Is this what you are wanting? Remember, the radius is drawn during the building of the u-turn. But this will change these values for the next turn.

2 Likes
Thanks Kentstuff I think it could be helpfull, it’s getting late here in UK I will give it a try tomorrow.

I have had several trails with this version in the field and it is now working very well. The turn to the right is spot on,the left turn a little over steer, I tried adjusting the Ackermann and lost all my settings. to improve left turn I have set uturn look factor to 1.8, the look factor really changes the way it turns. So well done and thank you Kentstuff a much improved uturn for small machines with Micro2 and thanks for adding geofence.
1 Like
I’ve been working on adjusting the simulator to react more like actual steering. Currently if the steer angle is required to jump large amounts, it simply just jumps to that amount. In the vehicle, it takes a second or so to adjust the angle. You can really mess up a u-turn with slow steering. If you find that it is over steering really badly, increase the radius, or make it steer faster.
1 Like
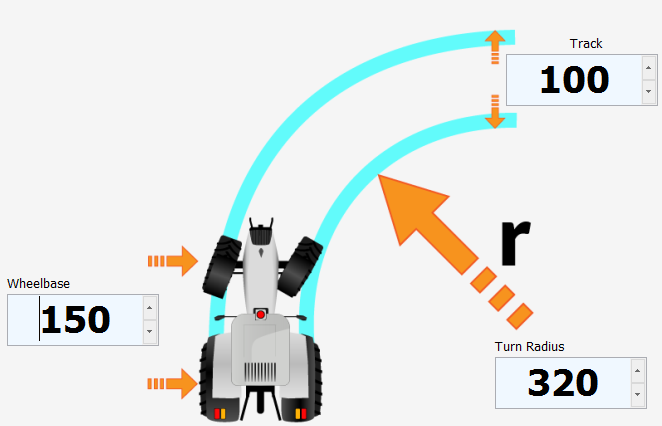
Dear KentStuff Thank you very much for your effort for Micro2, I have difficulty in translating some terms due to my language. I would be pleased if you list the important settings that I need to pay attention to for my vehicle with a track width of 100 cm, a wheelbase of 150 cm, a maximum wheel angle of 25 degrees (PCBv2+ 1 base and 1 rover simpleRTK+ BNO080+UDP).
And you said: “Set your turning radius at least 1 cm larger than your wheelbase.”
-Since my wheelbase is 150 cm and my turning radius is 320 cm, should I set my wheelbase to 151 cm?
- I plan to drive my car between 3 kmh and 10 kmh, should I use stanley or PP?
-Is there anything else I need to tweak?
-I don’t know what the u-turn numbers mean in the photo I shared below, the numbers I specified as A-B-C and u-turn Adj. What should the numbers be?
-And my last question: when I turn this vehicle into 4-wheel steering, will it be enough if I just change my turning radius?
Sorry for the long question, you don’t need to answer right away, when you are available… Best regards.
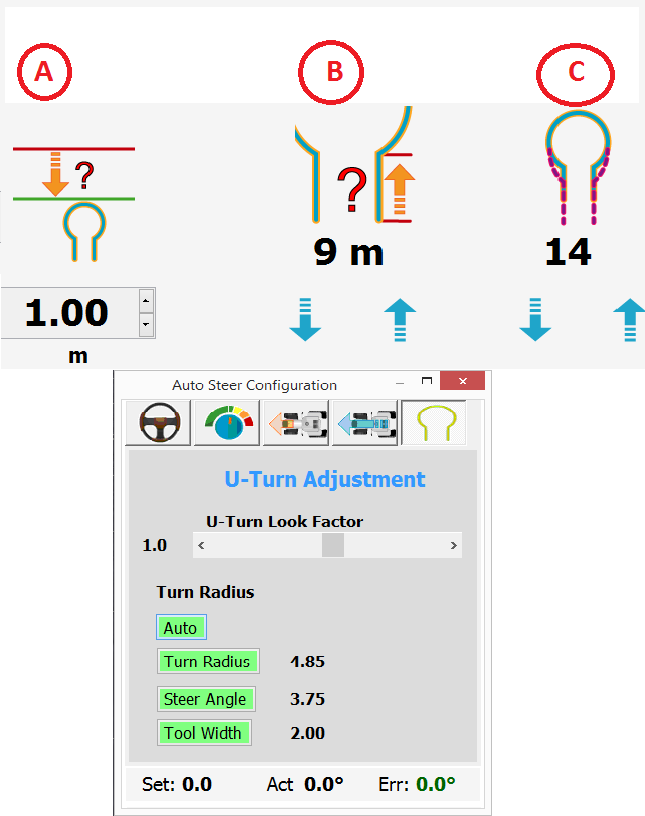
A- distance from boundary to center of turn…
B- how long the leg extensions are added to the turns.
C- smooths or straightens the sharp turns returning into the ABLine.
Micro2:
A- is important to be set large enough to say inside the boundary. By default the smaller tools will overshoot the turn line.
B- since we now count up through the turn, these can be made longer to keep the vehicle driving with the aggressiveness of the u-turn a bit longer. In the latest release of AOG, these are not applied to a manual u-turn. I added them back in for the Micro2. If too long, they shut off the automatic u-turn if manual is pressed. I’ve made a change on my latest that gets around this. I’ll upload it when I get some other bugs working.
