Another first time build here. I’ve followed AgOpenGPS on and off for about a year now and decided to pull the trigger and start building. So far I’ve ordered Dual GPS V5_v2.4 Std AMP boards that I pulled from repo GitHub - farmerbriantee/AgOpenGPS_Boards: Hardware PCB and firmware for AgOpenGPS Software on Feb 26th. I’ve got my first board nearly complete and have a few questions.
A little on my setup:
I’m planning to run this on a CaseIH 7220 2wd that primarily runs a sprayer and grain drill. It will also run a corn planter and do occasional tillage. We typically drill and plant at the same time so once I have one tractor up and going I’ll start into the second one (CaseIH 8910). I’m planning to run the Phidget 3269_3 24v steer motor on the first one. Eventually I’d like to get the baraki valve and go hydraulic.
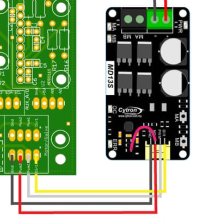
Anyways I’m to the point of mounting the Cytron to the board and digging through discourse it sounds like there has been some evolution in this area since these boards were designed (looks like I should’ve grabbed files from the google link or waited a little longer). Based on the board I have, tractor and motor combination, what board/Cytron modifications should I consider? I’ve seen the board traces bypassed, but saw a recent posted that that may not be necessary with the motor I’m running and I’ve seen the Cytron freewheel mode done multiple different ways. Currently I’m planning to solder an 8 pin header on the one end of the board. On the other I would like to use the cable that came with the Cytron and solder the other end of the cable to the board. Use standoffs to support that end of the board. Should I just remove the 3pin hearder from the board and connect there or is there another spot? Then planning to remove the two components off the Cytron and add the jumper from NC. So basically following the Kaupoi v4.1, just on the AIO board.
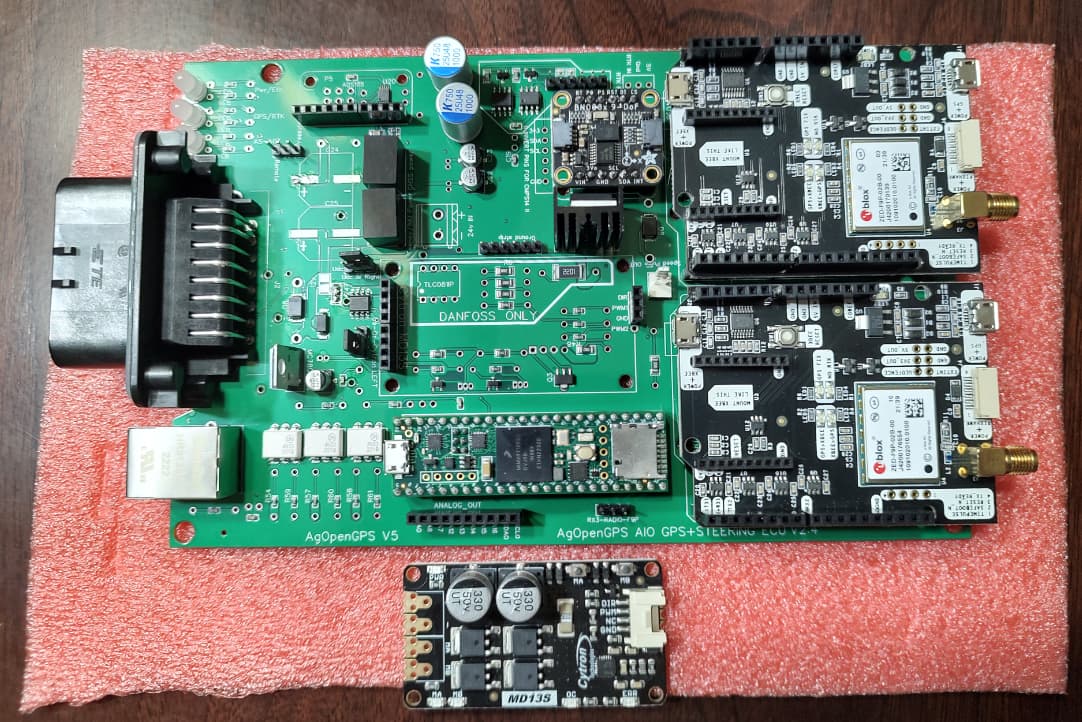
This is the current state of my board:
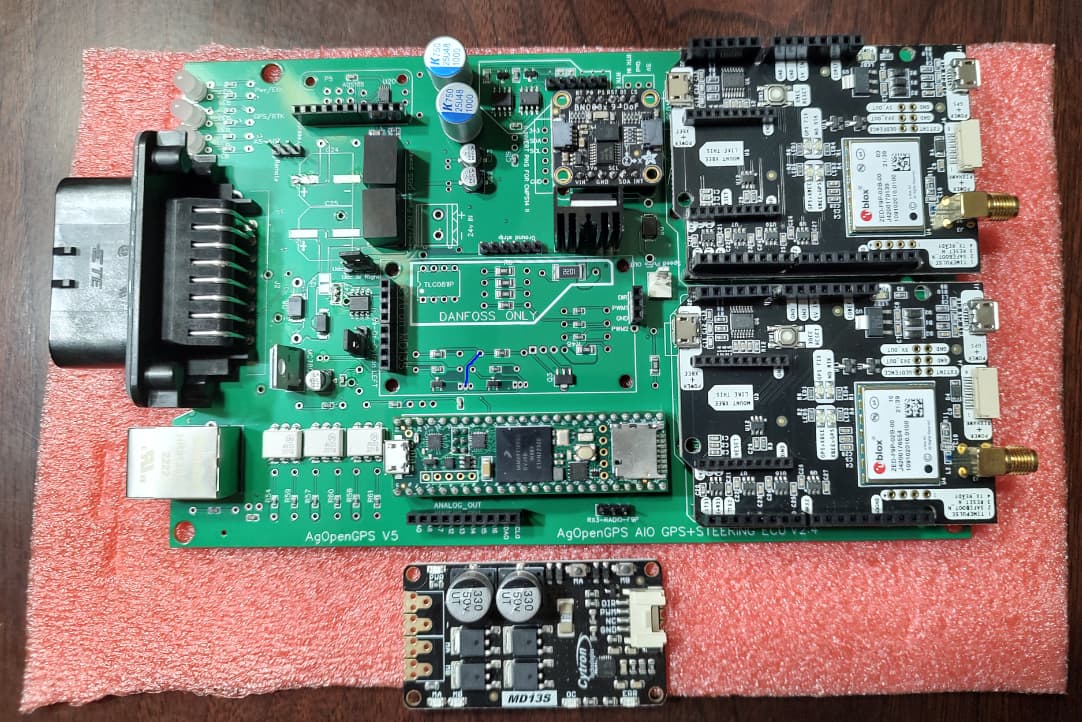
I also saw one post with a wire added in the below location. Is this needed?
Thanks in advance for your guidance! I’ve got more questions, but I’ll limit this to the motor controller for now.