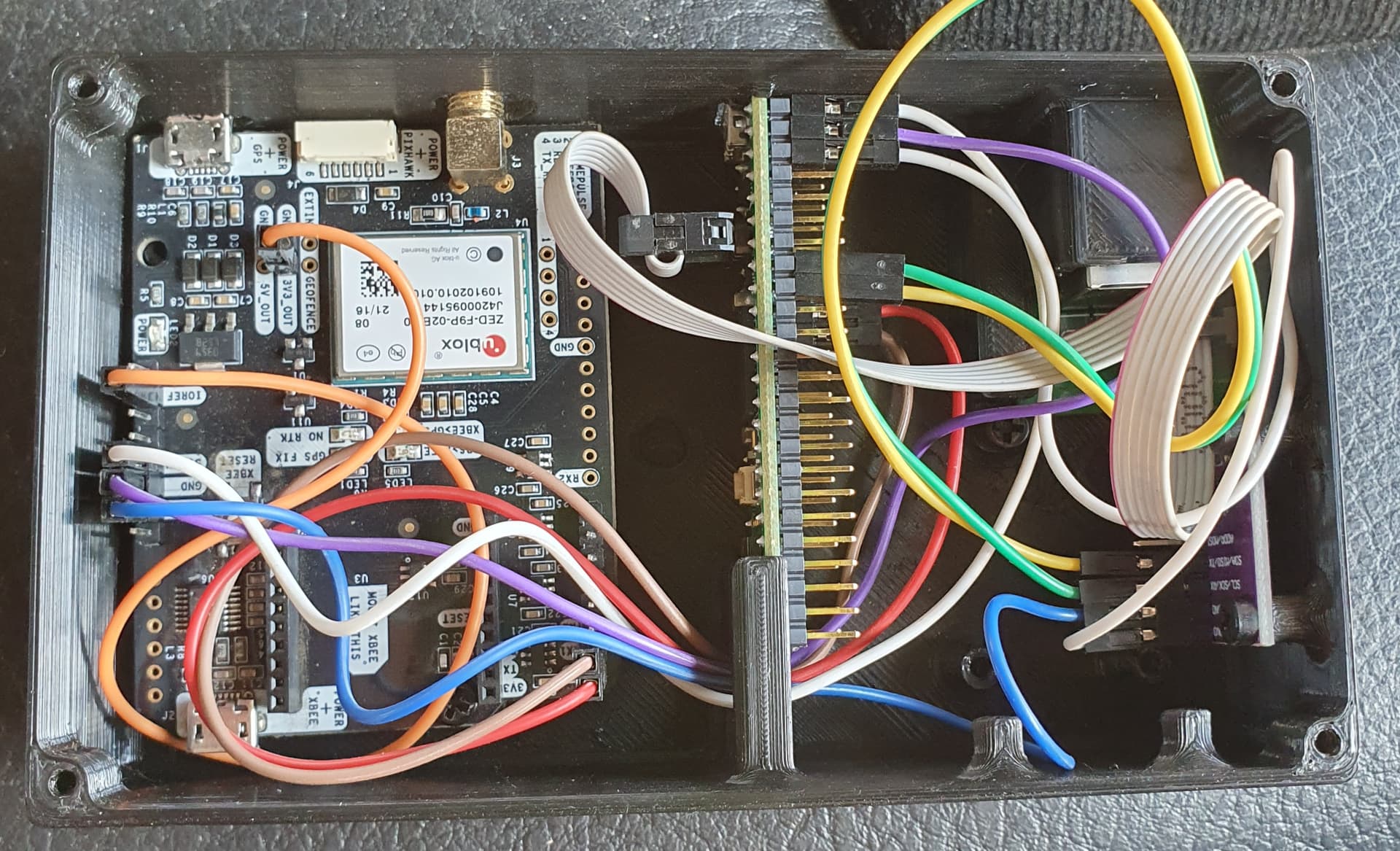
No, PCB is to not have to wire them directly. You either use PCB or bird nest wiring. Idea is to test them connected directly so you know if its problem in configuration or pcb.
If it works wired direct then something is wrong with pcb if not then its not configured right, after correcting configs, when you return to pcb it should work.
okay. will maybe have to try that tonight. cause i am getting nothing.
Shouldnt say that. Ag open recognizes the board on com 4 when i select it for GPS, but no idea how to test to see if its sending any imu messages, I cant get that part to show up at all.
If you testing in “real” mode then you have to have antenna outside to get position before aog shows that yellow gyro angle and/or GPS position.
Oooh kk, well i will try with my antenna tonight. I didnt have it hooked up, assumed i would see something regardless
If the Teensy is still rebooting (USB connect/disconnect sounds), then make sure you flash it with TeensyDuino 1.57.
