Just saying to try stanley. It will eliminate some variables. If it is still wrong in stanley, then its probably was set up or motor speed. Stanley, I find useless for uturn or lane shift. PP, in my opinion is the proper set up, and closer to pivot axle, minimizes a lot of the over corrections while figuring out the settings. If you have a set up that works, let’s log it.
I used stenli and it turned out decent, but it was 4-8 cm from the straight line. The GPS antenna is mounted on the roof. Should I move it to the front?
I will list what I think is a problem:
-
RTK varies. I stopped and watched several times. My position changed by a few cm (between 1 and 6-7 cm), and the IMU showed the same value. When I set up the simpleRTK2B base station board, the antenna was in the yard and now it’s on the roof, but I didn’t adjust the position. I just mounted and turned it on. Works for more than 24 hours. Do you need additional positioning, point averaging or something like that? Can I measure the accuracy of the signal in the tractor, 1 cm or 10 cm?
Attaching photos:
https://photos.app.goo.gl/nKa9VjSq4pDqM5nZ8 -
The compass is mounted in the MMA slot of the PCB, the box is not fixed. With a stationary tractor, when the box moves by half or 1 cm, I get a deviation of 1-4 cm, even if I press it lightly with my finger, I get a deviation of 1-2 cm. I assume you have fastened your boxes with screws?
-
This point is similar to the second, but there is another thing that worries me and that is that my cabin has a suspension. I made an attempt by slightly shaking the cabin when stopped and got a deviation between 2 and 7 cm.
