I wish the code was anything even marginally decent and I’d be happy to share it but it is written in python and I have zero prior experience about python and still don’t understand many of the very basic principles.
If your fields are not not exactly rectangular but almost, I’d say the system works well on such fields but it has many limitations. The hardware is built to work on a Fendt, using the push-button control for external hydraulics etc. The user interface is from stone age, not at all scalable for different display resolutions etc. etc.
I could describe the main principles but preferably privately. Some I have already explained here, don’t think further details are of any interest for others at this forum.
Looks mostly the same as my Raspberry (including the “fan program” that I have not seen on other similar commercial tools) except that they mention ploughing contours. Then again, the word “contour” appears only once in the manual. Wonder what do they actually mean with it. I’d like to see an option to start from a contour and smoothly adapt to straight furrows, and most importantly the same “backwards”, starting from a straight furrow and finalising ploughing gradually to a contour edge of a field.
Isobus sounds nice but seems it does not work completely within a stardard isobus virtual terminal. Wonder why not.
Trimble use a Switch on plough head to know if its right or left. A linear potentiometer to know thé width of plough and thé cross track error from autosteer
Sorry, cannot interpret your comment completely. Which Trimble product are you referring to? Or do you mean the Track-Control product that runs on a Trimble screen?
I believe we all need a sensor to detect which way a reversible plough is working as well as the width sensor. How could it work without a plough width sensor?
They put a linear sensor on hydraulic cylinder to know exactly thé width of plough. With a trimble screen they use cross track error message to know how Many cm they need correct and trimble command hydraulique. For side, they put a Switch on rotative head to know wich side you plough.
Edit 2: I read all posts again, so must admit this is almost same idea as I wrote in March.
I have an idea. Last year I was plowing for a neighbor who had a variable plough, and a SBC GeoStar 200, autosteer system.
Plough was hydraulic variable by manual control.
When tractor was set to steer 10 cm from edge (middle of furrow) you could keep a straight line by varying the plough width.
So here is my idea:
You need one WAS on plough (linear potentiometer or same kind as WAS on tractor)
One Reed switch to detect if plough is left or right (magnetic hall or inductive sensor, or even mechanical)
One potentiometer to finetune how far out, (or control middle position) you want the plough when driving straight.(could be left out)
One arduino Nano (or something like that) to load a Ino program to.
One 4/2 valve and a cytron driver to control it.(or 5/2 if you have Ls)
You then use the WAS reading from tractor to add more or less width to the plough. (it is almost like the crosstrack error idea) If autosteer wants tractor to go towards onland the ino should add width to plough.
And the switch tell the ino to invert signal from tractor WAS when changing direction.
The ino (which I do not yet know how to write) should compare the signals from the two WAS sensors, and if they ar not equal then activate the 4/2 valve (by cytron) untill they are equal again.
The extra potentiometer should tell the ino to change where the middle input from plough WAS are.
Edit: forgot to mention a detector that turn off the autowidth when plough is lifted at end of furrow
This is not far from what I’ve chosen to do. I read the rear lift status from the standard 7 pin implement plug. Seems though that you don’t consider the “fan mode” as Track Control describe it. AOG currently does not support that kind of AB-line mode and I don’t see much use for it except for ploughing wedge shaped fields.