We are making progress!!
I had 1.58 installed downgraded to 1.57 and flashed with the 2.5 sketch package!
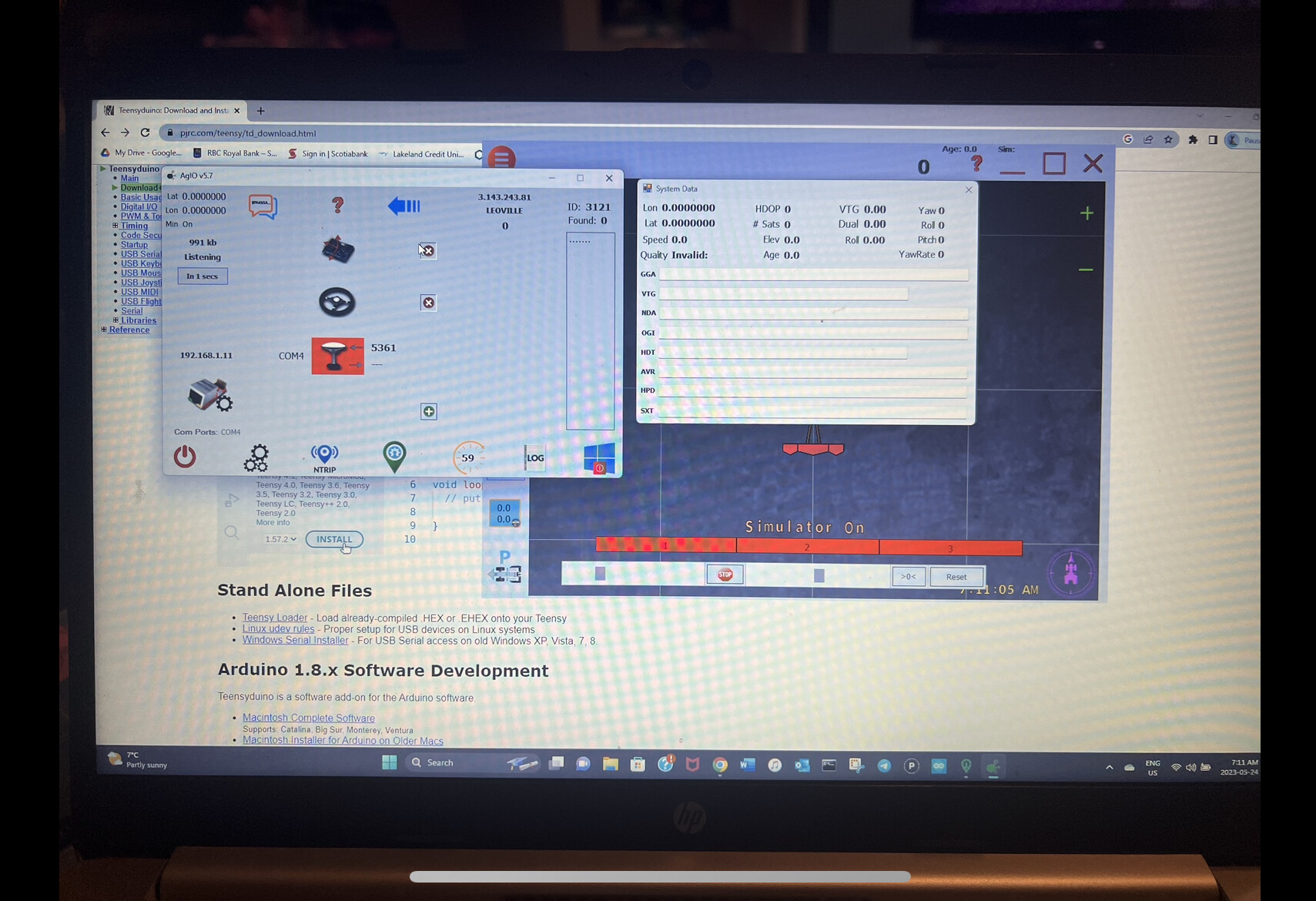
I am in SIM Mode, do i still need an antenna hooked up?
Should add, no lights on the teensy everything else is lit up though!