-
I just noticed it. When I stop and open Auto steer configuration the window in its lower bar has 3 values "Set: Act Err:", so when I stop the value “Set” changes. I will attach a video to see if it is normal.
https://photos.app.goo.gl/berNp4cuLxhevKsN7
The best that appeared on the screen was 4-10 cm from the straight line, as the tractor meandered now 4-10 cm to the left, now 4-10 to the right. This happened with Pure pursuit and Stanley
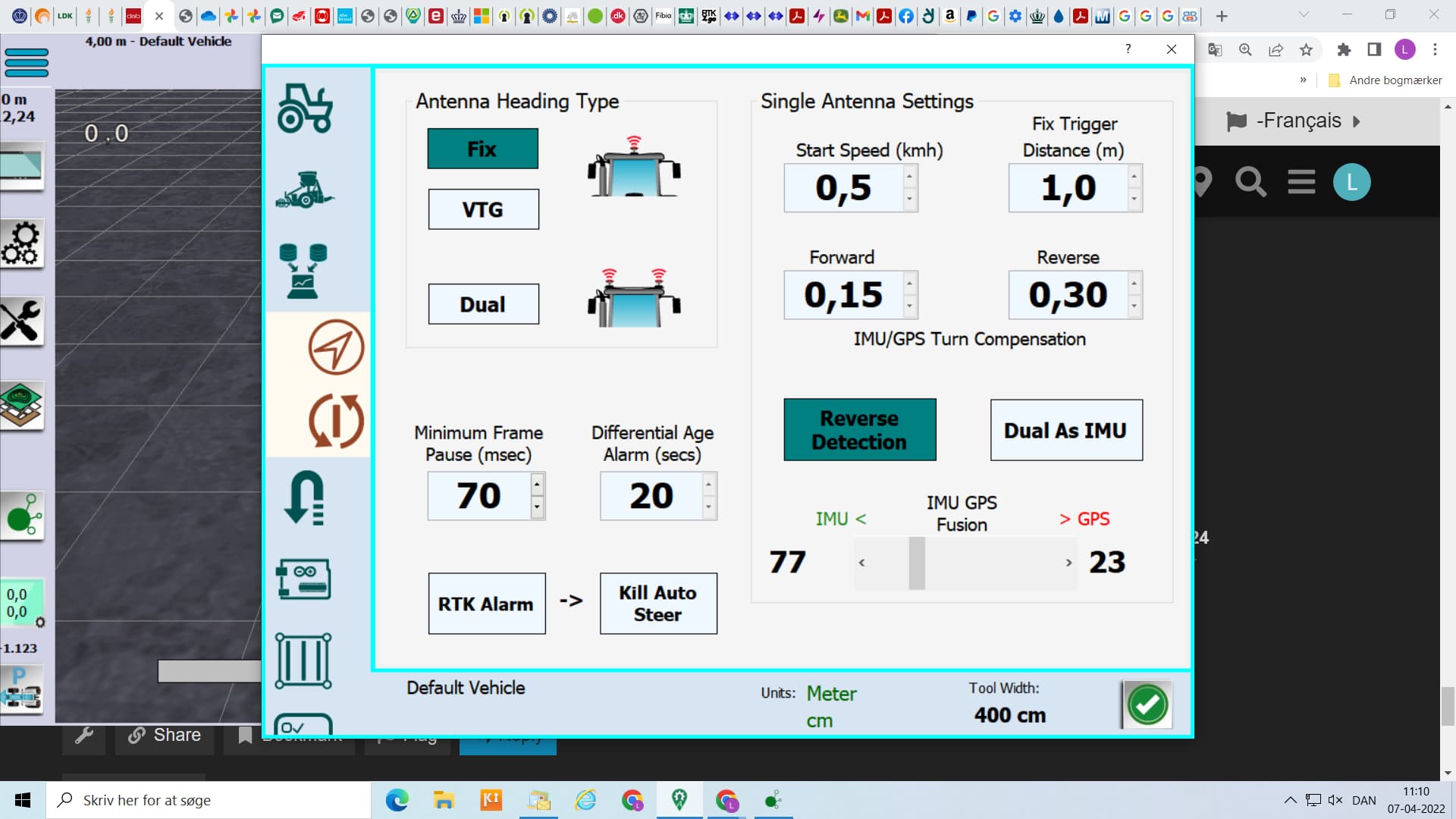
To eliminate influence from roll but still use imu for heading, for start up and testing, then just set antenna hight to 0 m
Do your Base do automatic survey in (at least 3 minutes) at every start?
If automatic survey in, then it is OK to move the base to other position.
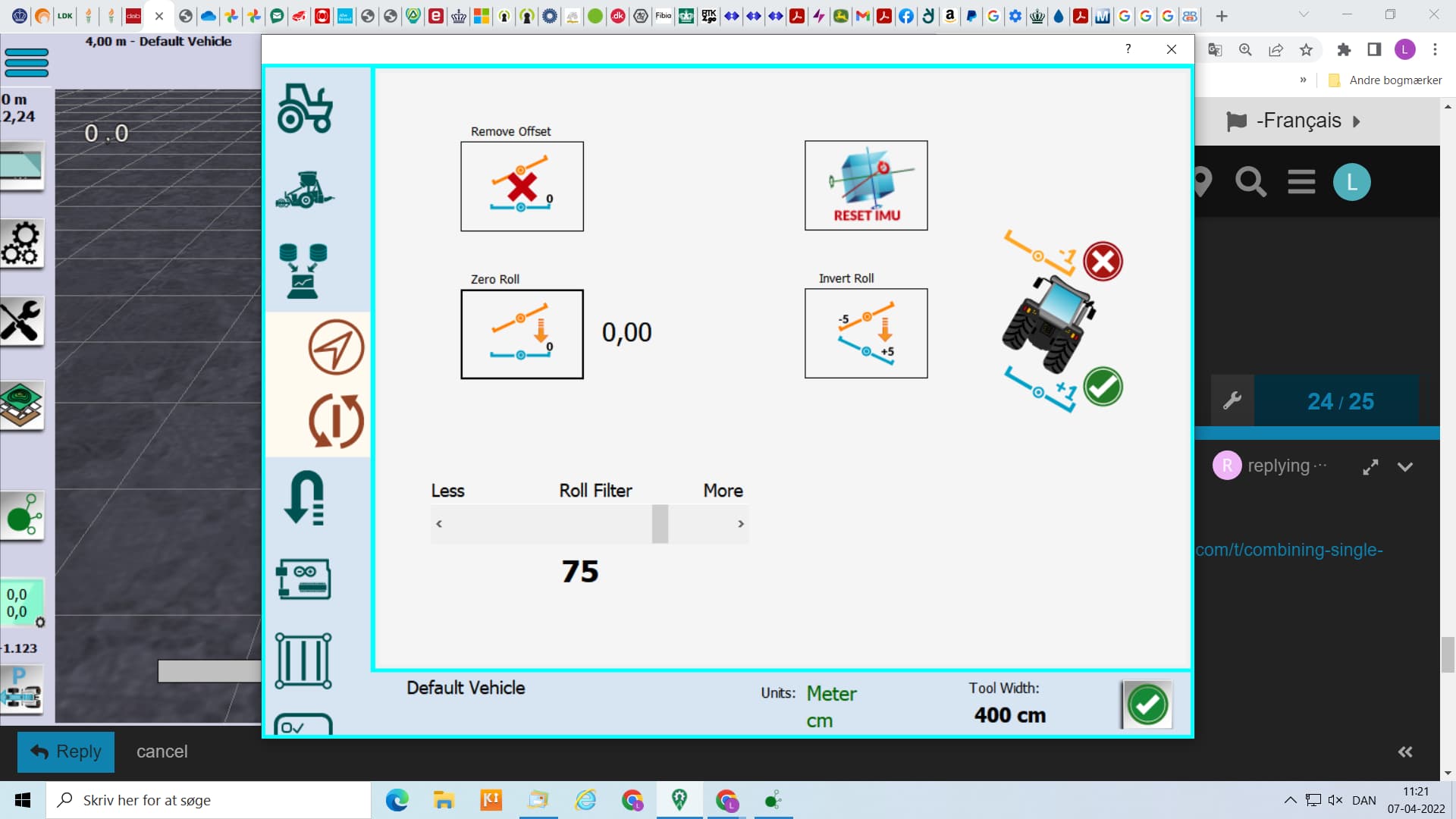
ALSO roll must be filtered a lot until you use the Teensy way of combining GPS and roll
1 Like
Is that ok?
https://photos.app.goo.gl/PcBcZ4j6AZ5QCcjEA
I have to check this.
I appreciate the help and I am grateful, but I do not have the knowledge to understand what you are telling me.
My antenna is mounted 1m below the highest part of the roof, and the highest part is about 6m away from the antenna.
https://photos.app.goo.gl/V7KJivNSiib12nxw7
Your antenna is OK placed there.
Teensy, try reading from here: Combining Single Antenna GPS + IMU - #67 by nut
Roll filter here:
1 Like
Are the loose box and the movement of the cab a problem?
If your base is auto survey you can move it but every time you have to wait for specified amount of time in survey in config. If you will use only AB line and don’t care about repeatability you can leave it like this if you fix position your AB lines will stay in place relative to base.
