How long is your cable from IMU to PCB?
Which IMU?
How long is your cable from IMU to PCB?
Which IMU?
2m from IMU to F9P and then 1m usb to HUB, CMPS14
Guys, when your antena is on the hood, how much “lool ahead” do you set?
I’m using Pure Pursuit with antenna on top of the cab about 50 inches in front of rear axle. CMPS14 is mounted inside the auto steer box to the top of the box. No interference, easy roll adjustment and dials right in to get u turn adjusted correctly. Definitely don’t over think the installation, biggest difference is configuration/firmware and also getting correct agopen version with correct arduino downloads. I fought settings for days and once software was corrected, steering was almost spot on without changing settings at all. If steering is way off, look into configuration, n-trip, rover, base station, caster issues!
Does anybody know:
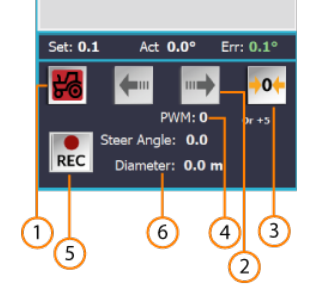
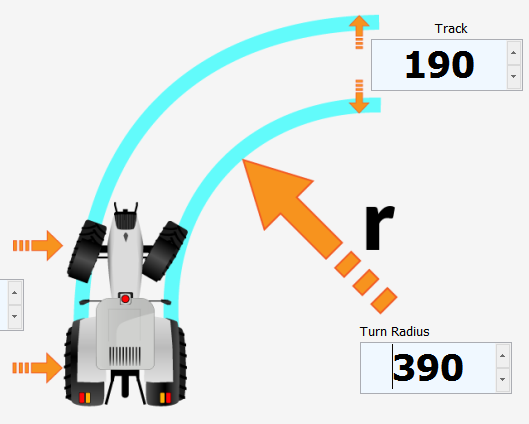
the diameter value (6), which is indicated after sucessfully driving a circle, defines the outer diameter, the inner diameter or the middle diameter of the vehicle turn circle?
The inside diameter is visible in the photo. I may not have understood the question.
I’m not sure, thought it was center line or on the antenna position, but haven’t measured to check. However I would advise not setting the turn radius too the limit of how tight the vehicle can turn. It needs to be able to turn tighter to get back on line during a headland turn if it has understeered. It also makes the turns a little more pleasant.
If you press record and drive in a constant radius circle after some time it will display the Diameter.
So take that number change to cm and divide by two, then enter it exactly where @whiterose describes.
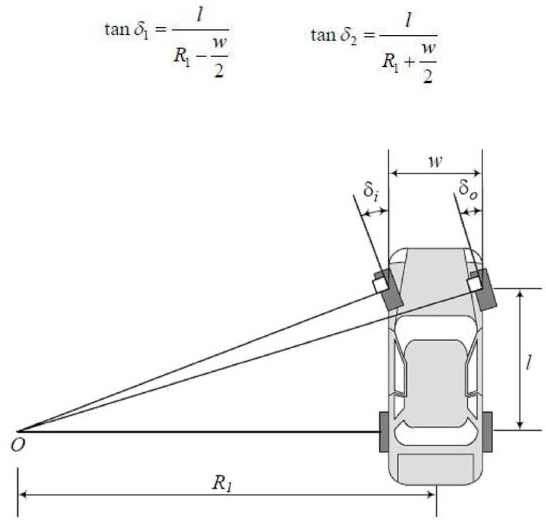
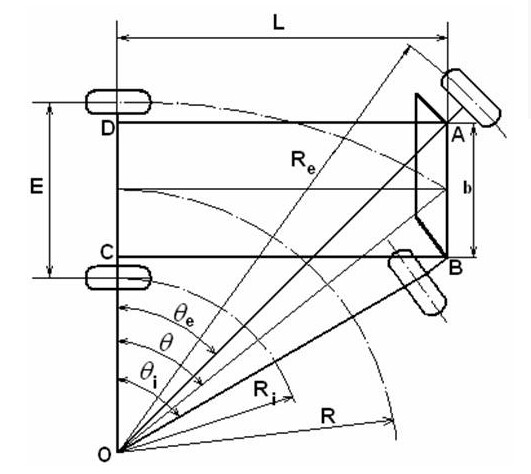
I was in a dilemma, shouldn’t the turning radius be calculated from the middle point of the vehicle since the vehicle rotates with the ackerman principle?
I entered mine as from the middle of the hitch and it works well, always round up. I used the drag a circle method.
The tightest radius possible never happens due to wheel slip.
