I discover this version which interests me strongly.
for me it would be for planting vines.
I downloaded the version after reading the subject (not all) but I don’t quite understand how to create the planting grid with the tree.
I also read “tree planner panel-D” in the download folder but unfortunately the photos are not loading.
there is no way to tell the program to plant a plane in front of each line on the field border.?
to get an idea, as in viticulture we plant very close to the line (about 1 meter) we like to finish the field at a regular distance from the real edge of the field (between 6 and 10 meters) to be able to turn with the tractor and the tools.
with commercial planting gps system solutions the planting preparation procedure is as follows:
they go around the field to create borders (often by putting the antenna on a pole)
at the same time it creates the A-B line (often on an already existing row of vines)
then in the software it determines the width of the headlands at the beginning and at the end of the lines. a first plant is systematically placed at the intersection of the headland line and the planting lines, there is also often an option to put another plant at the length between the plant brought in just after to facilitate the establishment of the trellis.
all the other plants are planted at 90 degrees from the guide line. according to the software it is also possible to point a GPS point on an existing plant of the row of vines which served as a reference for the A-B line so that the placement on the line is the same on the new plantation as on the old one
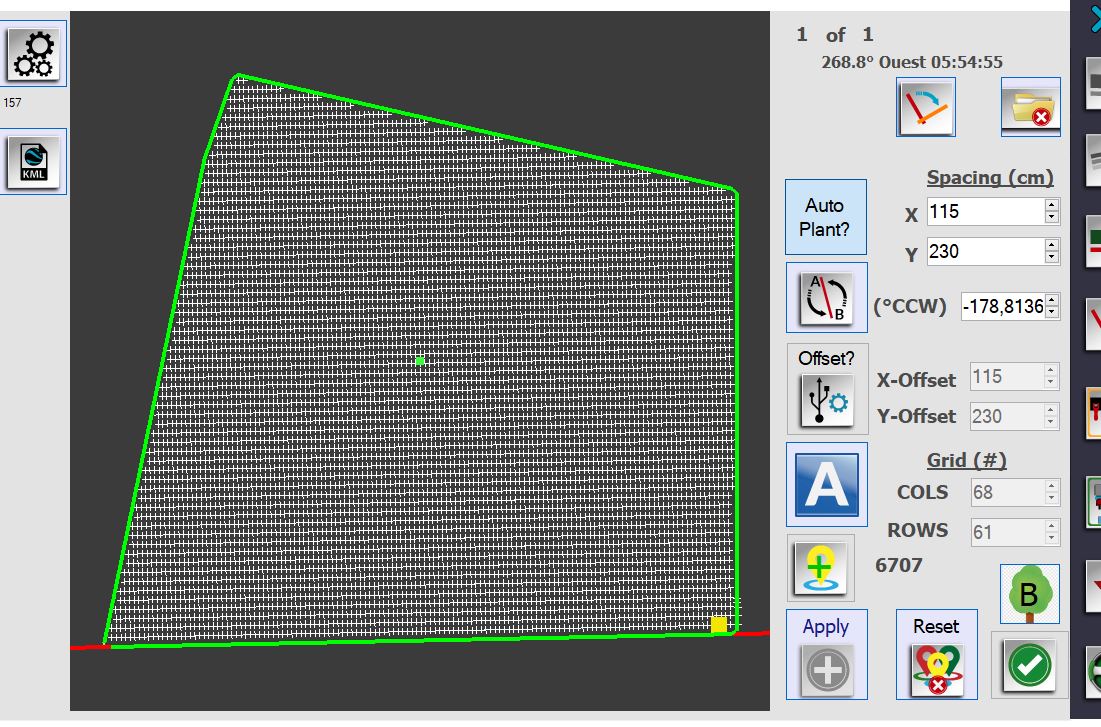
then he enters the distances between rows and between plants (in my screenshot 230cm x 115cm).
I don’t know how much time the modification of the AGO tree planner program can take to bring it closer to such a system and even if it is something achievable?
I have a good knowledge of Arduino programming but I have never practiced programming Windows software like AOG.
Yes, it should be in front or in line with the rows or columns. I don’t remember which. Set the tree grid at the same time you set the boundary trees. Watch the green dot this is the reference point of both boundary trees and grid trees. If it moves, it will not place them correctly.
I didn’t have much time to devote to understanding how to position the first plant on the border line.
I place my green dot on the A-B line parallel to my planting lines.
at first it’s a detail for the first plant.
if I come back to you it is because I wonder if it would be possible/simple to recover the distance in X and Y by pressing a button?
let me explain.
