Hello all,
now my system seems working.
Short summary what i did.
I ordered the PCBs at JLC due to the guideline: (small hint, directly order the Hammond enclosure cover also at JLC (topic comes below))
I used the standard one. Cost about 280€ for 5 pices (including Tax).
I only had 5 components what i had to order by myselfe. (They were not available directly at JLC).
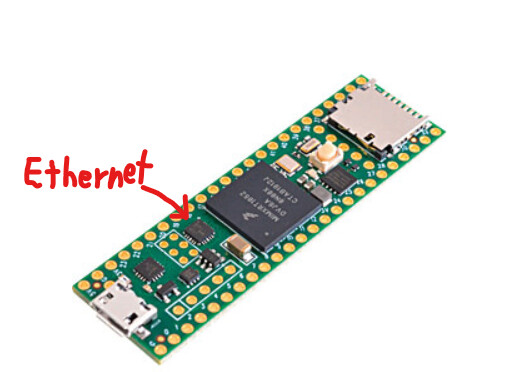
It was a 5V LDO, the BNO0085 and a 5V DC/DC Module as well as the F9P and the Teensy 4.1.
As hint: You need to order the Teensy 4.1 with Ethernet (the small marked chip needs to be assembled, there are versions with and without ethernet available)
(Consider also directly how to connect the 2x3Pin with 2mm pitch, i used a pin header soldered togeter, but this is not good solution, there are available conenctors and pins but i was not able to find them first)
Regarding BNO0085 i attached it in that way that the x axisx arrow is showing in driving direction. I glued it on the PCB in the right orientation, due to the fact i placed the PCB vertical. I do not know if it will work if attached in other directions.
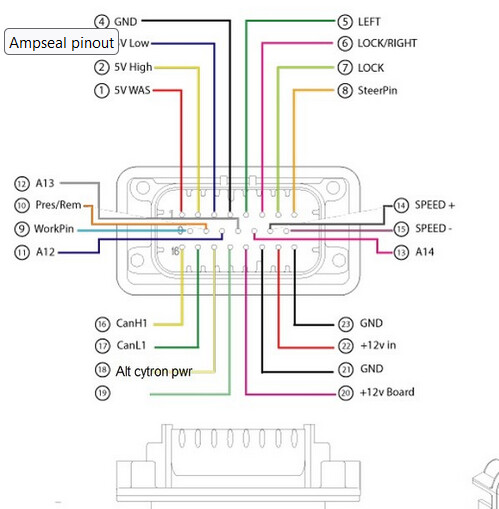
The Ampseal connector i baught at aliexpress (23Pin version with already attached crimped wires) (10€). (Number 770680-1)
As enclosure i used the everywhere mentioned Hammond casing (1455Q2201).
For this i ordered also at JLC the Faceplate with the connector cutouts. See Link:
As wheel angle sensor (WAS) i used the RQH100030 (Landrover) from eBay. (~27€)
This can be directly connected to the Ampselconnector.
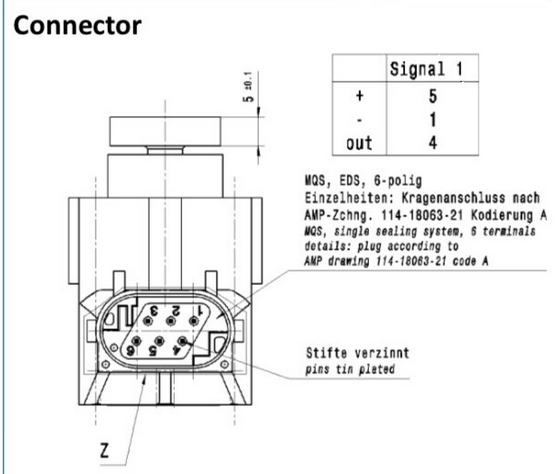
See Link for Ampseal pinning. (Hint: for WAS Sensor Pin 1= Supply, Pin 2 = Signal, Pin 4 = GND)
For my 312Vario i used self 3d Printed parts form this Link. Fits quite well. Only the screews need to be ordered due to the fact they are mostly not in standard portfolio.
Fit quite good. (Hint: you have to remove the Steering Wheel to assemble the gear)
Flashing was done with the available Tools. This i can describe in another message.
Hopefully i noted the most things.
Generally if I would by everything
Some pictures:



