Ive got the same aio as you. I meeded some jumpers on some pins at the front of the cytron to get mine to work.
Theres something wrong to melt wires like that but i had a bad experience with mine but i put it down to the wrong steer switch being used
Just wondering if theres some solder touching on them front 12v 24v pads.
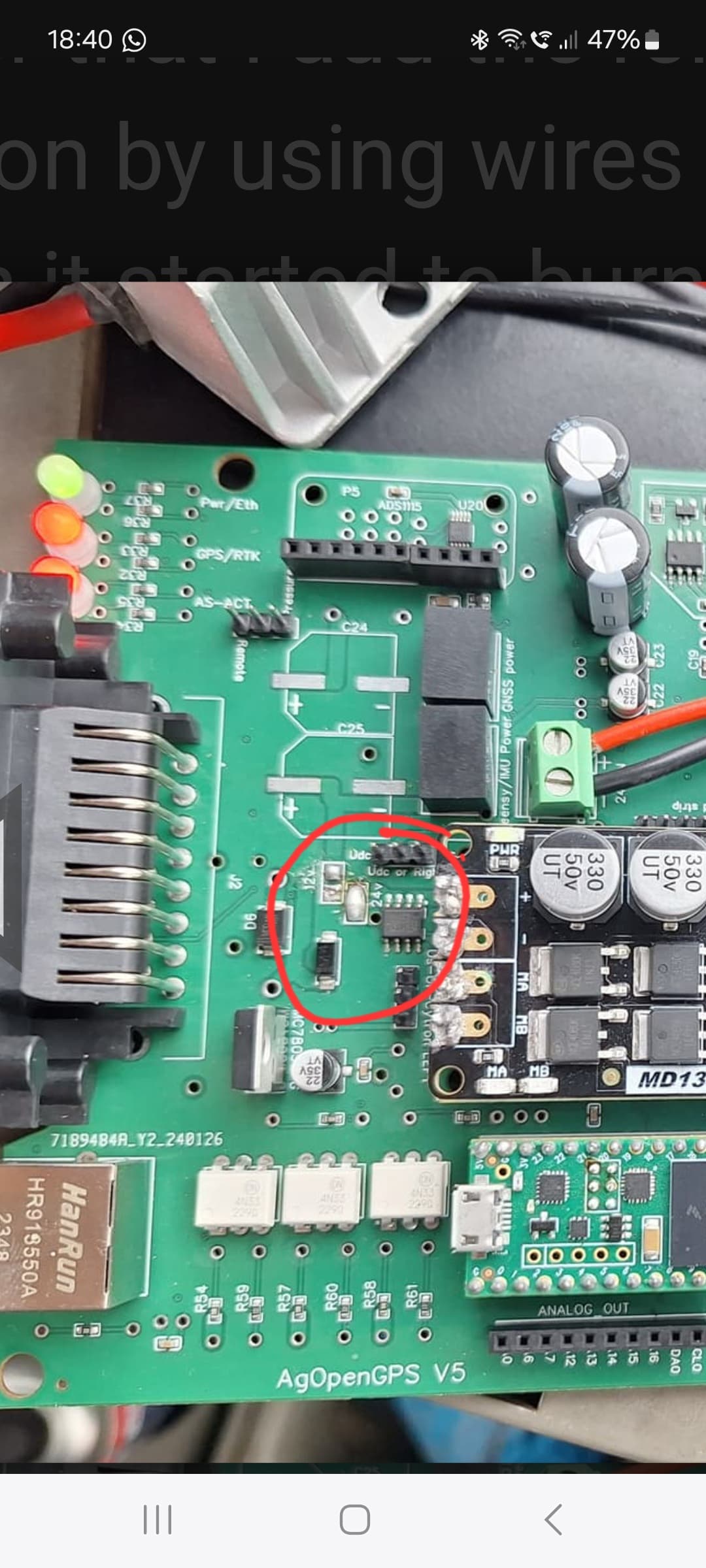
I thought the same, but they are not touching, already checked that
In older pictures i uploaded you can see that they are not touching
3269 Phidgets motor:
Rated Current 2.2 A / Stall Current 10.8 A
Anybody know what size machine screws to attach the faceplate to the ampseal connector on micro board?
The ampseal connector uses 4x M2.5 self tapping screws. 10mm length if using the spacer, or 8mm if not using the spacer.
2 Likes
Thank you sir
Does anyone have F3D files for the micro enclosure? I’d like to embed some text labels for GPS/Radio antenna and importing the STL files is a big mess

1 Like
What if I have to get that working? I’m just a web programmer.
Why in the world must i choose for this project.
Yes. I have a tractor and a plough.
I,m confused about the current sensors. I know the one is used with hydraulic steering, but what are the other two for? Is one used to turn off autosteer if you grab the wheel? If so can you point me to a wiring diagram for doing it?
Thanks for any replies.
There is only one current sensor on the AIO PCB. It measures the current used by the Cytron which can be used to control the hydraulic valve or steering motor. In the case of the motor, it measures how much current used anytime the motor is active and if you resist the wheel it uses more current. Fast turns like uTurn also uses more current. This reading can be used to disable autosteer but you need to set it higher then uTurn’s current usage but lower then the current used when you grab the wheel and resist the motor. The current sensor is not used when controlling a valve, instead a pressure sensor measures the hyd oil pressure and the same general theory applies.
In the steer wizard autosteer configuration there is a page called automatic canceling feature that shows turn sensor, current turn sensor, and pressure turn sensor.
You can only use one at a time. Turn sensor is for something like an encoder on the steering column.
So if I want the steering to kick out, I just enable current turn sensor and adjust it , no extra wiring involved ?
That is correct as long as you are using a motor controlled by the Cytron.
Thank you for your replies.
1 Like
I added a second ublox f9p module with an antenna to the v4.1 board. With U-Center loader on both modules UBX_F9_100_HPG132 firmware. What other settings are needed for the correct functioning of the modules?
For dual it is crucial that you use 1.13 firmware.
You also need to load the correct configuration onto both F9P’s.
Configuration and firmware are different things.
Is it already written somewhere so as not to repeat myself? If not, what needs to be configured?
Use aogconfigomatic.
2 Likes