AOG seems much more picky with measurements with a tiny machine vs big ones.
i dont check the code because i m not specialis but in AOg we enter the general thread and the whell base so no information about front axle so the turning angle can be only on the midlle
Cheching the max turnig angle by checking the angle on the whell pivot is an error , of course it is not a big error
I like the implmentation of automatic calculation with physical test do by @BrianTee_Admin in this V5 because it delivers the reality and can be adapted in some case according the task that modify the front axle turning ( slippage , low and heavy weight , soft and hard surface )
I think that measurement is only for the u turn, and has no effect on ab line tracking. I have always set it larger to calm the u turn down
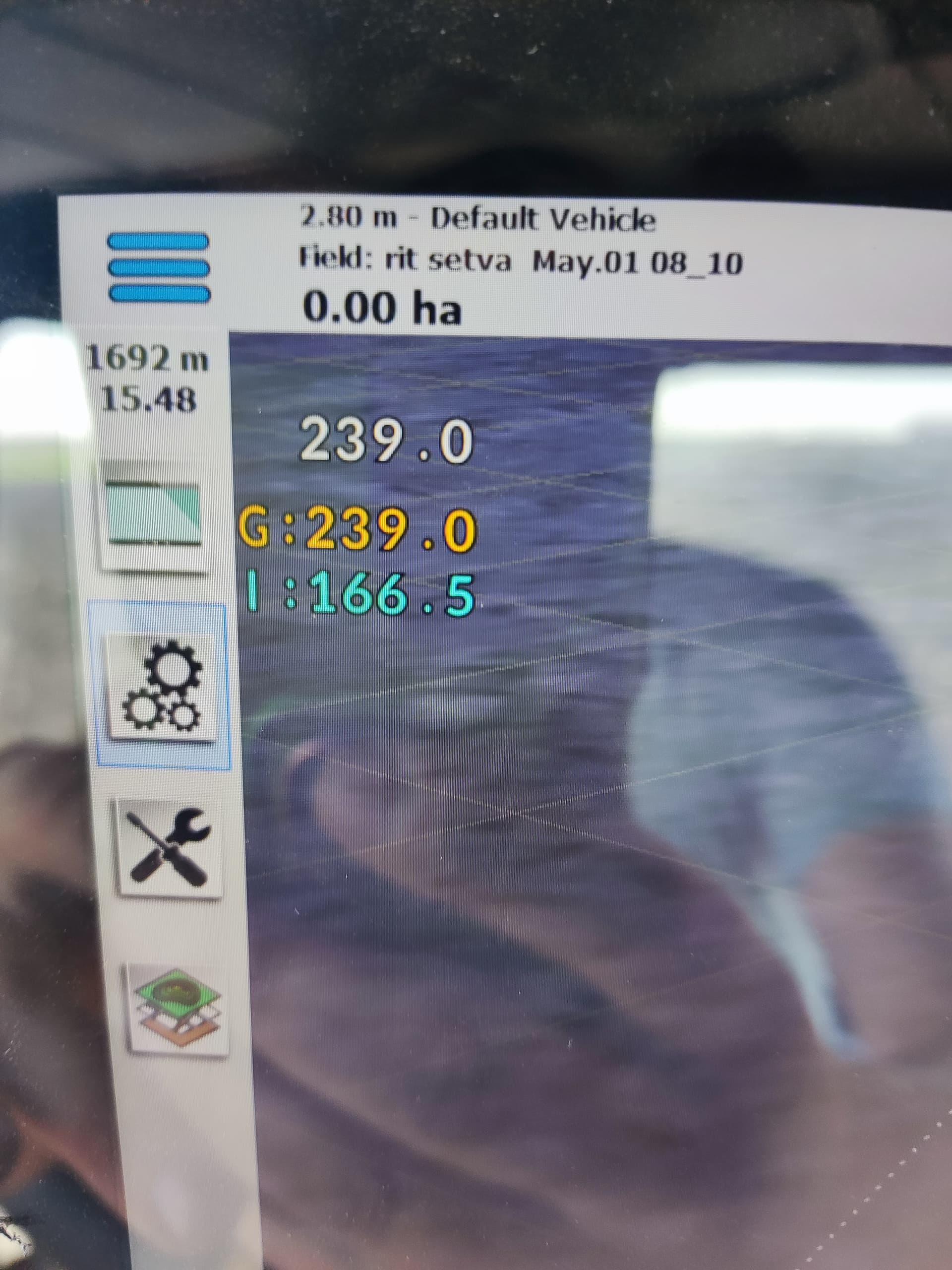
Can someone tell me what number with letter i represents?I know it is imu but what? yaw or…
Does its value needs to bi like first and second number or something else?
