You could, providing the voltage is correct. Your microprocessor runs on 3.3V or 5V, and I would assume your nozzle uses 12V. What are the specs on your PWM nozzle? Do you have a data sheet?
1 Like
Oh, ok thank you. I missed what you said there about A0.
The nozzle works with 12 volts and max 500 mA. (connects to the drip breaker section), unfortunately there is no technical document. But I’m thinking of driving it with an optocoupler or a mosfet, or a PCA9685.
At 500mA I wouldn’t recommend using a optocoupler. I would use an N-channel mosfet providing the ground for the microcontroller is also feeding the mosfet. Good mosfets for this application would be IRL520 or IRLZ44 if you have a 5V microcontroller.
3 Likes
Thank you, I decided to go with the IRLZ44n logic mosfet.
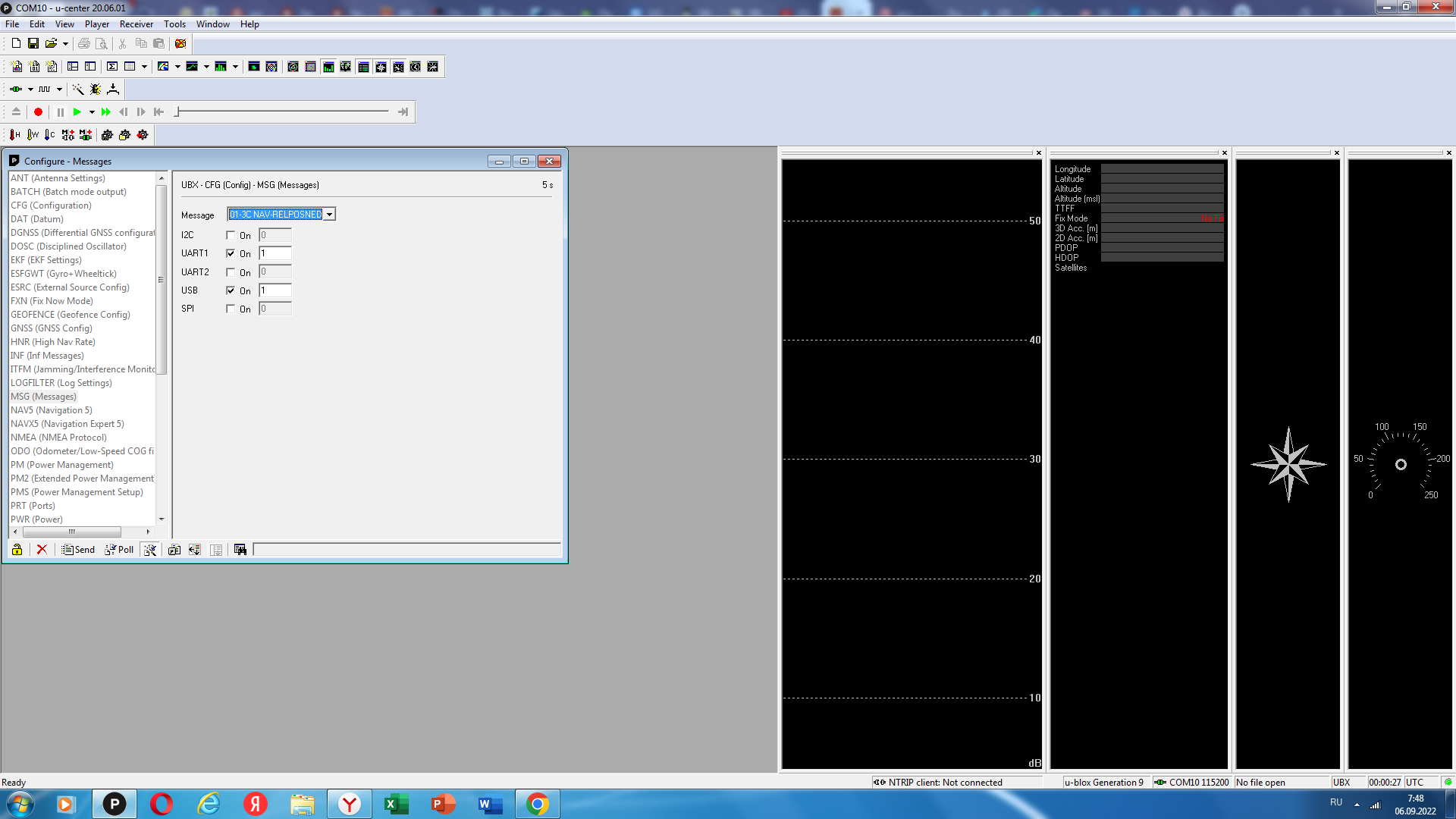
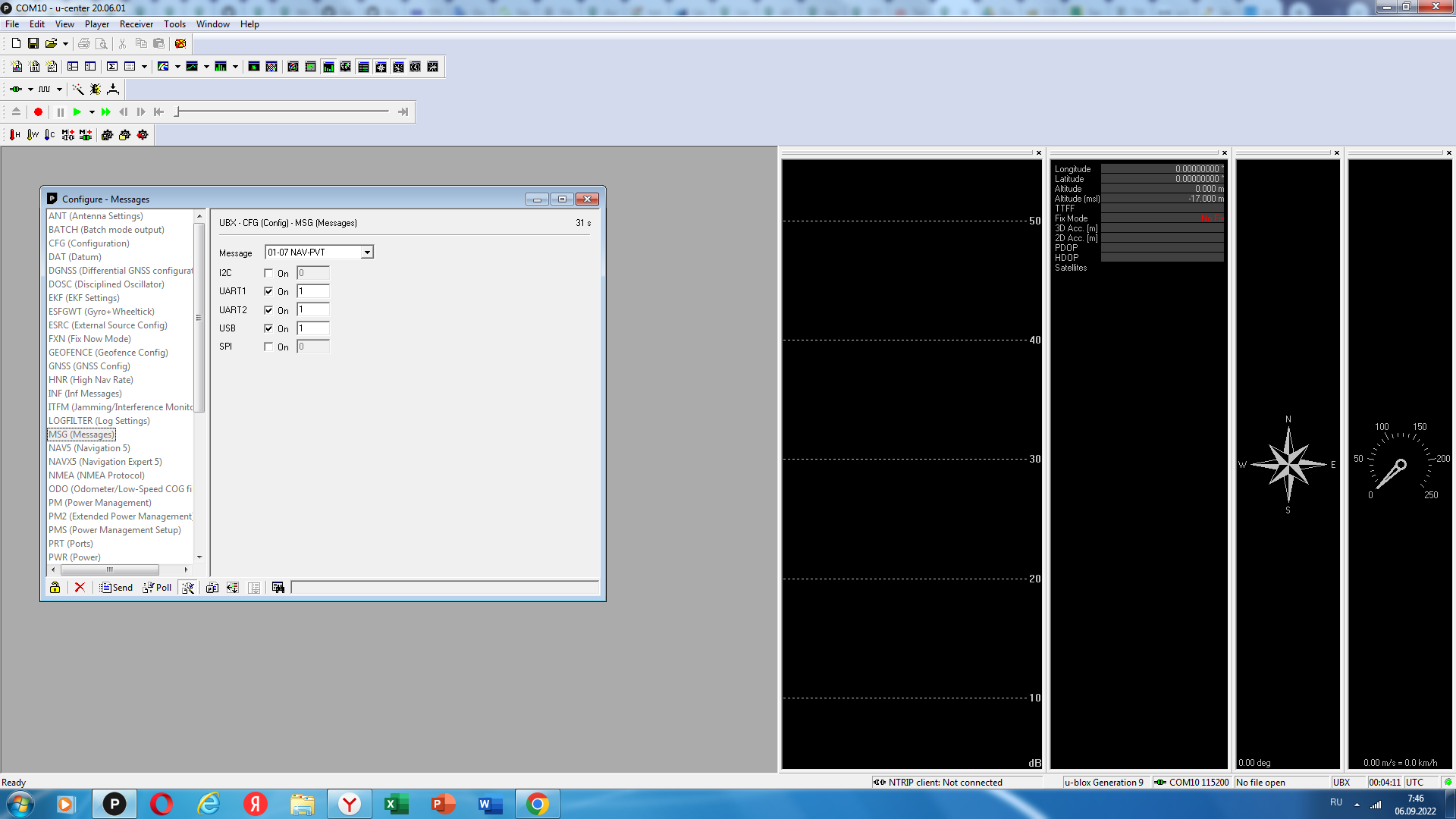
So far, it is not possible to launch a double antenna. In the modules of the left and right antennas, I filled in the configurations from the support folder. I began to re-read the topic and saw that the indicated messages should be included. I connected to the modules, but they are not included on more than one port. Which uart should be connected to which port?
