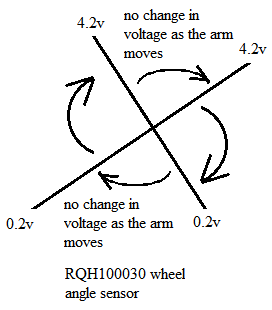
Esto es como lee tu sensor máximo 90 grados, es un efecto HALL
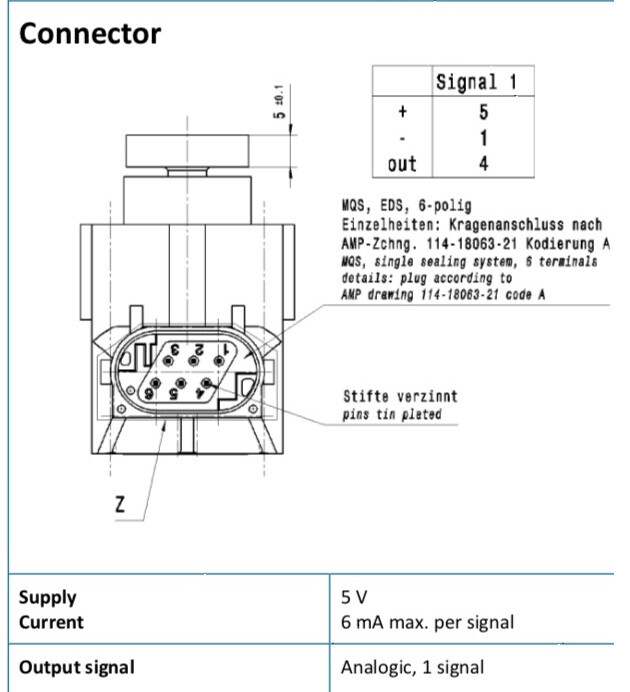
Encontré esta imagen de conexión, podrías decir como lo tienes conectado, ya que parece que tiene doble salida y a lo mejor esta mal conectado, otro problema es que no parece segura esa conexión compra un conector pq si tienes un pin flojo va a variar el voltaje.
90° Max
I found this connection image, could you tell how you have it connected, since it seems to have a double output and maybe it is poorly connected, another problem is that this connection does not seem safe, buy a connector because if you have a loose pin, the voltage will vary