Hello, this may be a dumb question but i’m having trouble with the youturn feature. my unit will turn 90 degrees towards the next line and it will travel until the implement behind me touches the next AB line and then it will turn the final 90 degrees back on line but this is too far, it should steer back sooner to be a smooth youturn (if that is making any sense). I just finally got everything working so i’m assuming there are settings im overlooking. the machine will hunt back and forth gently about 4 inches on the line but i think thats some of the settings i need to sort out and may be making the youturn difficult. i currently have a seed drill and tank set up in it with a 4wd articulated tractor. Any advice on settings would be great. Thank you all very much for all your help so far.
Zoom way in on the screen when you do the uturn, so close that the uturn almost fills the entire screen. Watch the center of the tractors hitch and how it is following the displayed uturn track.
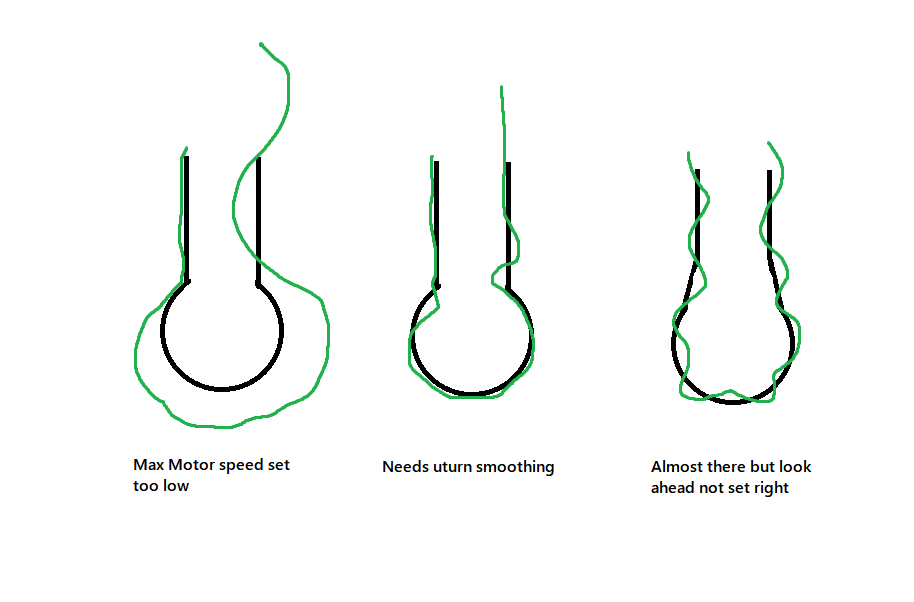
One of the most important settings for uturn is the max motor speed, it needs to be fast enough to keep up. When you turn a corner by hand look how fast you actually move the wheel its pretty fast. Keep raising max speed until it follows the curve easily.
The other setting to double check is your tractors turning radius. It does pay to drag something heavy off the hitch and measure the diameter of the circle made at the hitch of tractor. The better the measurements the better the control.
Hello,
When you use stanley, does the settings from pure still works on the back ground? Look ahead i mean.
When we use Pure it will go very slowy to.ABline.
But when we use stanley it works almost perfect and goes to the line within a few meters. But u turn is not working well.
Your thoughts??
I only use Pure Pursuit, have not tried Stanley after the first day out. I am not sure with stanely how to tune it.
With PP if you are to slow to a straight line try increasing your Motor low speed, if its too low you will be slow to recover on a straight line, if its too high you will oscillate on a straight line. Most of the straight line driving corrections never exceed the motor low speed.
Motor max speed is mostly for uTurn. If its too slow you will drift away from the u turn and not achieve it, If its too fast it will whip you uncomfortably into the turn.
My settings for PP, think are a good starting point
P 96 multiplier for the steering error entering PID (proportional gain)
Max 196 Speed for fast uturn movement (end of ramp)
Low 44 Speed for normal corrections (start of ramp)
Min 22 All pwm under this speed are ignored (control dead band)
Look ahead 2.4 Point control is driving towards (too high or too low oscillates pick the middle)
Look ahead gain 1.8 (Look ahead speed multiplier, seems to help)
deg/deg 0.5 (automatic steering degrees uphill per current side hill angle)
Integral 2 start at 1 and work up in very small increments, Increases the aggressiveness of the steering correction the longer time the error exists. handy for slippage.