What message, on what port.
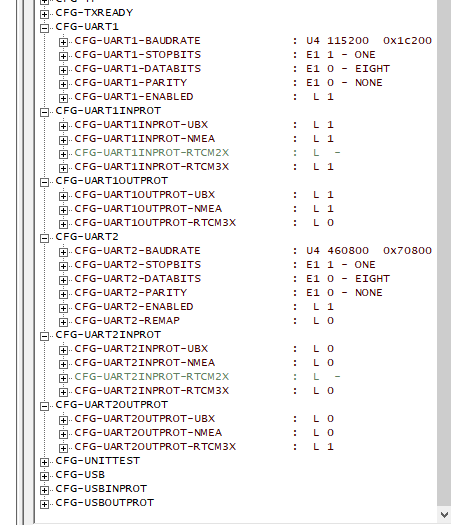
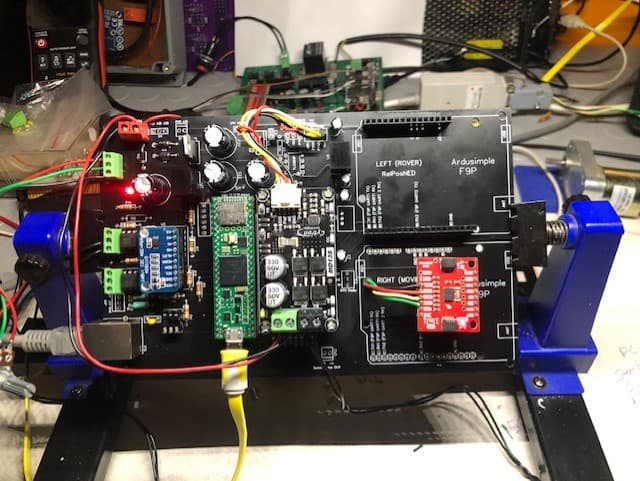
Right module settings
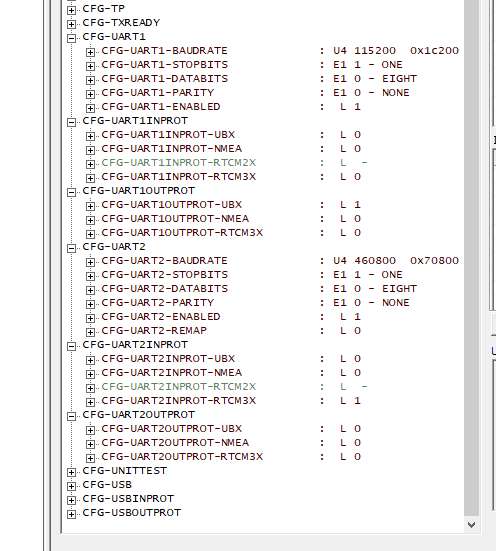
Left module
https://drive.google.com/drive/folders/1787PlVQOIqViQKA-HZ2MmVpuV02vm7Ds?usp=sharing
Here are my configuration files
2 Likes
thank you very much
Hi Jimc, I installed the same configuration as yours, but BNO does not work, I tried 2 Bno, their addresses are correct, the was and steer button are working, I am running udp, where am I doing wrong.