I have the idea of using this AGO function to integrate it on the type of machine on this video. https://youtu.be/53ad2BNFEAw
the usage logic I imagine would be as follows.
I approach the location of the stake to be planted while driving manually.
when I am less than 20cm in X and Y from the position I stop the tractor
I press a button to connect to a digital pin of the arduino which launches a sequence starting by leveling the mast vertically on both axes (the antenna would be attached to the mast)
once the leveling is done, the arduino interrogates the software to retrieve the offset in X and Y to be applied.
the software should therefore be able to recover the exact position of the antenna when stopped, compare it to the theoretical position of the stake to be planted, calculate the offset and send it back to the Arduino.
all the arduino coding part with the installation of linear encoder, the upgrade with the actuators and the imu does not pose any problems for me.
the modification part of AGO on the other hand I admit that it is out of my current competences.
I tried to look at the source code but when I try to make a modification I stumble on the ranges of the variables and I have no concept of the vectors for the calculation of the GPS position
do you think this is something doable and for which you would be able to help me for the AGO part.?
The arduino code can be run on a teensy, I believe. I think some have made the teensy run part of AOG. I will not be updating the AOG-Tree until version 6 of AOG comes out.
wanting to retrieve the GPS position while the tractor is stopped will not complicate the task.?
the history of slow speeds is just for the calculation of the trajectory I presume.?
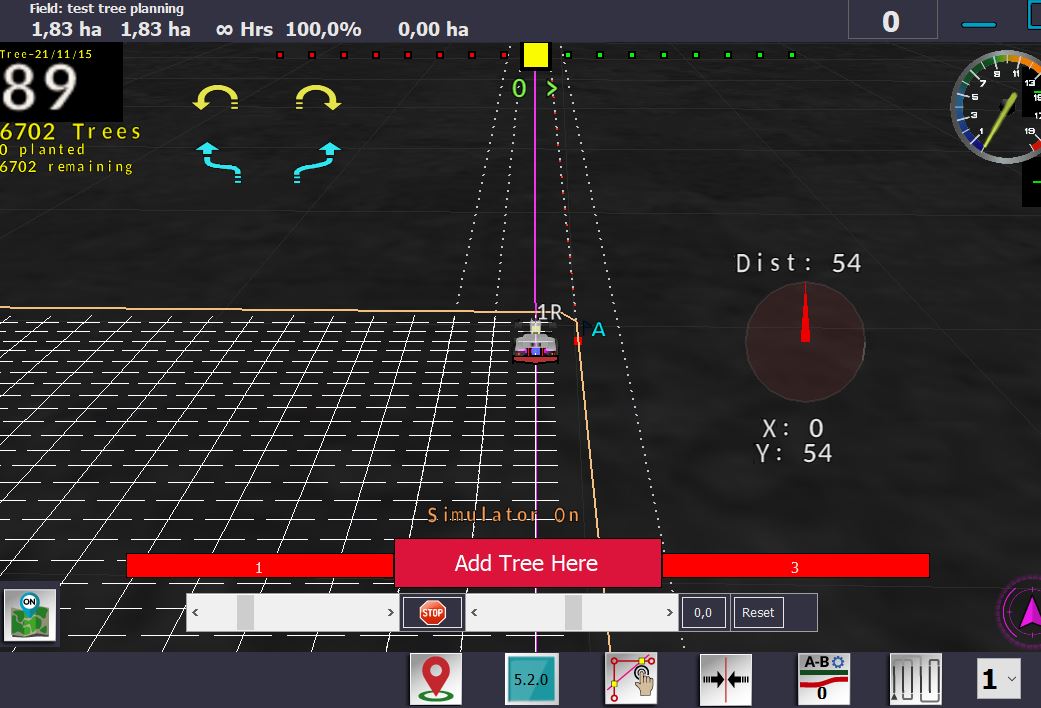
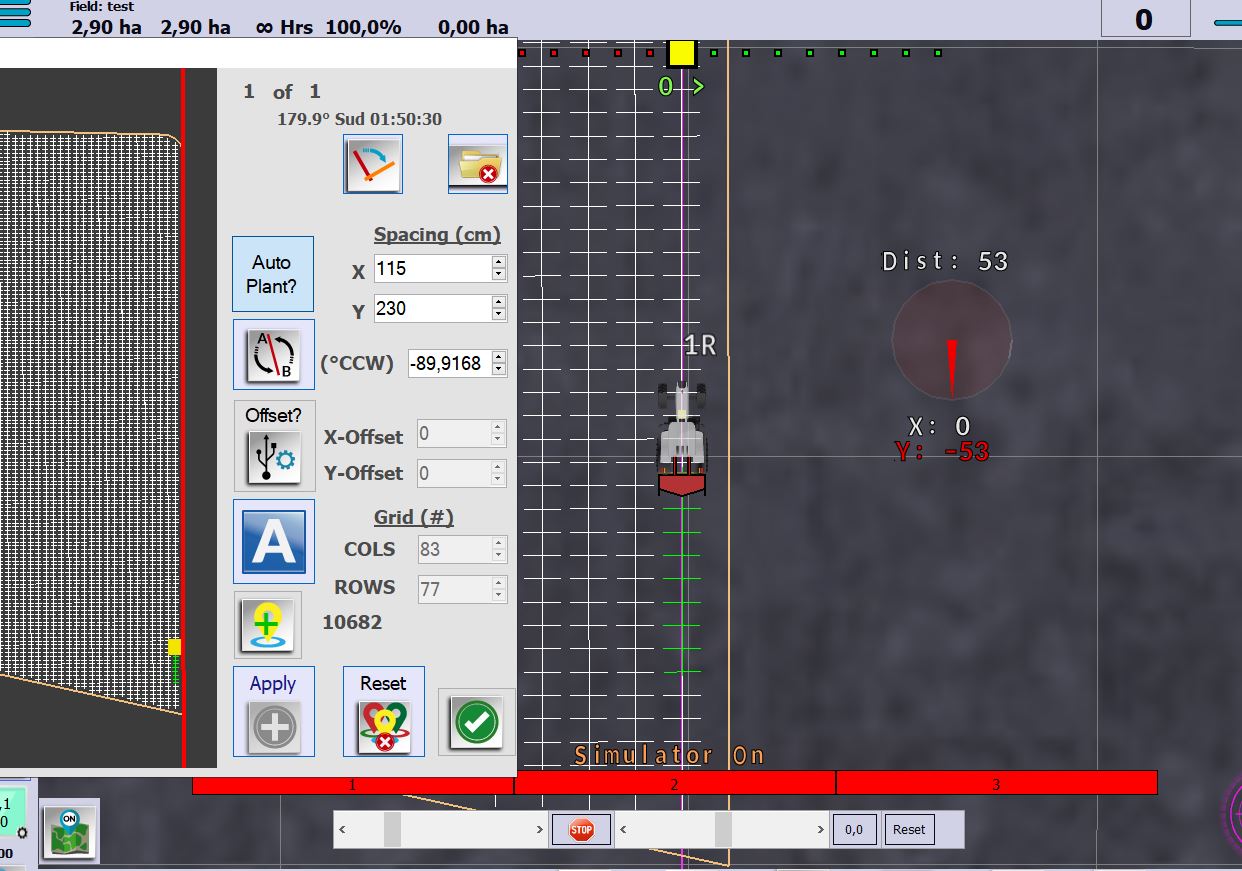
