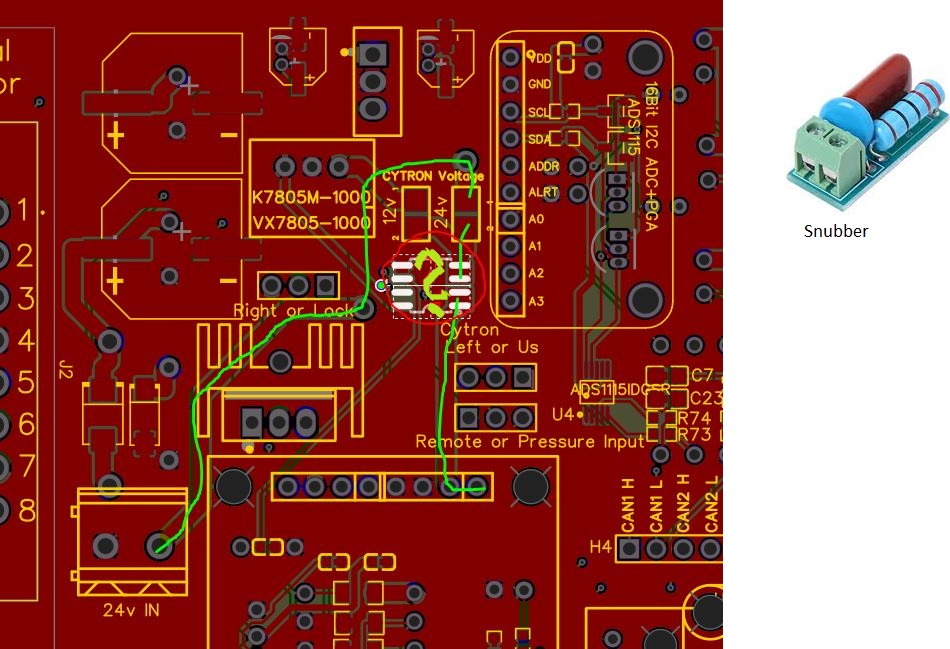
I would also power the Cytron directly. What amazes me is that all the power for the Cytron has to go through this tiny chip (ACS712ELCTR-05B-T) I have no idea if it does anything good or if it can be bypassed. Maybe someone with a clue can say something about it. I have Jake Hunter’s first Teensy PCB up and running. If there are very fast steering movements, the Teensy sometimes rebooted. I will try to make the supply of the Cytron as independent as possible. And will add a snubber.
1 Like