The Teensy Sketch V5_5 from github AgOpenGPS Support Ortner doesn’t work, VTG is missing.
The configs Files_Tony from the support Ortner work untouched.
Could you send a link to that sketch?
It’s on github, v5fixes, under support, basic panda GPS, firmware, autosteer_gps_teensy_5.5
Ok everyone thanks a lot. Agio is working and the udp is working. The steer module is green but the gps is not green. It does show that bytes are coming in though. Does it need rtcm corrections or how does this work with the all in one board?
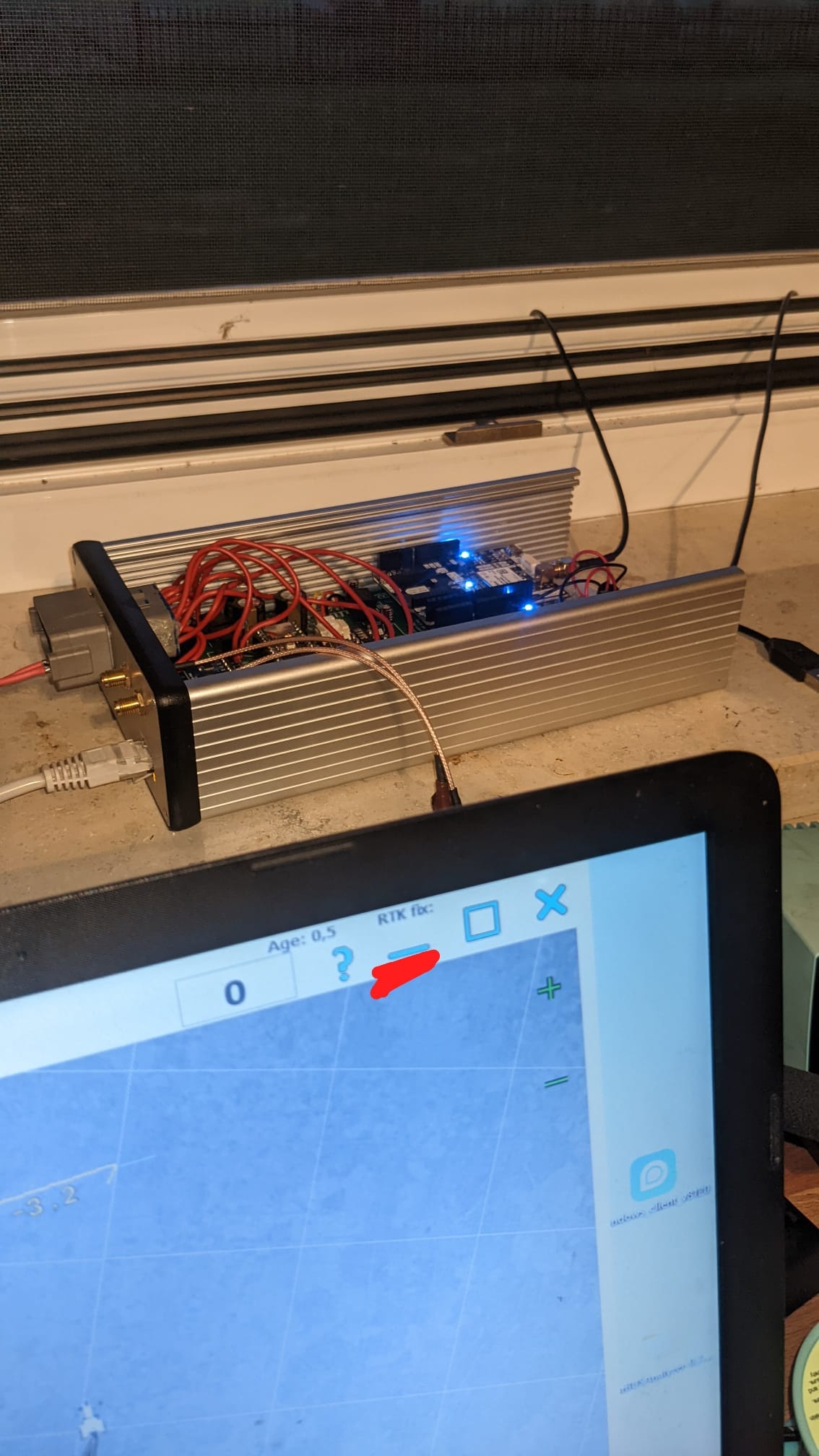
Does your left f9p show to have rtk? Blue “no rtk” is off. If not check module settings.