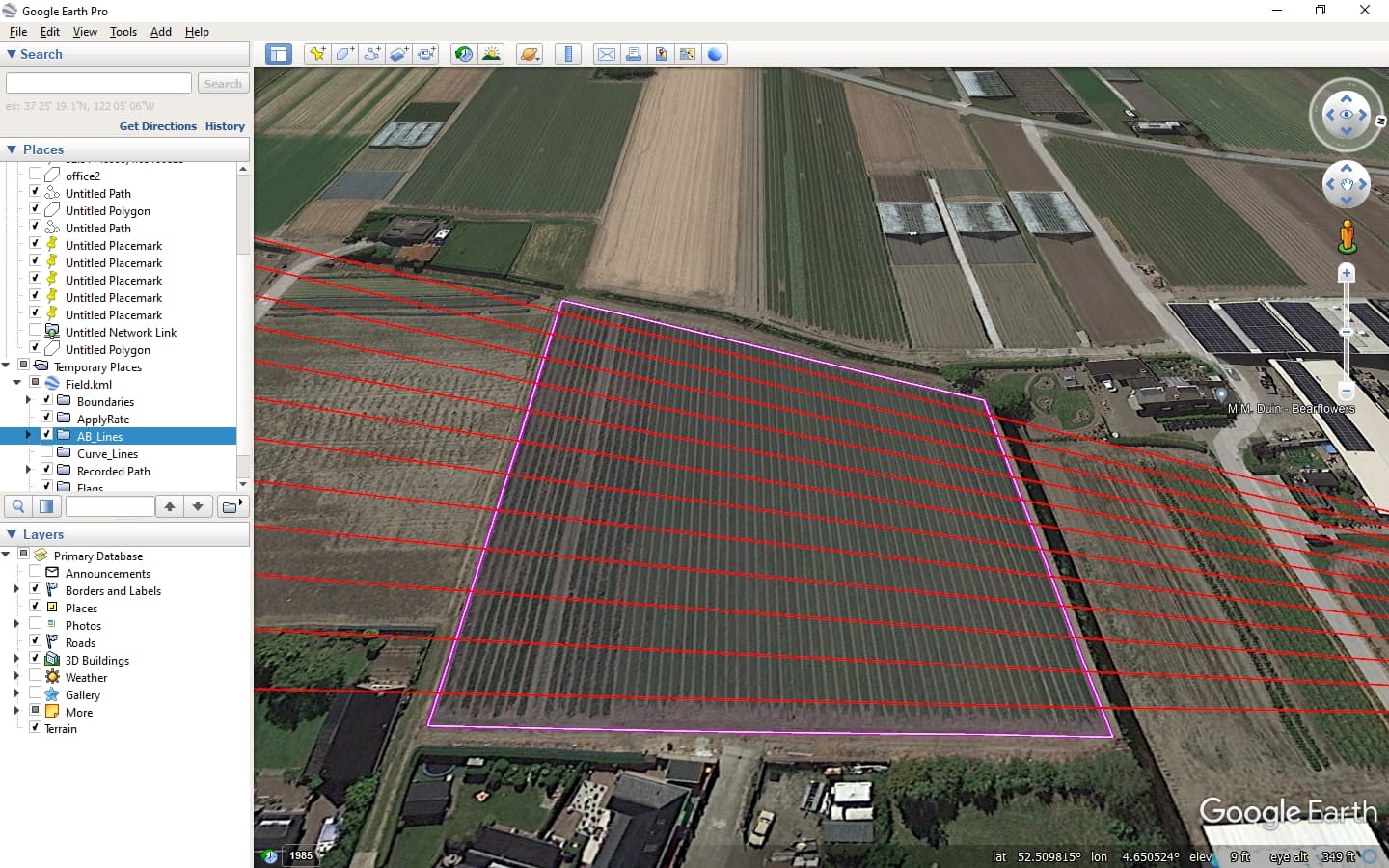
To ease the operator task, I start with recording 4 AB-line points, one AB-line at each side of the field. The plough control program can then calculate the optimum plough width that gives the correct number of waylines from the starting side of the field to the finishing side (including the case of wedge shaped swaths for the fan mode). The operator would not need to adjust the working width to exactly reach the end of the field with full plough width. Ideally something similar should exist for contour type field edges but I have not implemented that.
My dad still wants to steer his tractor. Naturally he is off the line a given amount from end to end. If the error is toward the leading edge, it is not a big problem, it just gets covered twice. However, if he has left a gap and continues to follow the ABLine that gap will just be missed. What I did to compensate is to build an adjustable ABLine. At the end of the row when swapping ABLines the error log resets. As driving to the end of the field, the error log records the maximum right and left error. Upon the swap to the new line, the ABLine is automatically shifted to the max error and at least he has a straight line again.