For cab suspension.
Teensy 4.1 will replace nano on PCBs in future.
Yes 1 deg of bad roll is ~5cm error on 3m antenna height.
4 Likes
So now I tired field test about 10 to 15 kph and can’t get straight line. Terrain is quet bumpy.
Look ahead 2.9
Gain Look ahead 1.9
Fusion 51%
P 100
Motor max 187
Low Motor 93
Min Motor 49
SideHill 0
Integral 10
CPD 96
Acker 109
Max steer 38
Roll Filter 34
Tried higher gps fusion then it worked better for short time but every 20sec heading jumped and tracor went far off line.
Tried alot of settings full circle, what settings affect uneven terrain and higher speed? Maybe lowering antenna to hud and stanley ?

Results of settings.
Ok assuming you are using RTK,
The first thing I would look at it is integral leave at 1 until you are mostly happy with flat land performance.
Next look ahead.
There is a low value that oscillates as shown in your picture eg 2.2 and a high value eg 3.0 too high or low its the same. Usually the sweet spot is in the middle of the high and low oscillating value.
I would lower it by 0.1 do a pass, lower it by 0.1 do a pass. Fine tuning is small steps and test.
After you have the least oscillation from look ahead, then low motor is very important. Keenly watch when the as tractor approaches the line. If its next error is always the opposite side of the line low motor is too high and over steering. If it struggles for a long time to pull back to zero without crossing over the line low motor is too low.
