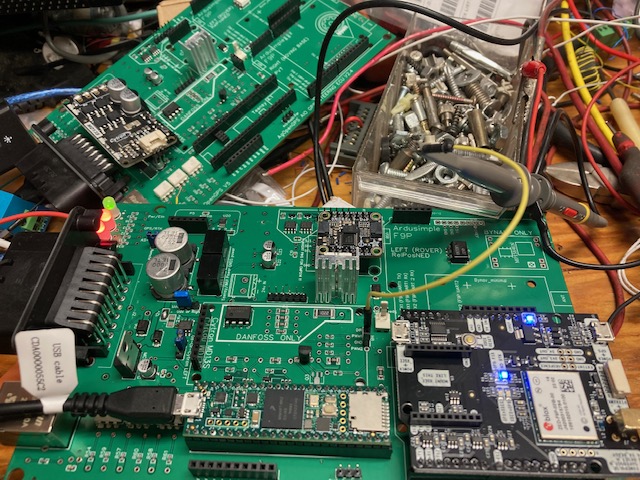
So i have all in one board V2.5 i got everything working but the steering
i’m running a danfoss valve is the plan
i have it on the test bench i’ve got a scope hooked to PWM pin for the cytron
the jumpers are set per the pdf that come with Agopen
i have teensy Autosteer_gps_teensy_V5_5 loaded
i can see my angle sensor read was runnig through the setup wizard and got to the point to see if the steering is correct and i’m not getting any signal on the AMP plug pin 5 with scope
so i followed it back before the TLC081 and checked still nothing check at pin 4 teensy and nothing there so not getting PWM from the teensy
made sure i have the jumper right and in the software i have the danfoss valve selected
Is there anything else on has to do to get and output ?
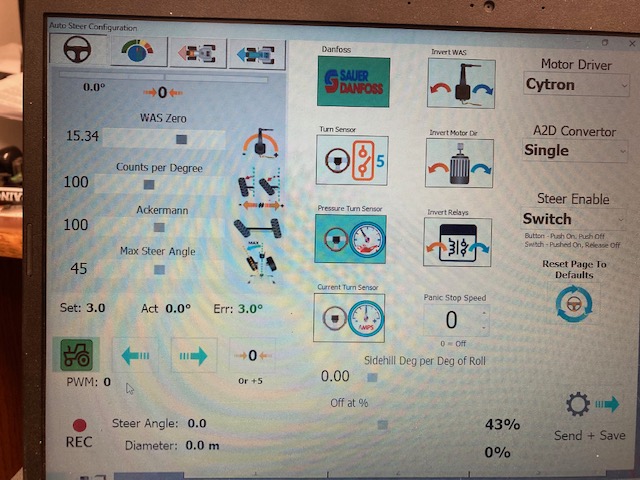
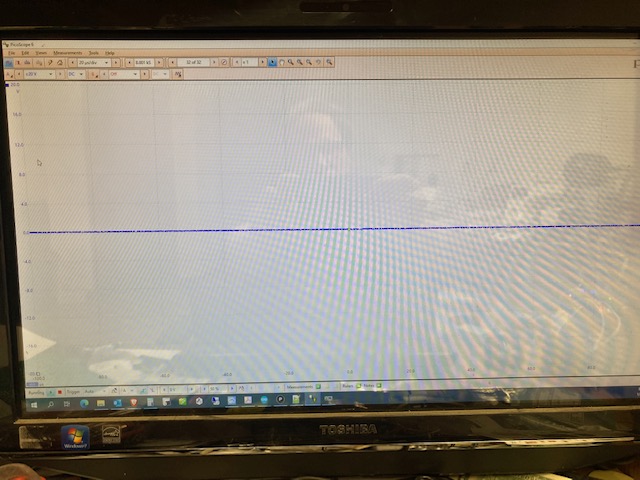
Nothing i do sets a PWM signal on the pin or on this screen is there something that i’m missing