I think this has some relevance in this feature. Flatting the curves. Set the max left or right shift and each pass gradually “eats off” the bumps and still drives the valleys. This continues until there are no bumps or valleys and you have a true ABLine. But what about curve to curve. It would have to divide the field up into grids. Curve 1 start is on the same line as Curve 2 start. Also ends, middles, quarters, eights, etc depending on how aggressive you wanted to get. The largest connecting line is the bases for the tool width division. The other connecting lines would be the same number of divisions, just different tool widths. New ABCurves would be built based on these new line grids. The curve may need to store the tool width in each location or, how far away may could calculate on the fly. Just food for thought.
Could that be done with the feature (using the feature) in AOG, where you alter the AB line by typing in the degree?
And as you describe 4 AB points and a program part in AOG that divide the field into correct amount of AB lines, considering min and max width of plough. (Degree of first AB minus degree of last AB, divided to X amount of lines which each have their own degree.)
I have absolutely no clue how to program that (tried two years ago with the AOG program, but decided that was out of my reach / not time enough)
What is “geoplough”? The Track Control product as referred above or something else?
Makes it easy if the cross-track error is available from the navi controller. Probably not a solution for every commercial system but could be available from AOG. But doesn’t that mean that the screen should handle “fan type waylines”? Never seen any commercial system do that.
I did not find their manuals, do I interpret right that GeoPlough “only” works with parallel AB-lines? Not clear to me if it can handle a contour start with more than a plough width “error from a straight AB-line”, at least not that in reverse, i.e. when approaching a contour field border.
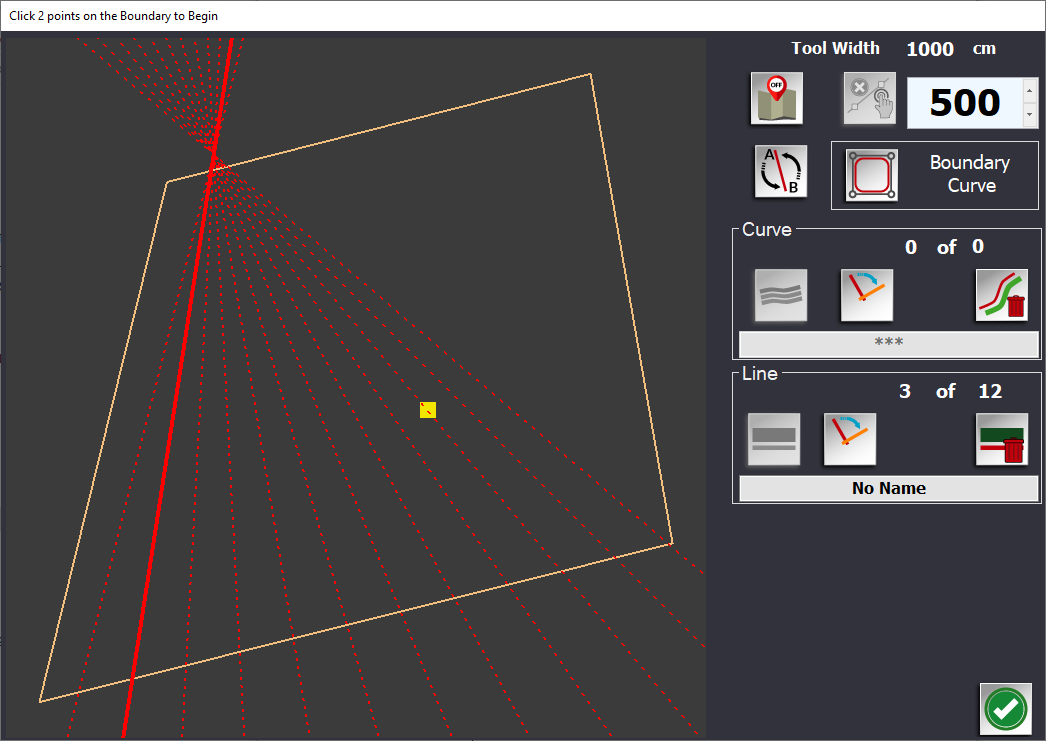
Fan ABLine function has some progress. This takes two ABLines and finds the max distance at the boundary and divides this into a set of max tool widths and then fans new ABLines to meet the other line.
Just wondering if it could. It can. Quite buggy right now, but it has some possibilities. Right now, it makes new ablines so u-turn and lateral skip does not work.