It seems your + - 30 degree steering angle is correct.
0,5 degree difference is not enough to ruin your steering.
Even a wrong Zero setting will not make your tractor zig zag, a few degree wrong zero will just make tractor drive 10 to 15 cm beside the wanted line, but still straight.
Is your steering Hydraulic or Electric motor?
You tell steering get bad when on hill: Try to set antenna height to 0 meter and NO imu Fusion (set to 100 % GPS)
Fix to Fix still at standard 1 m
Look ahead: try your 4 m again.
I KNOW this will lead to not going straight at changing hillside (because antenna is up on the roof and then move sideward as hill change. BUT now you know, that is the reason, and no other program calculation.
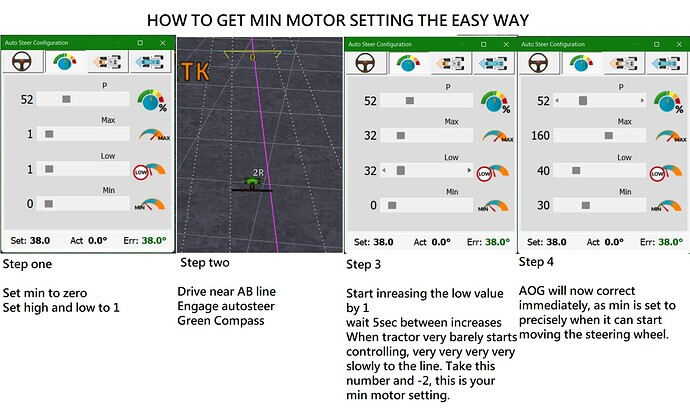
Try the Brian setup video again for P and Max Min settings, and see if you get improvements.
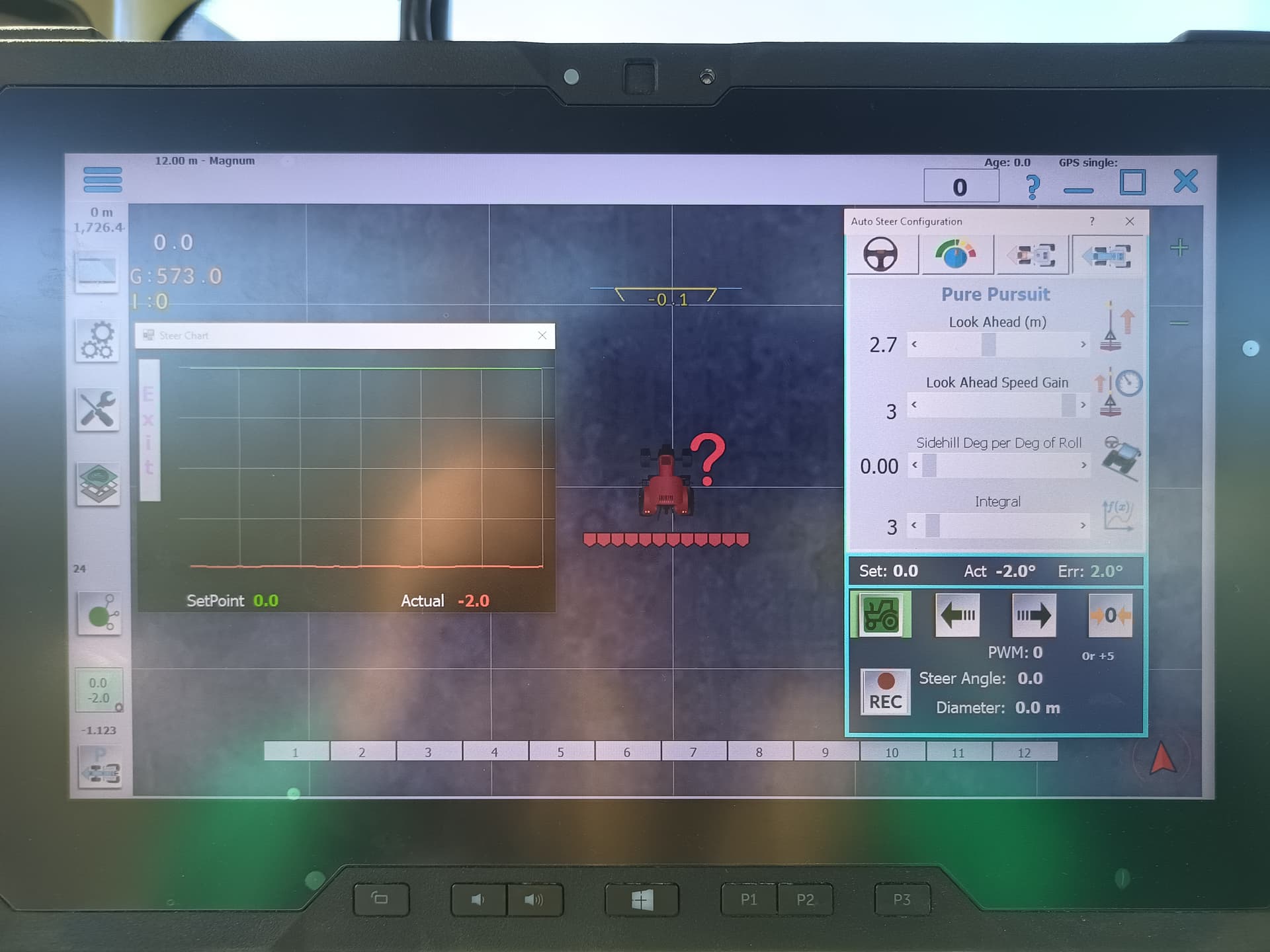
Could you post a video showing the zSteer Chart, and how the steering wheels are moving
WAS angle at no wheel movement should not fluctuate. Are you measuring voltage from WAS with tractor running or off. Possibly getting noise on the circuit? Also grounding is key all grounds for system should Ideally be landed at the same point as to not have ground potential differences. It is also best practice to run AOG pcb power direct from tractor battery. Just some ideas for thought.
Tractor was running. I ran 12 gauge wires to battery and hooked everything from AOG (router, Panda, tablet, autosteer board, etc.) into them. So i don’t think there should be excessive noise there.
The display is really jumpy. I just tried switching fusion to 100% GPS. The display didn’t jump like that with IMU fused in, but it followed the line about like the video shows.
