Your antenna is OK placed there.
Teensy, try reading from here: Combining Single Antenna GPS + IMU - #67 by nut
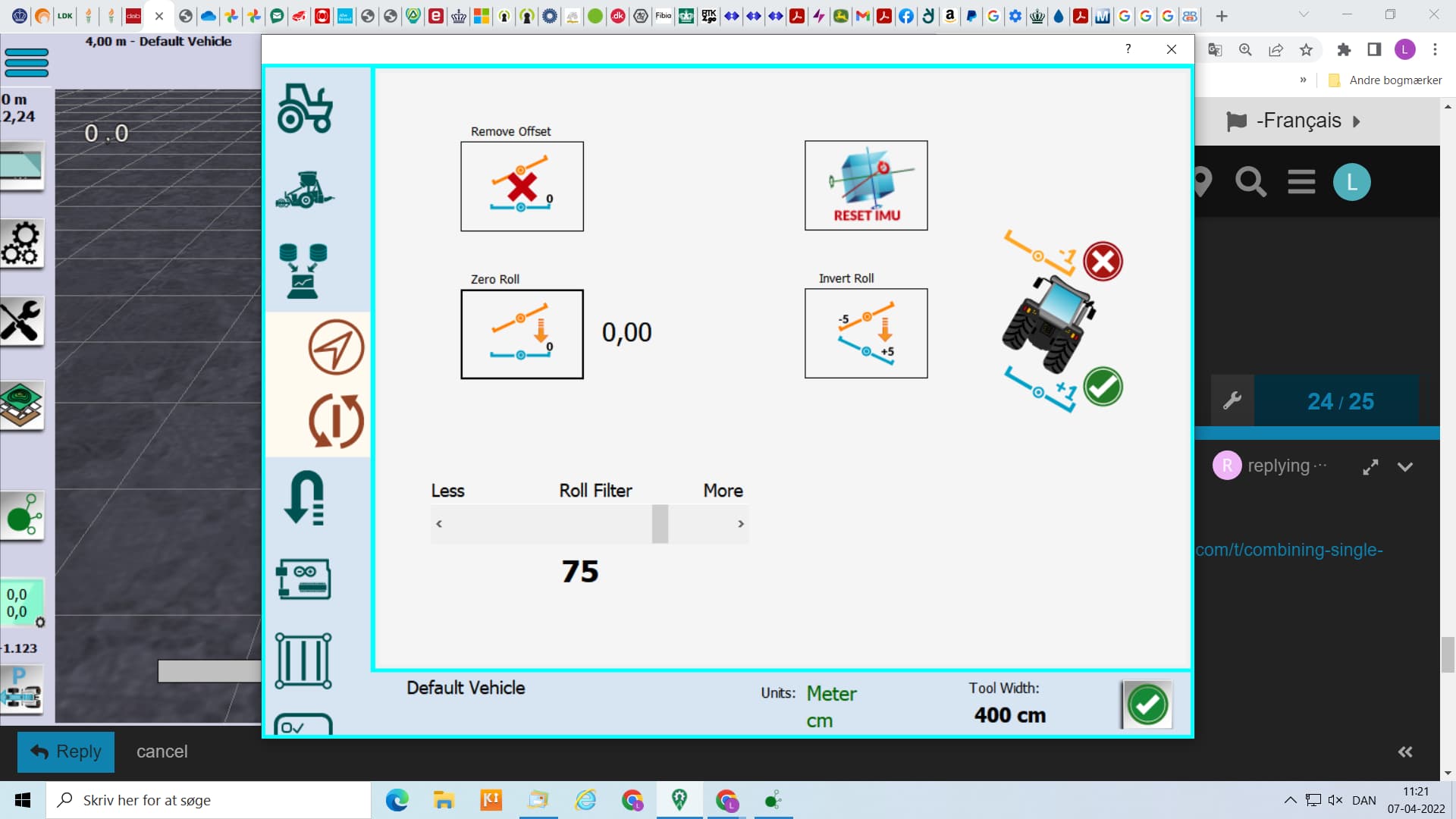
Roll filter here:
Your antenna is OK placed there.
Teensy, try reading from here: Combining Single Antenna GPS + IMU - #67 by nut
Roll filter here: