Thanks Whierose I have’nt used VS so it would be very helpful if you could email it to me.
Micro2 has some changes. Uturns are based on tool width, minimum turn radius, and max steer angle. It should also account for tool offset and overlap. It also has some of the V5 fixes Brian is working on.
Thanks for Micro2 it works well in simulator, will try on the mower and let you know how I get on. It will be good to have some updates to the old version. Thanks again when ever I see my mower working I say “that’s just unbelievable”.
Any of you can test it in a small tool, and see if it turns any better. Hopefully better to the right than it was.
It is compiled at this link.
Edit: Link has been deleted for editing. Will repost soon.
I got my CMPS back to working and a software crash dealt with so finally back to testing.
Using the Micro2 with the wheel base set to 50% of actual my results are not as good as I’m getting using V5.4. With Micro2 I messed with different wheel base settings and I got the best results with actual wheel base.
Thanks for working on this, I wish I could give you a better report.
2 Likes
Thank you for testing. Did you use both stanley and pp? This may save some others the trouble.
Yes, I used both and for me PP was the best. I am sure that my greatest battle is with the 4 wheel steer. If I hit a crack in pavement just right I can feel the wheels almost steer both front and back sideways. I put new tie rods on this spring and that helped a ton.
Right hand turns are by far the worst. I will check today, I’m wondering if there is more lag. in the system turning right? I turned my GPS IMU fusion down for more GPS and that helped with system lag. Maybe Panda will help with this.
Just had a thought, I’ll tune fusion down to all GPS and see how uturn reacts.
I don’t think it’s a problem with your 4 wheel steer as I am seeing similar results on a standard front steering system; the left turn is as tight as you like, but the right turn is much wider.
Also using PP, I’ve never had good results in the field with Stanley.
@KentStuff: thanks for your efforts on this, it feels like it’s almost there, just needs a few tweaks. I hope to get back out in the field again tomorrow to do some more testing.
I have deleted the link to the compiled code. I will keep working on it to see if we can get to the problem. Please post any videos of the screen when attempting the right hand turn. Also tractor and steer settings. And if it runs in the simulator or not.
Thanks for testing.
What is your low and min motor set at?
Try putting your high motor setting to 0, crank min to 50 and low to 60. This is for a test. It will let you slowly increase pwm until the motor first moves.
Drive toward the ab line engage the auto steer and slowly raise the max setting 1pwm at a time. When you finally see anything that looks like controlling towards the line extremely slowly. 2 less than that is the minimum motor speed. Enter that in minimum.
Then low will be around 10 higher.
High is a bit higher than you need to make a u turn.
@PotatoFarmer - low is 50 min 17. Still want me to try with the 50 & 60 settings. They seem awful high. I’ll try in the AM.
@KentStuff - I’ll see if I can get a screen movie of both turns tomorrow. Where would I find the uturn code is VS. Maybe if I see what it’s trying to do I can better adjust my settings. I’m sure the math is WAY beyond me but I’ll give it a try.
The 50 and 60 are just for the motor movement test. To find the actual min.
During the test when you raise max setting one pwm at a time from 0 you will cap the max pwm for correction. By slowly raising max you get to know exactly when the motor really starts to control the tractor.
Once you know when the tractor starts moving, use the number found in max -2, as the min. Min will now be matched to making the tractor barely move.
Then if AOG goes to correct there is no delay, the wheel turns right away.
Down around line 1069 is where the steering begins. If stanley or else pp.
@PotatoFarmer ok will do
@KentStuff - do you want movie using micro2?
Yes, I will upload a new one in a bit. I’ve made some more changes.
@PotatoFarmer You better draw me a picture. I’m raising everything and not moving the mower at all.
Here is the new compiled link.
EDIT: Github is not updated yet. Antivirus decided it did not like github??
EDIT2: I think I got Github updated.
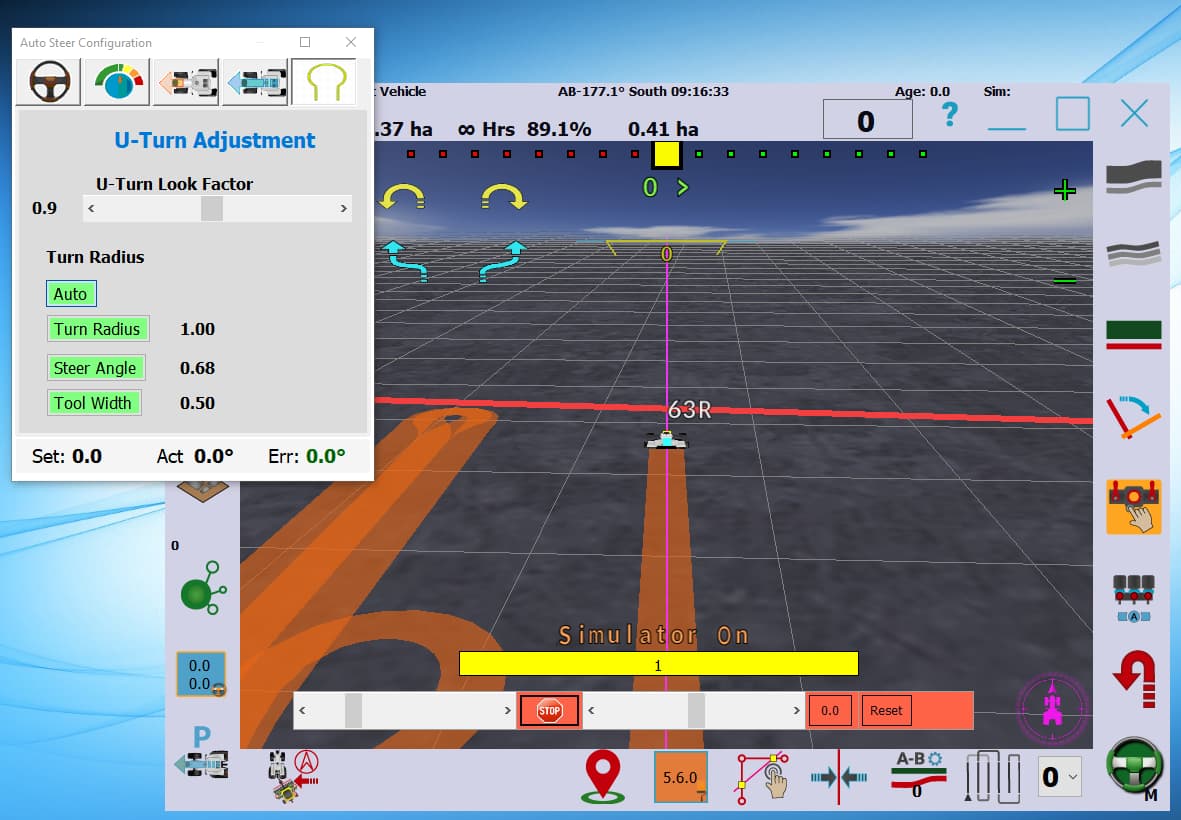
I’ve added a U-turn tab in the steering menu. The four buttons (green) force the turn radius dotted line to be built to one of the three or Auto picks the max. These are in meters and are calculated based on the settings of the tractor or steer angle. The Look factor is just another adjustment on the look ahead factor just for the u-turns. If you pick too small, it will wiggle, if you pick to big it will not make the turn. It is set to 1 as default. and currently it does not save to the vehicle. If we find this works we can add it so it will load with the vehicle. Let me know if you are able to try it. Let’s stick with pure pursuit for now. Stanley still wants to steer wild from time to time.
2 Likes
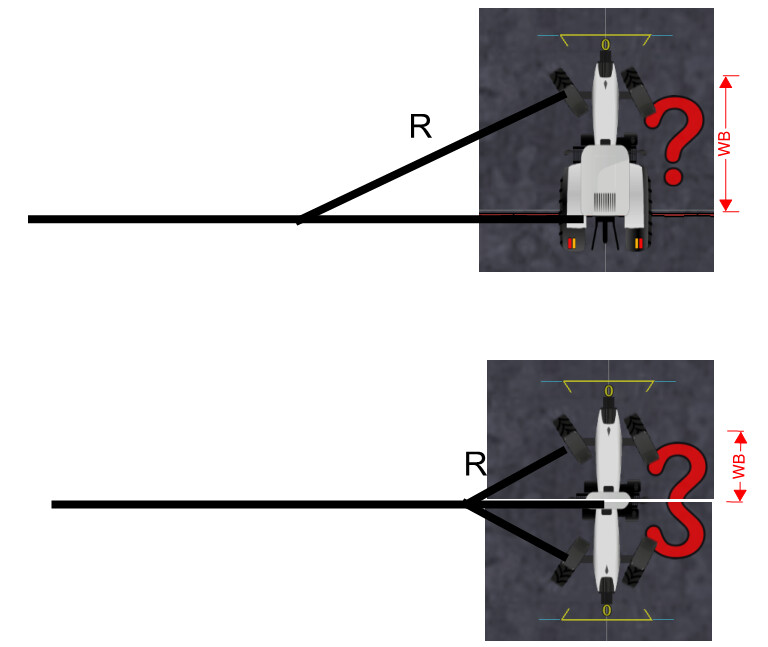
I’ll be trying it later this afternoon. Are you still thinking radius 50% of wheel base?
It should be if double steer. But in the simulator, this will turn on it self if wheel base is set to 100. At this point drawing the U-turn line is no longer the problem. In the simulator it will follow the line fairly close. If this doesn’t work, then it has to be how it sends or reads the steer byte.
1 Like