As if AOG isn’t difficult enough how about adding a second gps receiver on the tool for tool steering? I hear they are commercially ridiculously expensive. 3 options, like normal, GPS on the tractor and gps on the tool, and gps only on the tool with commercial gps guiding the tractor.
Steering on the tool only requires distance from the line as heading is only for a vehicle. As in you can’t change heading in the tool anyway.
So steer angle is based on distance from the line and is linear in nature - single order function, whereas vehicle steering is a second order function - you need to steer away from the line as you approach the line.
With tool you only have to steer less as you get to the line.
this is all a bit premature in posting, but have a branch called ToolGPS. I will make a video this morning and post as well. about the different modes etc.
Good idea. Could make it work with a centre swing hay mower also. Be good to have the mower auto swap sides at end of each run for each new pass while tractor follows previous. Does require hitch angle sensor but even normal tool steering should have this also so if tool is getting to extremity of steering capability it can ask tractor to nudge over a bit.
This would be very nice to have added in existing Agopengps! One application controlling tractor and implement. This would give the last centimeter accuracy when tractor goes it’s own way
This is a brilliant idea:grinning:. I’m finishing to set-up a steering implement system with discs at the back of the implement (we have very steep hills). It is steered with a separate AG system with hydrolic valve. It is very muddy at the moment, but the first tests are very encouraging. The issue is the two separate system require two tablets in the tractor…. . Will you make the gps position & the steering point adjustable in the config?
This is a picture during the installation (missing GPS Antenna & Electronics)
This is great! What would it take to also have the option to steer the tractor off the line for people that don’t want to add steering to the implement?
Well that will take some serious fiddling!! but with position coming off the tool, realistically it should be no different then adding an integral term to the tractor steering - just like the integral does with tractor steering. Or just move the AB Line that amount - lots of things to try and fail at lol - but i think it should work. There would be a delay and a swing of the tool as you correct which may be tricky to get around.
I just watch the video . Brilliant! Yes I mean the distance of the antenna that is on the tool to the tractor pivot ( but as I understand it doesn’t really matter as it is a first order system). It will need the height position to calculate the exact position of the tool with the roll given by IMU. In the video there is no input for the tool imu. Will you create it to calculate the roll compensation inside agopengps or we will need to switch to PANDA as you said in the video? ( in that case I need to buy some teensy board and start to play with it… )
Well yes i need to add that as well. Panda doesn’t actually correct the roll it just makes sure the fix is timed with the roll taken at the same time.
There is getting to be sooooo many combinations of boards and ideas it is hard to know how to test something like this. I don’t have a steering type implement at all. Maybe a better way is me just asking - How can i help?
I opened the tool_GPS branch and I see there is a IMU data in the tool steering Module. If I connect the IMU (CMPS14 for me) to the Nano of the steer board will it work without change in the dev? I will try that when I have the time!
Thanks
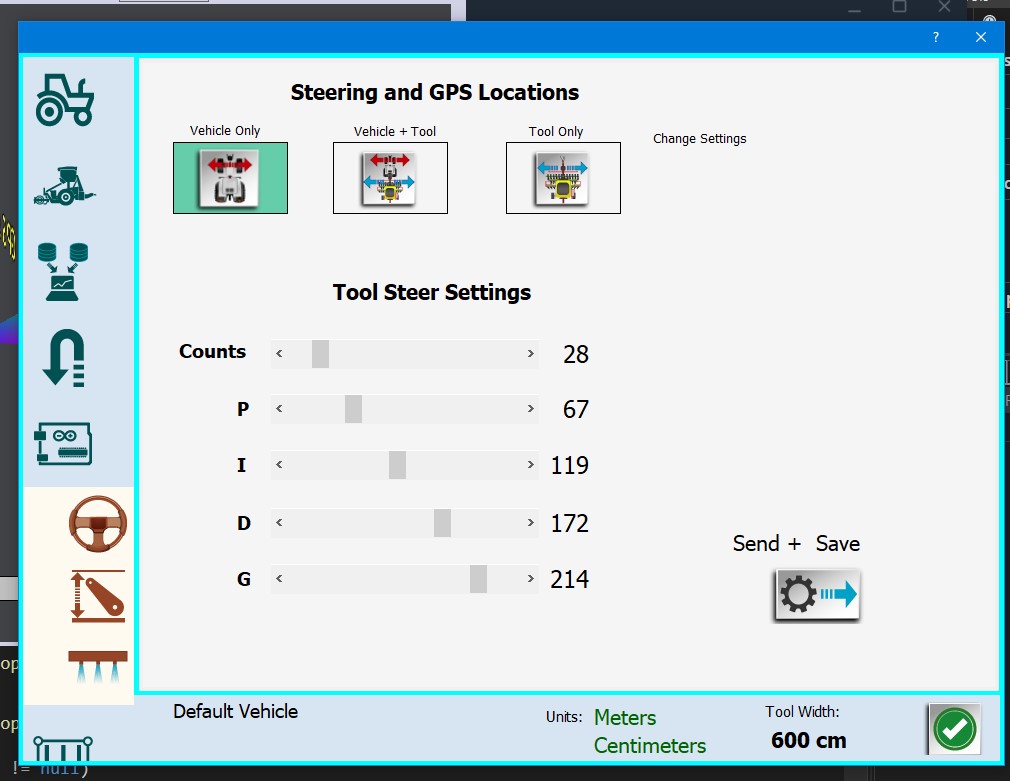
You’ve speech about the counts on the tool settings, does that mean that we need a sensor to tell the position? The feedback from the GPS and the XTE are not enough?
Hi!
Is it possible to use the IMU from Traktor as roll source for the tool?
The Tractor steers now with dual heading, so I have the IMU MMA8452Q available for tool!
If so, I just put one antenna on the tool, and wire it to the cabin,
where the GPS Receiver and the arduino (old PCB from Andreas Ortner) is located.
That means when I don´t have to put an IMU on the tool, the wiring is easier!
Compass (heading) is not needed, because calculating distance from line, I heard?!
Many thanks!
You would still want the imu on the tool to correct the roll of the tool. It may not be (won’t) be the same as the tractor.
We still are working on it and getting a board together that can dual single steer no steer gps Panda with roll that can work for either the vehicle or the tool and all connected by ethernet.