I saw some video online, all three number are close, maybe identical, but mine no rules.
Somtime diference is five times less.
That Is your IMU heading in degrees, your direction.
The big deal about PANDA is it makes those numbers track exactly, there will be a tiny difference under normal circumstances.
you may be 180 degrees out, the imu has a direction of travel, try turning it 180.
I’m sorry , what is PANDA?
Its a new way of fusing the IMU and GPS with the teensy micro controller directly, this creates the PANDA nmea type sentence, its a new AOG experiment project.
The current way the IMU lags the GPS heading. You will still be able to drive extremely straight without PANDA. They are just trying to get every percentage of performance possible out of AOG.
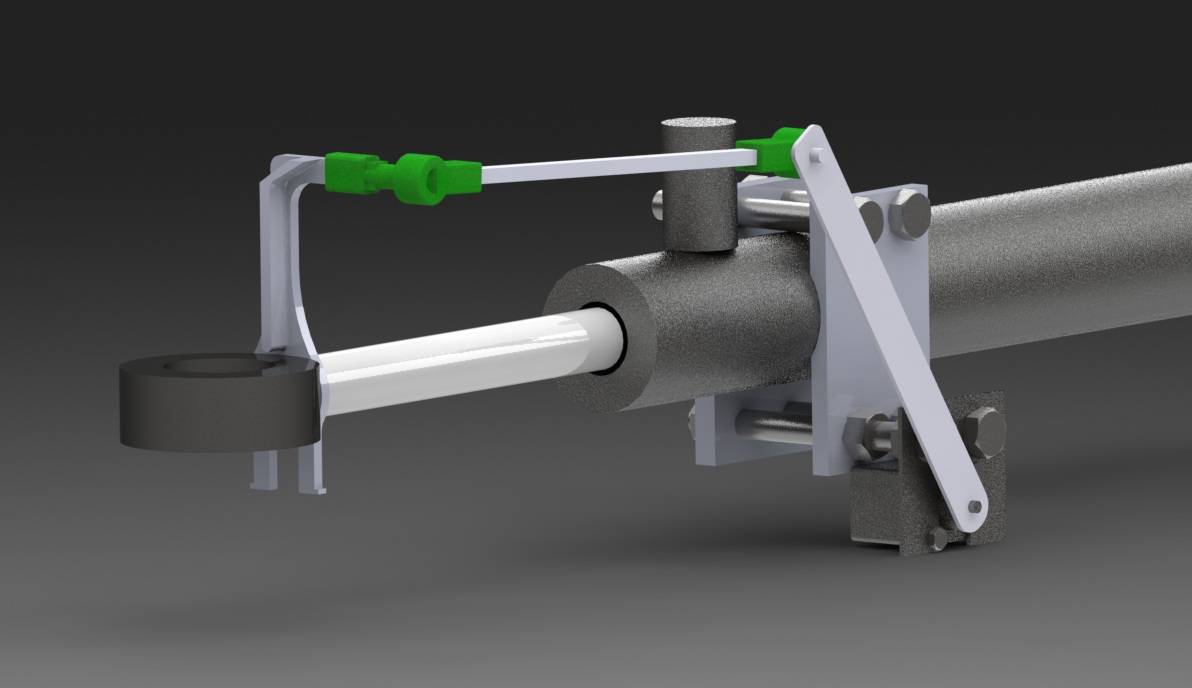
This is how me and my sad solved the was on both of our tractors. So the was has a little extension arm which allows it to almost go its full motion, but not so much motion that you can break it off. V5 is easy compeard to v4 because even if your was 0 is a little off you can adjust it easily.
I remade WAS to get full range, 3d printer is great from CAD prototype to production instantly.
I did tests and it worked till 20-25kph which is 3 time more then previous setup, but to get it to work I set fusion 5:95 and antenna height 0 this points to BNO producing heading problems. (Stanley always starts to oscilates)
Antenna on hood,
PP:
Look ahead 2.8
Look ahead speed gain 2.1 (this seams to fix oscilations)
Sidehill 0
Integral 0
Motor
P:100
Max:150
Low:85
Min:60
Should I remove IMU from setup or is there something that can be done ? (Cant find/buy teensy 4.1) IMU is oriented right way.
I tested such a cylinder the other day, it has an internal sensor and when I activate the sensor it is 4.20 mA. I learned that there is a position sensor that works with the device, this type of cylinders would be very suitable for us if they were cheap.