100 steered a bit excessively, but 66 seemed to work better. I think it would do fine In a flat field, but goes berserk over terraces
If Pure pursuit is giving you problems try to set the steer motor with stanley steering and when that is working switch to PP. Also try playing with fix to fix distance (2m works for me)
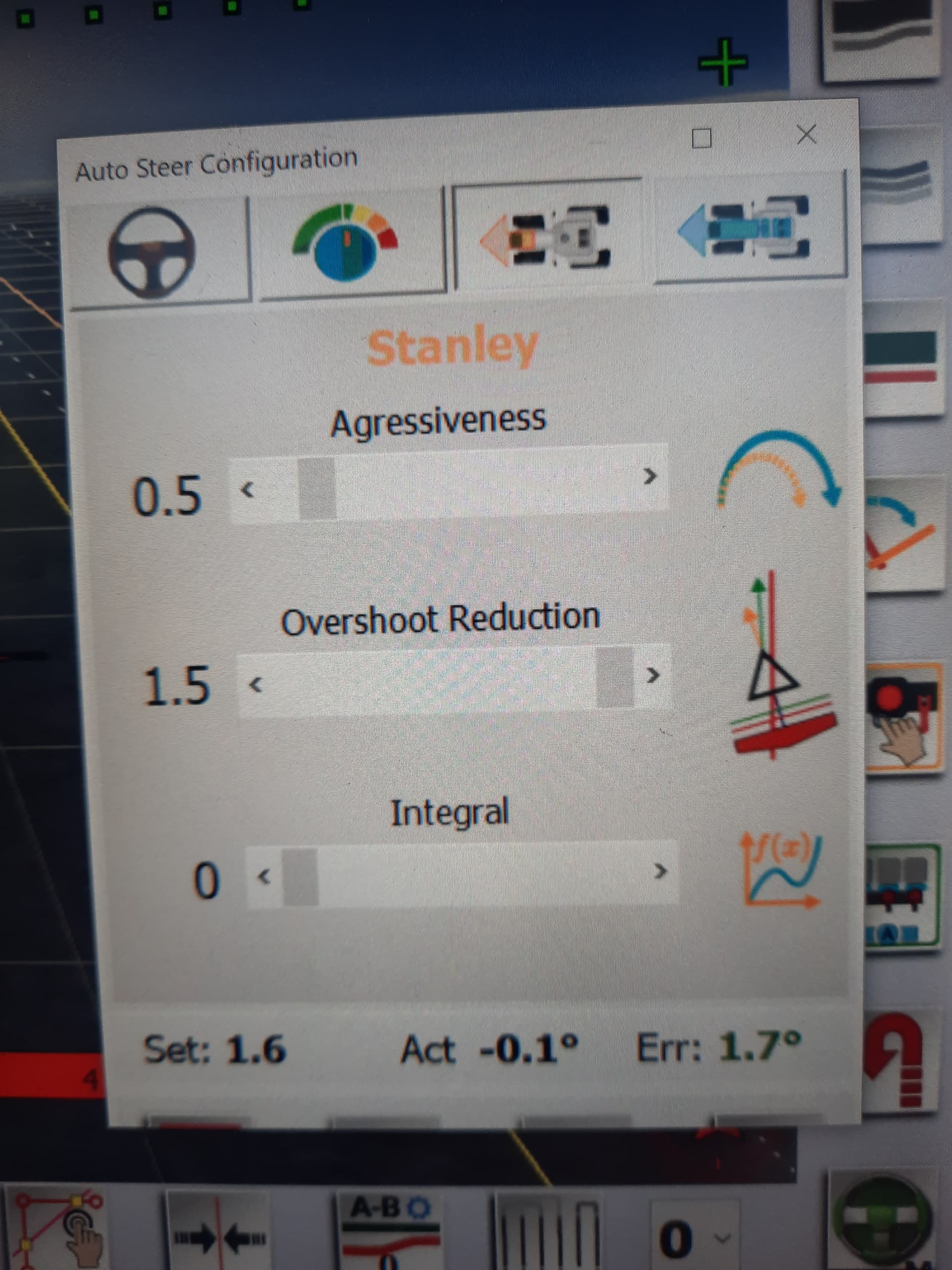
Ok I tried it in Stanley, it would work fairly well if I very slowly allowed it to “find” the line and then sped up. To turn the aggressiveness up or overshoot reduction down caused zigzag.
Trying to find the line above about 3 mph results in zigzag Stanley or PP
What is the supply voltage at your WAS?
How much play is in the WAS linkage?
What is your steering degrees set to?
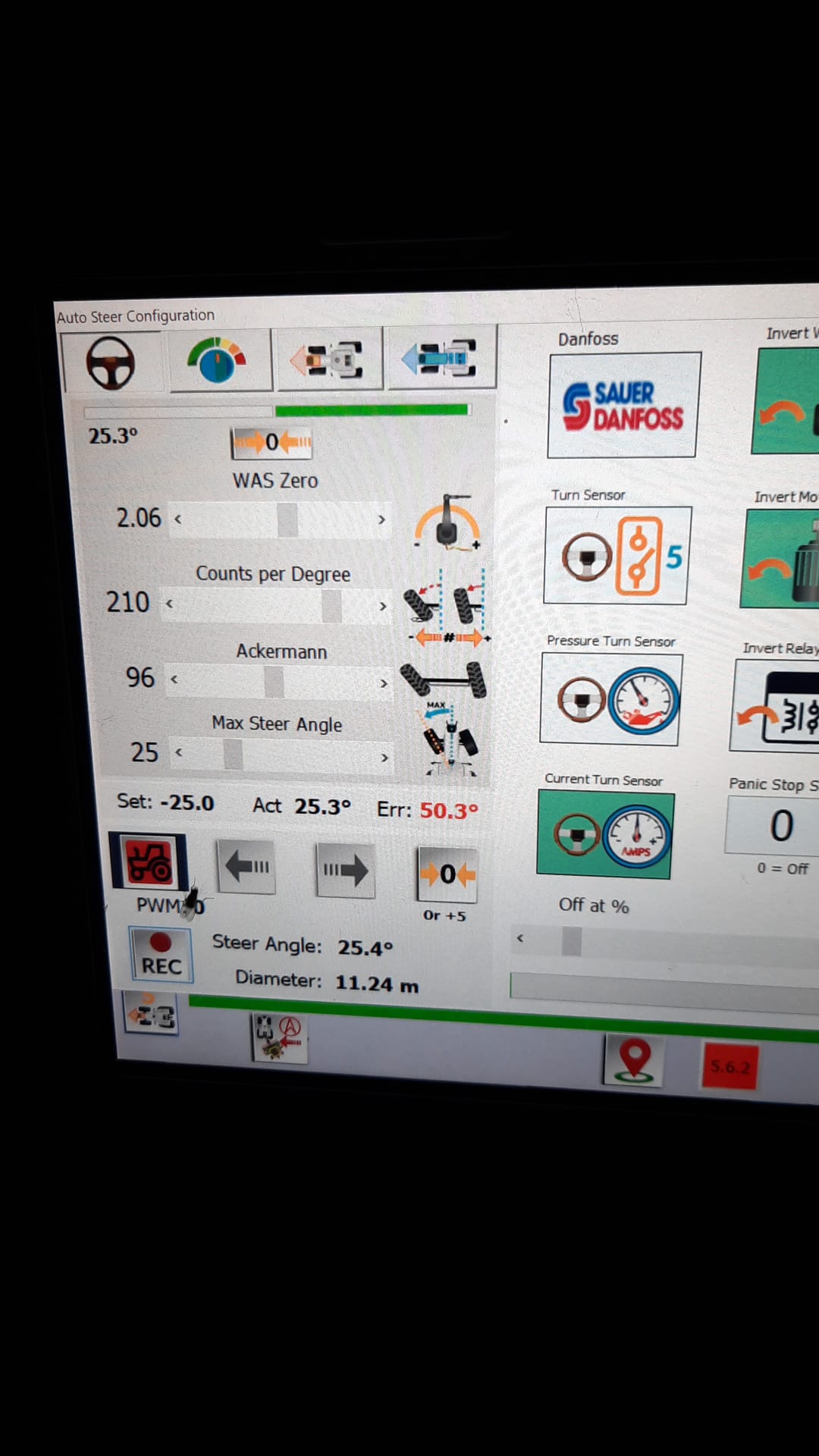
I believe you have the wrong Count per degree and Ackerman setup.
Have to test it. At the field right now.
Very little.
Max steer angle or Counts per degree?
As in not set right, or wrong version?
It seems to steer better with antenna forward set at 0. The antenna is 55 in. forward
5.00 V.
I suspect was. We get it zeroed, few days later, it’s off. But it’s the second was we’ve had on it this fall
Steering angle, when you crank the wheels you will see the steering angle beside the green bar.
I think 25.7°. And that matched the steer angle generated by the recorder
Seems quite tight, hopefully you have a smart phone. Try a camera protractor app.
Thinking it should be 35 - 45 degrees on most.

1 Like
I’m feeling really confused about setting the steer angle, CPD, and Ackerman. I initially set it following Brian’s video. I used the record feature and adjusted the counts per degree to match that. It showed 25.4 degrees when turned the whole way so I set max steer at 25 degrees. This tractor turns very wide due to large tires on the front, so I assumed that was the reason it was quite different from the tractors in the example.