by playing around with the software this morning in simulation I realized that X and Y are inverted between the tree planning page and the distance rosette before the next plant in the main software.
on my screenshot 230cm is the distance between two rows which follow my AB line and 115cm is the distance between two plants.
on this subject, as I will have to use the tool for planting stakes on plots planted with another GPS planting system, will it be possible for you to add an offset adjustment box (between rows ) to make up for any differences between the two systems before sending the offset to be made to the Arduino.?
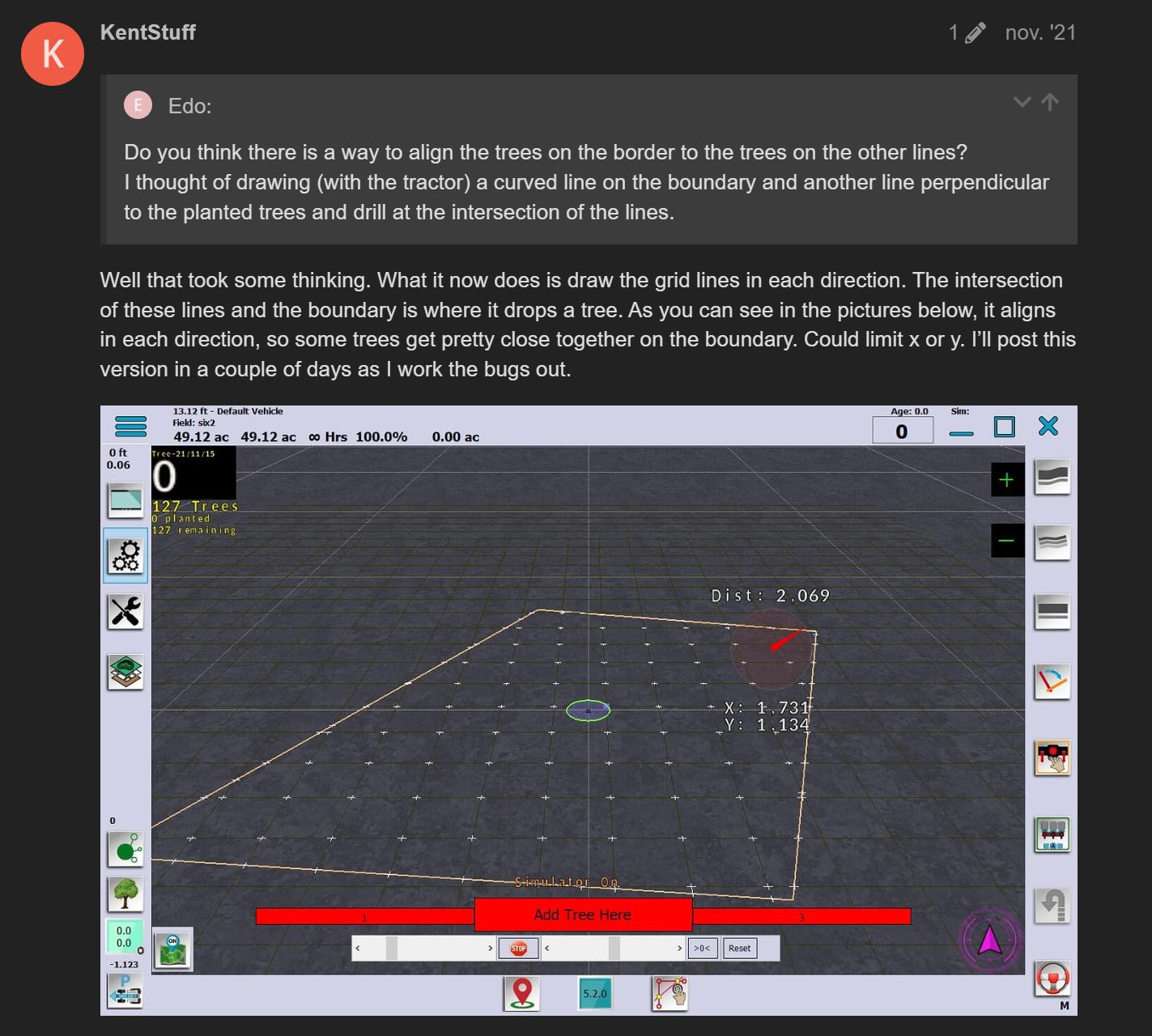
I also read the entire discussion to try to understand why I can’t position a plant at the intersection of the planting line and the border lines as is the case on this capture of screen.
Was this version published and if so the algorithm is still present in version 5.2 that I installed.?
For the middle question about x and y. In the settings, x is the distance along the abline. In the main screen, x is right and left perpendicular to the path of travel. If your abline was at a 45 degree angle, x is still along the abline. But y is still in front and behind the tractor as it is traveling.
When sitting still. The heading can and does shift with a real gps. We may have to assume a heading while coming to a stop. Otherwise the x and y adjustments could be in any direction.
I’ll look through the tree code to see where the boundary grid planter may be. That post was over a year ago. It may take me a bit to find.
Edit:
I did not respond to the question about shifting a line of trees over. If you are aligning with an existing row, it may be best to build a line of trees at a time. I think it locks the build button until you reset the whole field. It may be a feature to add. Does the abline stay true from old system to new? My thinking is look for all trees along this line and cycle through them shifting them perpendicular to the abline. But if the abline does not match, this will not work.
Thanks for the notice.
I was wondering if in the next versions of Aog, instead of the yellow dot on top field view, it would be possible to make a top view like this video (right screen only). If it won’t be too complicated.
Now to stop at the correct point I simply look at the distance to the tree. Tree planting video.zip (7,8 MB)
so either make a button in the general interface to lock the direction variable when starting a row or retrieve the last direction before the tractor stopped.?
thank you,
for the planter of stakes it is not of capital importance but in the idea of later making me a machine to plant the vine it would be.
I wonder if it would not be interesting to also study the possibility of placing the green starting point by a button which would raise the GPS position (like that for point A and B of the A-B line).?
it would align the new plantation perpendicularly with the old one already planted next to it.
normally at the software level there is no reason for there to be a lag.
on the other hand on the ground I could note a difference which can go up to more or less 5cm.
the heading remains good from what I have seen, I think that the difference comes rather from a bad centering of the tool or from badly managing cant.
I was waiting on version 6.0 to come through as it will be a major update. Then, using that version as a base, build the tree planner back into it. We should probably start a list of feature suggestions that everyone would like implemented.