Just thought id give an update. My biggest problem was i had the turn radias set to what the tractor can do and not to what it should do with a wide and long implement train behind it. I set the radias to about 70% of my tool width and now im getting nice smooth turn arounds. Thank you very much again everybody.
I’ve got upturn read on turning to the left, but turning to the right I’m going wide and coming back to the line very slowly. Any suggestions? Thanks
You must be turning quite sharp.
What is your turn radius?
I don’t know if the “flaw” is still there, but by watching the steer chart and numbers (in simulator) I noticed a year ago that when turning sharp right, then during the turn I could see jumps to the left.
If driving fast, tractor could not reach back to next correct calculated point.
I think it is a mathematical issue, like negative times negative is positive!
Turn radius is tight - it’s on my mower. Even if I skip 1 it’s still not good to the right. Better but not good.
When you set to one skip, try at same time to increase turn radius so it just turn into the skip.
Minus 1 cm, or it might make the 8 shaped u-turn.
Thanks for the tip. I’ll report back.
Which AOG version are you using for your lawnmower? AOG micro (KentStuff)
I’m using 5.0. I tried micro with no better results. I must be the in between version!
Im at 1.6m wheel base with the mower. Tuning smaller is much harder. Mostly because 1cm is so much larger a percent of the implement at 72” vs 60 feet. (Measuring in Canada is great)
Skip a swath does not give me better results unless skipping enough to flatten out the U.
U turn smoothing is needed as well, been lucky with 14
The start and end legs are set to 10m. If you watch your steer chart, the guidance seems to be in a doing what it feels like mode during the turn. Have not yet figured out if longer or shorter legs are more advantageous.
For small equipment set your fix to fix distance way down, I run at 0.3m. You need tighter measurements around a tiny circle.
To do a clean job I need 3-4 headland passes at the turning ends.
@PotatoFarmer I haven’t tried fix to fix, I’ll give that a try. ![]()
The last 1 1/2 hrs. spent finally deciding I had a nano go bad. You have to try everything beside what is the real problem first!
Last year, I made “U” turns without any problems in the aog micro version of the 100cm x 150 cm vehicle, I will try the 5.6.2 version with the same configuration.

When I get near the tablet again I will post my current tuning for the Deere 3038e, so its easier to for you to compare settings.
@whiterose I saw your video a while ago. My mower is 55" wheel base and I think what causes the problem is that the turn radius is 59" . Could you send settings?
@PotatoFarmer My mower is a JD 724 - It’s 4 wheel steer. Look forward to your settings.
Sure, I forgot the turning radius factor ![]() My wheelbase is 150 cm ( 59’’ ) but my turning radius is 350 cm ( 138")
My wheelbase is 150 cm ( 59’’ ) but my turning radius is 350 cm ( 138")
I haven’t run the car for a year, but I’m sure I got the best results with Stanley ( 1.5 - 1 - 15 ). Wheel rotation angle max. It was 25 degrees.
I wonder if using the 4WD tractor settings might also be worth a shot?
Or almost doubling the steer angle for regular tractor? But 4 wheel steer probably only activates after a half turn? Challenges.
Your mower is like a mini CASE 2470, or a modern Claas Xerion.
Good news is I got the mowing done. The bad news is the Nano that went bad was on the CMPS14 and it has also died!!! I have had my name on Adafruit’s list for a BNO085 for quite some time and I have one paid for with Digikey.
I was planning to switch to Panda when it’s ready, so all the more reason now.
I think I can change some setting and make it work well enough just with RTK, but it is a bummer.
@PotatoFarmer I’ve got it set as a 4X4. Learned that right away. The steer starts as soon as the wheel starts to turn. I can turn that around a 5 gal bucket and hit the bucket with the deck all the way around. works great for all the trees I have to trim around.
@whiterose To get the tight radius my wheels turn to 46 degrees and they tilt. One thing JD doesn’t lack are good engineers.
I’ll let you know how I get along without the IMU.