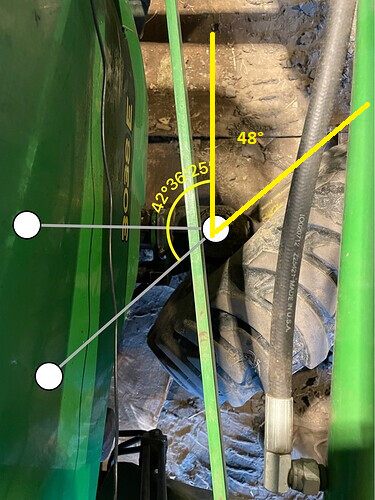
I tried using an app to measure the angle tonight. It was almost too dark, but measuring like you show above, it is close to 60 degrees.
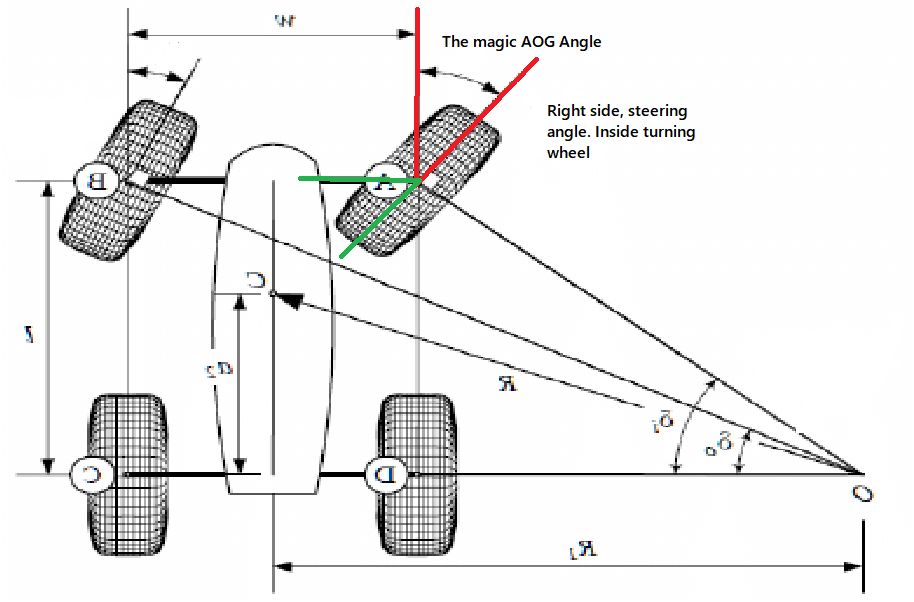
Am I supposed to use the green angle or the red angle?
The photo shared by Potato Farmer is the left front tire of the tractor, if it was the right front tire, it would be like the photo I shared. Use the red angle. If you measured close to 60 degrees, your angle would be around 30 degrees.
I think that the maximum turning angle and the ackermann have nothing to do with the zigzag, it seems to me more a WAS configuration problem (misaligned) and a too high CPD (210 is much)
They will be in relation to the axle so they should be very close to the same.
Watch the degrees as you reduce cpd.
The ads 1115 has a fixed number of counts to represent the 1-5v analog signal digitally in bits. So CPD calibrates the maximum count with the wheels full lock to the right, to match actual steer angle.
Then with wheels full lock to the left adjust ackermann to make left steer angle match right steer angle.
Finally use max steer angle to limit the max angle the computer can turn, handy to keep the hydraulics from squealing.
1 Like
I agree. start backing the CPD down as you’re going through the field and see if it doesn’t straighten up. The recorder is a good place to start but almost always gives CPD too high for a straight line.

Yes, I see the recorder was off, so the CPD counts would be too high. I’ll give that a try when I get to the field.
1 Like
the steer angle in aog have no meaning with the pivot
It is based with the “wheel base” of the tractor and can deliver the posibility of the tractor to turn
It is really better to use the AOG software to know it .
The limitation that we define in AOG are just to avoid over angle with a reference of the pivot that we can consider quite proportional
Is it normal for a wheel angle sensor to take a few moments to stabilize? I tried turning the wheel the whole way to the right, and testing the signal voltage from the wheel angle sensor. It was 4.69x. The thousandths place fluctuated a little before stabilizing.
Also, I noticed that the wheel angle shown on AOG fluctuated a bit when parked. It was showing 2.9 degrees when i stopped. Over several minutes it dropped to 2.4.
It is a Delphi ER10031. The supply voltage tests 5.00 volts. I’ve actually tried replacing it once. I didn’t notice any change in performance.
Like I said, this tractor doesn’t turn tightly- only about 60 degrees from full right to full left. The WAS linkage is set so it uses almost the entire range of movement on the sensor, so it is super sensative. The steering is fairly tight, but it’s so sensative I can’t keep it centered on 0 degrees driving manually.
It seems terribly erratic-- I will get it working fairly well one day and the next day it is totally off again. I would think a WAS connection, but I can wiggle, shake, and squeeze them, and the readout doesn’t change. Could a bad ADC cause that?
No it should not jump around. If the steering stays motionless only maybe 0.1degrees may change, but mostly no change.
I am using the RHQ landrover type from ali express
Ok. I’ll do some more checking on that.