Make sure uart1 on both modules is 115200 baud rate
Uart2 460800 on both
Right PVT module make sure rtcm3 is on in the uart1 message out
Left RelPosNED module rtcm3 is on in the uart1 message in
I am working up the parts for this board. I can’t seem to find a complete parts list anywhere. I downloaded the EasyEDA files and they are helping.
Interesting thing is the Designators on the schematic don’t seem to match up with the board.
Is there a better data set somewhere while I plod thru this.
Have you ordered the boards yet. We are making some improvements at the present
Ok, so I changed the configuration of the receivers and now agio shows that everything is working. The steer module and gps are green and both are sending and receiving data. I still have some questions though. Is the left f9p “no rtk” led supposed to be on or not? Also, is it important that the left antenna be hooked up to the left f9p and the right antenna to the right receiver?
the No RTK light should go off after a minute or two. It receives rtk from the right antenna module. If it stays on you have some settings to play with.
The left antenna needs to be on the left side. That is your direction. You will be in reverse all the time if its backwards.
Yes, I have boards. I was also going to make some changes to add the IMU and the current sense board as add on sockets to the board. I am going to just us VHB and standoffs to affix them to these and run wires to hook them up.
I am not going to run these as dual at the current time. I just want the flexibility if I decide to go dual in the future.
1 Like
Do you have any pointers as to what to change. Settings in agopengps or configuration of the receivers?
What is the power rating for the 47 ohm R8 resistor.? I don’t see it on your lists and it is not stated on the EasyEDA files.
Most people just use a jumper. All it does is supply 12v to the 3 pin autosteer, implement & remote headers, and the 12V pin there is only used if your switch has a light in it.
1 Like
Thank you for the feedback. I wasn’t sure the purpose. I saw that it was in the 15V line so I assumed it was just a small throttle but 47ohm is not much of a throttle so it then becomes a pretty large wattage to take 15V across the resistor.
The resistor would protect against a 12V short to ground on those headers.
1 Like
I use Franz Hush configs. Github jeep1945 dualheading.
Then turn all constellations off except GPS, glonass, and galilao.
Set baud for uart2 to 460800 on both. Make sure uart2out and uart1in has rtcm3 selected on right module.
Make sure uart1in has rtcm3 selected on left module, and nothing selected on uart2 out.
Franz has MSM4 messages selected for rtcm3, so they will be fine as is.
That should get you going.
Thank you very much for the information. I am quite confused though. With default configuration on both receivers the only thing changed being right receiver: rate changed from 1000ms to 100ms, hz 1 to 10, uart1 message out changed to rtcm3. left receiver: rate changed from 1000ms to 100ms, hz 1 to 10, uart1 message in changed to rtcm3. In this configuration it communicates with agio and is green but no rtk, but when I try franz hush configuration I can’t even get it to connect with agio. I am running github, v5fixes, under support, basic panda GPS, firmware, autosteer_gps_teensy_5.5 on the teensy.
Maybe this is a dumb question but do these receivers need xbee wifi ntrip masters?
No, I use rfd900 radio. You will need some form of corrections to get rtk in AgOpen.
Remember you have rtk fix in the left receiver from the right receiver, but to have rtk fix in agopen you have to have fix in both receivers. But you can operate without rtk fix from corrections, you will just lack precision.
I’m running the Franz with the same ino and v5fixes and is good. But whichever works for you.
You must have Nav PVT enabled in messageout in right receiver, and Nav RelPosNED enabled in left receiver or it will not function as dual.