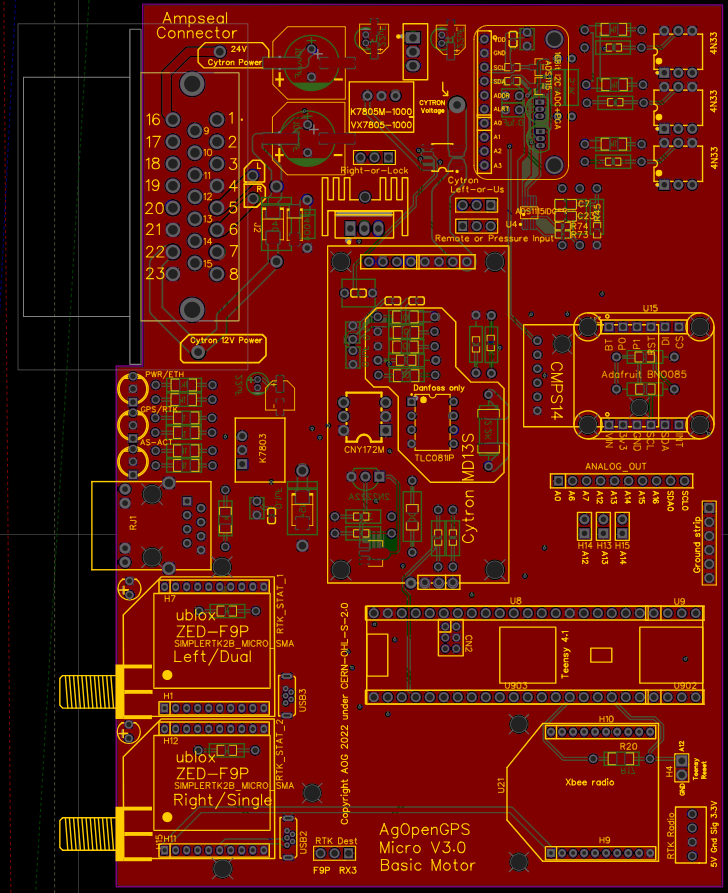
Nice work. This is good news for a lot of motor users. The V3.0 board above has 2mm traces on 3 layers and should handle most motors. It still needs the jumper wires to the pad eyes provided for full amps on big motors.
I deleted the CAN bus from this more basic version and used pin 16 to input 12v or 24v straight to the cyrton. or the 12v board input can still be used for 12v motors.
3 Likes