Somewhere about halfway through the video I changed the antenna height from 114(which is what it’s supposed to be) to 0. Couldn’t really tell a difference
I can see from that that something is off. It jumps around and overcorrects. If I manually got it right on, it would hold it steady, but if I bumped the wheel, it would start oscillating again. Turn down Min? Low?
I have the same trouble like you with my WAS (a RQH100030 or something similar from aliexpress)
The key is that when the bar (connecting rod) is at 90º with the plug it’s supposed to give about 2,5 V and it gives 0 V. In fact it gives 0 from 2,2 V up to 3 V. I think that’s why this WAS drive us crazy.
The opposite side gives exactcly the same values. Both are symmetrical. I don’t know what to do:
Maybe get a more expensive Honeywell sensor?
Any ideas?
I fought a problem with a potentiometer recently being intermittent. Try plugging in a regular pot to your nano. My problem was the nano was bad. I also had a bad ads1115 when i first built my system. Something to try for troubleshooting.
Thanks everyone for the help. We’re going to finish wheat sowing then try to get it figured out. One thing we have realized is the WAS seems to slowly drift to the right when sitting still. Parked at 0.0° , 20 seconds later was at 0.1°, and continued up to 1.0°, at which point I left. We also get it steering fairly well on one pass and then it’s totally unworkable the next pass. Could the drifting be caused by a bad connection? There’s a Deutsch connector, a soldered splice, and another plug between the PCB and the WAS. Could it be a bad ADC cause drifting?