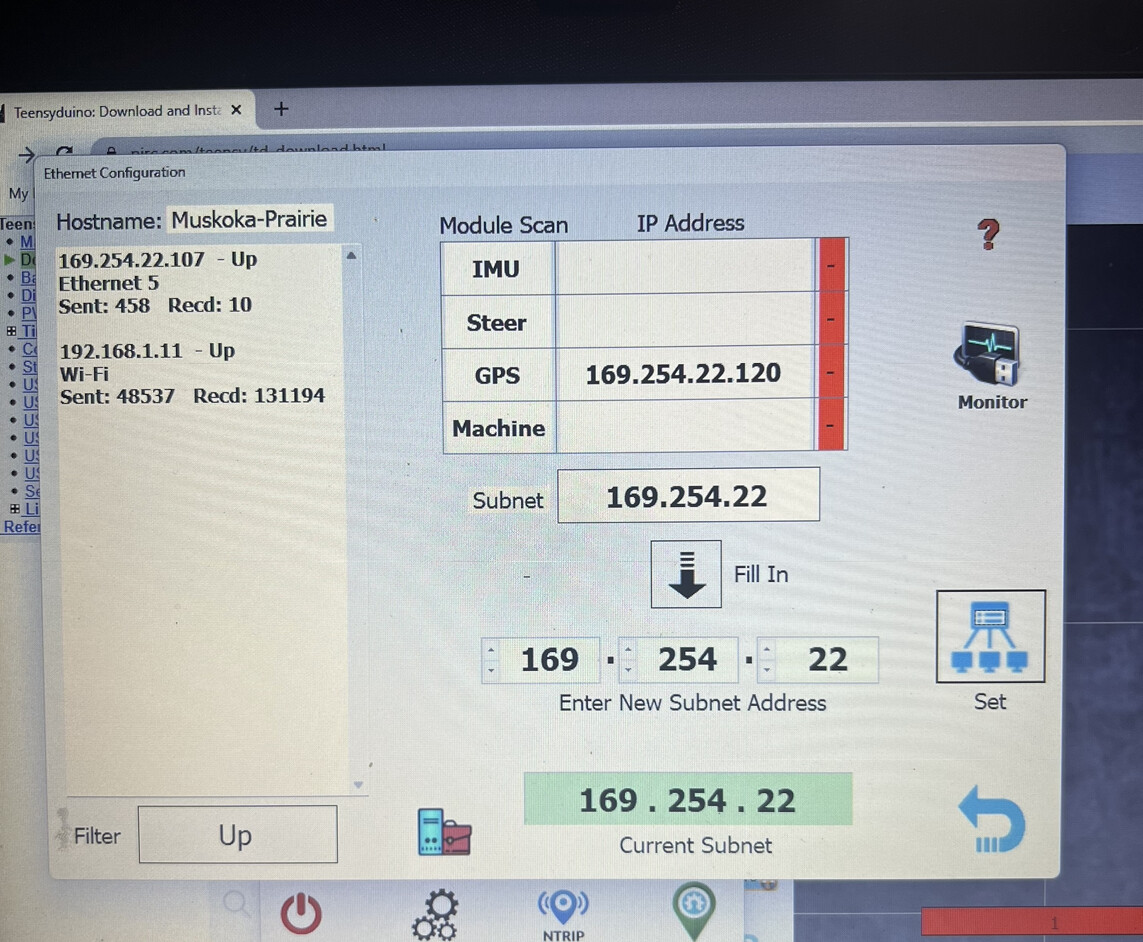
Hooked up udp and imu still isnt showing up…
Set a static IP on Ethernet 5 - it’s trying a DHCP lookup and failing, that won’t work. Follow the guide in the wiki.
Teensy will blink orange when antenna is connected to F9P and is outputting something.
BUT if GPS baudrate is wrong(must be same as INO expects), nothing comes to teensy.(and teensy does not send anything further)
Can someone confirm here, that auto swapping GPS input to teensy is working (PANDA board and AIO board use different RX TX input pins)??
On my single f9p IMU and teensy birdsnest I use TX1 from f9p to pin 28 on teensy RX1 goes to 29 I use the teensy INO that came with 5.71 (5.72)
Are you using 4.1 or v2.5? I use v2.5 and TX1 to 7, RX1 to 8 so it seams to swap.
None of them, it’s months ago 
But you confirmed ino for v2.5 is swapping, so @Keegan4123 is good to go , because he just said he flashed the ino for that one.
Okay so I evening update.
Plugged in panda board and the port was recognized as port 4 on usb, had antenna connected
However:
No usable gps signal made it to aog
No lights on teensy
Is there another way to test the communication?
No messages coming through on agio…
Left f9p on the board but plugged direct into micro usb and it is working and shows up perfect in aog
How do I match the baudrates?
In the ino you can set it, probably preset at 460800 but could be 115200
Same must be set for uart port you use on f9p.
I believe the latest autosteer rover txt file would use 460800 so inpur to panda calculations are faster.
You can set it in ucenter too.
I have not been on github lately to check latest board or f9pfiles.