Well I know I uploaded the correct one this time.
Yes, that is a work in progress. I think I have a solution in my head, but it may not code as easy as I see it.
Well I know I uploaded the correct one this time.
Yes, that is a work in progress. I think I have a solution in my head, but it may not code as easy as I see it.
Also, code wise, in recorded path, there is no difference in stanley and Pp. Stanley was committed out some time ago, ( not by me). So, if running recorded path, it doesn’t matter what you choose, it will still run pp. Abline, curve, and contour you still have the options. This might save you some aggravation of wondering why you can’t see any difference when changing the settings in stanley and testing on a recorded path.
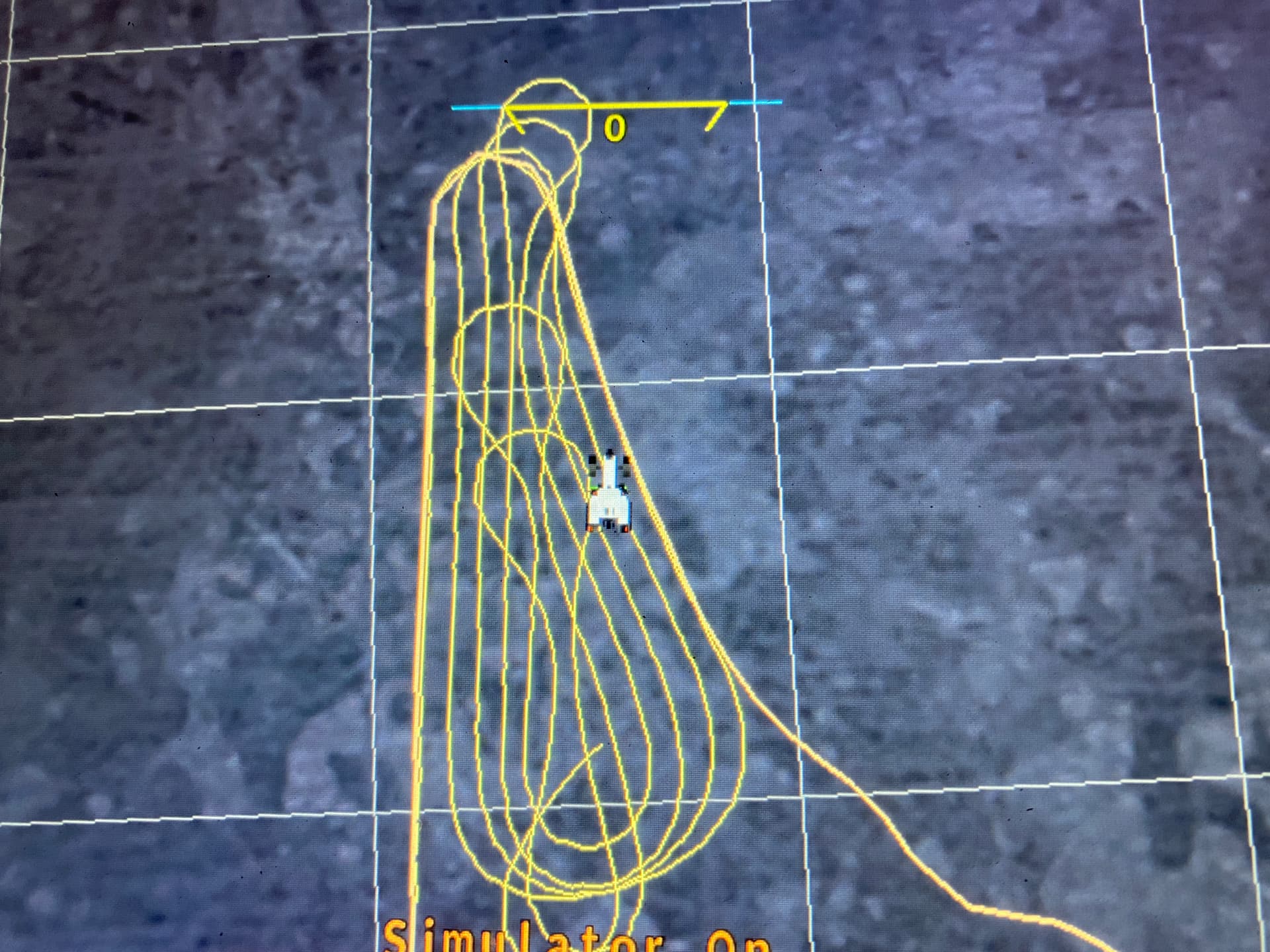
Today I tested a very tight and twisty recorded section as shown!
Even with PP Look Ahead at 1.1 it held onto the tight turns very well (using full lock on some turns), usually within 6 cm, provided I didn’t push too fast on the turns, but the speed was no less than I would manually take them. The steering wasn’t oscillating on the straights either.
Looking very good. ![]()
Only tried AB line briefly and I did have some weaving, but would you expect me to have to increase PP Look Ahead on AB, and would AB line U turn use the extra U turn feature you added recently?
That looks and sounds good. Yes,ABLINE look ahead needs to be larger than the recorded path turn. Otherwise it will wiggle. Try the U-turn settings to 1.
Thanks again for the advice, much appreciated.
Earlier you mentioned it was buggy at the moment, but so far I’ve only encountered one issue. After deleting a boundary and trying to add another, the field seemed to become corrupted and would crash AOG if I tried to open it again. I’ve not reproduced it yet, so it may have been a one off. I’ll let you know if it happens again!
The only other slight annoyance was with the recorded path approach path, where it often wanted to do a full 360 circle just before joining the recorded path even when the tractor is lined up ready. It’s not a deal breaker by any means, but if there’s a fence or something close by, it makes the start difficult.
Fantastic so far though! Thank you
Best solution to change boundaries is to change fields. Click the field button and close field and start with a new field. So much information based on the boundaries. Deleting it may not reset all the variables.
I’ve seen the start circle many times. Reminds me of a cow girl barrel race start. I think I can do a check if within ____ distance and heading is within _____ degrees, skip the lead up routine.
Marvellous! Thanks again, I’ll report when I’ve done some more trials ![]()
I think I have recorded path resume and find close point working again, and it doesn’t build the wind up if less than 6 meters from the target point. I’ve a bit more testing to do but it is close.
That was quick! Great work. ![]()
That will help my nerves a lot, as when there’s been bright sunshine and I couldn’t see the dots, I wasn’t sure where it was going to take me! ![]()
I did quite a lot of recording yesterday, and playback. The software didn’t let me down, and I would say it’s accuracy and repeatability now have my trust and am moving closer to being able to be able to have an unmanned, but supervised mow of my grass, thanks to you and all the other previous contributors!
If I could just ask you about wanting the mower engine to stop once the path had been completed. I was thinking of using the machine control to achieve that, along with the geofence on output 8. Am I right in thinking that the true/false on the end of each recorded path file line is related to the section control? What responds to the true/false state on the machine controller and what sets the true/false state in the recording?
Thanks again for all your effort and help.
I have built 1m wide electric mower it is controlled by micro2. All the recent improvements are working very well, the turns are faultless now. I rely on the geo fence on section 8 to stop at the end. I have found that this can crash the Nano if I use any other section controls at the same time, this seem to happen at the start of the uturn you have to restart the Nano to clear it and only use the geo fence on its own. I will try the new recorded path later today, thank you Kentstuff for all the improvements.
That’s very interesting @simonw , thanks for sharing the info about the nano crashing.
Electric seems the way to go. Makes everything easier to control. I’ve had some trouble suppressing noise from the Briggs Stratton magneto engine kill wire acting like a giant aerial affecting the GPS!
Does your mower use Ackerman steering?
The mower is a converted Saxon tractor mower I replaced the engine with 1800w 48v scooter motor and controller. It has 3 x 1600w 48v rotary cutter motors direct coupled.The power is from 4 x 12v 100ah lithium batteries. It will cut for about 2hrs I started with lead acid but lithium more than twice as good and last longer.As with most electric mowers the grass must be kept short hence suited to robot frequent mowing. The steering is an actuator giving 40 deg max it always worked ok skipping 3 but now turns without skips.When it can’t calculate the last turn it just runs over the geo fence and stops.I started this project during Covid lock down as I wanted to try OAGPS its been fun learning how it all works and to see an open source program become the best in the field.
The recorded path sets the drive speed to zero and turns the section off at the end of the recorded path. Both of these could be used to stop the engine. I will look further into this.
That is strange. After it does all the decision making on the sections 1-7, it simply turns 8 on or off depending on geofence. Then it saves the byte as usual and sends it. The nano should also simply read each byte and set each relay to its on or off setting. Now, if the uturn is outside the boundary, then the geofence is broken and relay 8 would shut the system down until moved back into the boundary. But that would be the case regardless of how many other sections are on. Hmm? I don’t know.
I can’t understand why this happens it may be my set up. Geo fence on its own no problem if you switch the sections on and paint the nano crashes a quarter way round the uturn. This happens with the old ino’s as well not just 5.5 ,if you disconnect and restart the machine port it clears the problem but it will not work with sections on and painting. This is both in simulator and field you have to connect a nano to know there is a problem. Not a major problem just don’t understand it,Micro2 now turning better than ever thanks.
Job done then, well almost!
I did have a play with the simulator and a machine V5.0 connected and found this to work fine. Also, not sure if it helps, but with only the machine nano connected, I had geofence and section 1 outputs working without any crashes. Not tried it with steering connected yet though.
That’s intesting it may be to do with my setup. In simulator I find when you press the orange section button on the right of the screen the nano crashes this only happens when section 8 geo fence is enabled and the machine is moving . I have tried all options without success. I have pin 1 allocated to section 8 and a LED connected to D13 on the nano for the geo fence and it fails mostly on the uturn only when sections are on and painting. Its not that important as I don’t need the sections at the moment the geo fence is what I need to stop the machine when its finished. Thanks for trying its bit of a mystery.
Which nano code are you using?
Using 5.5 but tried all from 4.6 and 5.0 all the same problem as soon as I engage the section button with geo fence after a short distance the nano stops. No problem without the fence, fence ok without sections. Just can’t understand it most likely to cash on the uturn but not always. Thanks for looking into this.
I realised that by using the section control to stop my engine, that it would stop every time I overlapped a mown part (Because I have no idea how to keep a section on until the end of the recorded path otherwise), so I have now just added a line to turn on and one for off to the arduino steering module code to change an unused output if the steering is turned on or off (which happens at the start and finish of recorded path.
if (watchdogTimer < WATCHDOG_THRESHOLD)
{
digitalWrite(AUTOSTOP_PIN, 0);
The only problem now is knowing if I can route the geostop through to the steering module, then I wouldn’t have to use a machine module at all at this stage. Any clues are very welcome!
Thank you!