C-this is useless in Micro2. There are too many points in the turn for this to be effective.
Settings:
Wheel base- by the math, longer wheel base has to turn sharper to make the turns. If you find your vehicle is not told to turn sharp enough, one cheat is to make the wheel base a little longer. Any wheel base less than 1 meter, starts to give problems.
Turn radius- on smaller vehicles, you will want this larger than needed. This will typically be the controlling factor as to the size of the u-turn circle drawn. If looking at the u-turn steer screen I added, the middle value is as tight as your machine can turn if everything is perfect. You need to set your radius higher than this. It controls many of the other calculations. If this value is too small, your vehicle will never follow the drawn curve. This is the most important setting for all smaller vehicles.
Track- this value is not part of the main AOG version for calculations of turn radius. For tight turns and small turn radi the width of the tractor can be half as much as the turn.
As I have stated, pure pursuit is the current best working solution for smaller vehicles. I recently had a break through to get stanley working just as good or better. It will be part of the new upload.
25 degrees- that just isn’t much turning. Set max steer angle to about 10% over that. Then look on the steer u-turn tab I added. The middle term will give you the best your cart will turn. Set your turn radius higher than this.
If your machine is starting the turn and then just drives off unresponsive, turn radius is too small and the vehicle is trying to steer to a spot that is behind the vehicle. Set the radius larger and drive to what it will.
Time delay is also critical for small vehicles. You can be past your turn point before all the steering is done. Slow down at turns. 3 to 4 kph is about maximum.
People have had success with a look ahead about 2.
The overshoot reduction seems backwards. Set it to 1 and leave it alone.
Intergal. 1 or 2. Much over this and it never finds the line.
There are many changes in each of the uploads. I keep making tweaks to the steering algorithm. Some more big ones coming. I will post here when I upload it.
Maybe some of this will help.
Edit: radius larger than wheelbase. Not the other way around. Just don’t set them all to the same. And same as tool width. It does some funny circles. Actually never set radius to half the tool width. For example if tool is 100, the radius should never be 50. Same with 200 and 100. 51 is ok, 101 is okay. But you should not have this problem due to your larger turning radius.
1 Like
Just wanted to thank you KentStuff for the sterling work put into Micro2. I’m using it on a 130cm wheelbase mower and it’s performing very well! Tweaks needed here and there on my side, but very happy.
One thing I did note recently was that after turning VTG off any sharpish turns while doing a recorded path resulted in very notchy zig-zag path recording on the turns. Turning VTG back on made the turns smooth once more.
Yes, VTG is going to be important. Many using panda have tried without it and have mixed results. I’ve not noticed a common reason why it works for some and not for others. Micro2 Recorded path is also getting its steering algorithm modified. It will be coming soon.
Edit: Welcome to the forum, and thanks for the input.
Goody-Goody!!
1 Like
Thanks, and looking forward to trying out your next release!
Here is an update. It is a bit buggy. But need to test recorded path. You will have to set the PP lookahead pretty low to follow the tight curves in the recorded path. Much lower than the standard ABLine and U-turn. In the current version of AOG, record path allows you to resume. This function currently is not working in Micro2. If some of you want to try it out and let me know. Stanley U-turn has also been re-worked. Please try it as well.
Again, If running recorded path, set PP lookadhead low, if just doing ABLines, curves, and u-turn, set it a little higher. I can standardize it later. Just need to know if it works or not.
Edit: This was the wrong link. See the updated link below.
Thank you for your excellent work. ![]()
I’m away at the moment, but hope to test in a couple of days ![]()
I managed to do a small test on the recorded path yesterday and it seemed to be managing to keep tighter to the path on turns than previously. I still have to experiment more with the settings as I was getting some oscillation on the straights with the PP look ahead too small, although even at 1.8m it wasn’t too bad on the bends.
I noticed that on the simulator it tracked much better if I reduced the antenna distance from the rear axle from my real world setting of 120cm to around 50, so I will try that on the mower.
Also on the simulator I noticed that the resume path from last position does actually work, but not tried it on the mower yet.
Stanley seemed to be very similar to PP in performance, which was good, but need to test more.
There is a ‘green’ area with AG Open written on it when opening a field which I can’t seem to get rid of!
Weather permitting I’ll try to get some more testing done soon.
Thanks again!
In simulator you should set antenna just above pivot point, up to 10 cm in front of the pivot point.
1 Like
Cheers for that!
If there is a green paint in the field that says agopen, that is the wrong program and explains why the recorded path resume works. That is the image planner branch. I must have compiled the wrong branch. I’ll fix.
Thank you ![]()
Here you go. This link should be the Current Micro2
1 Like
Thanks again!
Had a little play with it earlier, but had other issues with intermittent loss of usb connection on the gps , but from the time it was working I found it to be very good following the recorded path on the turns with both PP and Stanley. I think Stanley performed extremely well in my case, keeping within ~ 6cm during ~ 2m radius 180 degree turns at a moderate speed. Nice to see the red points on the path too.
I need to do more testing, but please let me know of any specific tests you would like me to try.
In my case the resume path would be useful to break off for grass collector emptying, but I know you mentioned that would be put right later.
Overall I would be more than happy to use micro2 as it is now, as far as the current steering abilities go. ![]()
2 Likes