5 Likes
RTK yes AOG as RTK light bar works excellent autosteer not so much.
Redone all my tests (concreate) little slow to get to line but it some what works
Look Ahead 2.1 to 3 find 2.4 works oke
Speed gain 1.4
Sidehill 0.0
Integral 1 (2 and more oscillation starts)
low 73
Min 37 pwm
Max 180
Will try in normal field later.
Really hoping that I will seed with AOG but I running out of ideas for setting changes whatever i try its not good enough for seeding.
Reducing P can help, start from 50, try both directions, check out 10Hz GPS adjustment
Check out this video:
AgOpenGPS (tuto) V5 | Exemple des étapes initiales de réglages de la V5 - YouTube
I am using 68mm wheel on steering wheel by video 1.5 rotation of steering wheel for 1s I will go 255 max pwm I can’t achieve that speed but I never wanted u turn.
Min- should be done by using arrows in steer configuration set 1 deg and how fast it moves to 0 err if too slow never gets to 0 err, too fast oscillates or overshoot.
Low- math in video.
Will try lowering P to 50.
One setting that I left default is turn radius how important it is for normal autosteer (no uturn)?
Steering wheel is quite hard to turn (compared with other tractors) there is no slippage of wheel on steering wheel having smaller gear system gives faster reaction then I see from wheel maybe going for gear system is better but now its too late.
I am using 10hz ardusimple config for rover or some specific adjustments? Where is shown in AOG how much Hz it has?
Touch the speed value on the aog screen and you will get some more information, on the right lower area there is Hz ~ Performance Value (Tablet)
Max steer, try lower it to 25
Min, should be to value which easy overcomes friction of motor, motor should not stall
Try in first step without integral on flat ground
2 Likes
Switch to ortner 10hz rover config,
Under IMU above Tram 10~11.2
25 pwm ? Thats lower then minimum.
For min it ether can’t get last 0.1 0.2 err or it never stops cant find good value. (With incresing P it gets closer to 0 err).
I increased to max 254
Low 115
Min 55
P 90 (lower it gets worse results)
Look ahead 2.4
Speed gain 1.5
Redone cpd and ackermann from steer video record way, to be approximate what I know is max steer angle of wheels (35) deg on full turn.
It gets to line but I dont have long line at base (10-15m) so line following is oke but need to test for longer distance and higer speed. Real problems begin in field when its bumpy and high speed.
Interestingly recorded path works perfectly, curved path (5kph test).
I coudnt get my tractor to drive straight with PP, so i switched to Stanley. The steering wheel is now really calm and it follows the line perfectly. With PP tried every possible combination of setting (Fix distance, roll filter, motor setting, integral, sidehill, look ahead). Here is a picture taken two days ago, planting sunflower with stanley steering.

4 Likes
How well is it following the steer chart during standstill pushing the left and right arrow using the drive
function?
I’m not sure if this will work for you but I had trouble setting up an old sp sprayer which had worn ball joints kingpins and ram pins. I followed the videos and it worked allright at low speeds testing but was hopeless in field conditions. I looked at the steering chart while I drove it by hand following the light bar, and found that it needed a lot more aggressive input. From memory the min pwm was at 35 and worked at 8km/hr but at field speeds of 24km/hr I needed min pwm of 60. At pwm of 60 it was nearly oscillating at stand still but while moving it was fine.
1 Like
I did’t look on charts but increasing pwm seams to produce better results.
What is needed for stanley?
Antenna on hud or leave it at cab ?
Both my tractors have antennas on roof and use stanley. Tested both with pp and stanley, one tractor the one i described only works well with stanley, the other works pretty much the same with both. Im not sure why is it like that, they both use exacly the same components. To switch to stanley just click the little tractor icon on the bottom left corner of AOG, it will change from blue P to orange S and of course once you try it let us know. Some other setting you can try out are fix distance, roll filter, heading fusion, motor setting, make sure the was is zero, CPD and anckerman values are good, tractor mesurements are correct.
2 Likes
Yoi must try zero m antenna hight , and pp