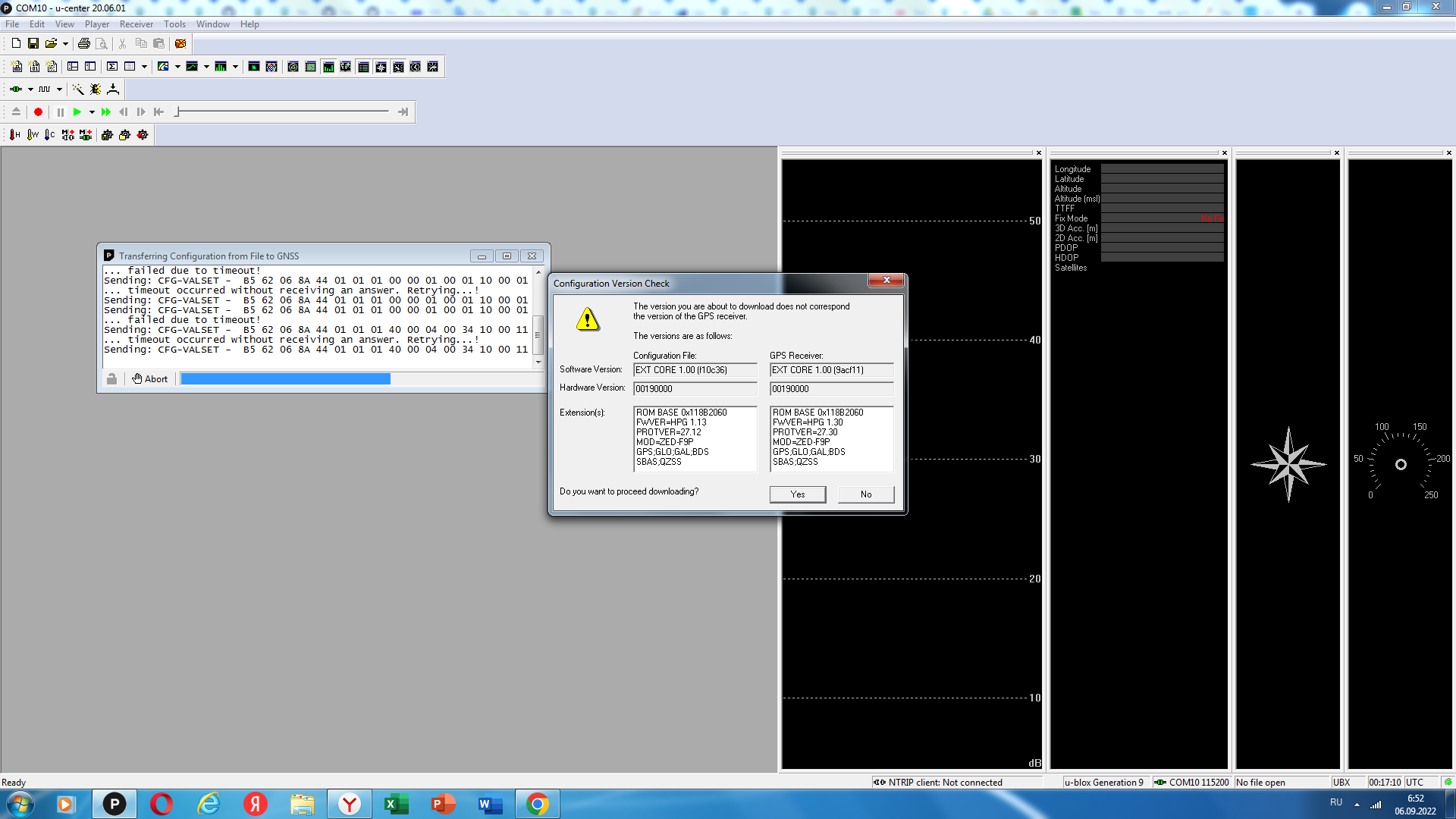
The configuration was filled in the right module normally. And on the left it gives an error. What is the configuration file with firmware 1.13. I have 1.30
The tractor is still in the opposite direction. When you set point A, information appears: An unhandled exception in the application. The value 65535 is not valid for “value”. “value” must be in the range from “minimum” to “maximum”. Parameter name: value
In the upper corner on the screen, just these values. Where could be the reason?
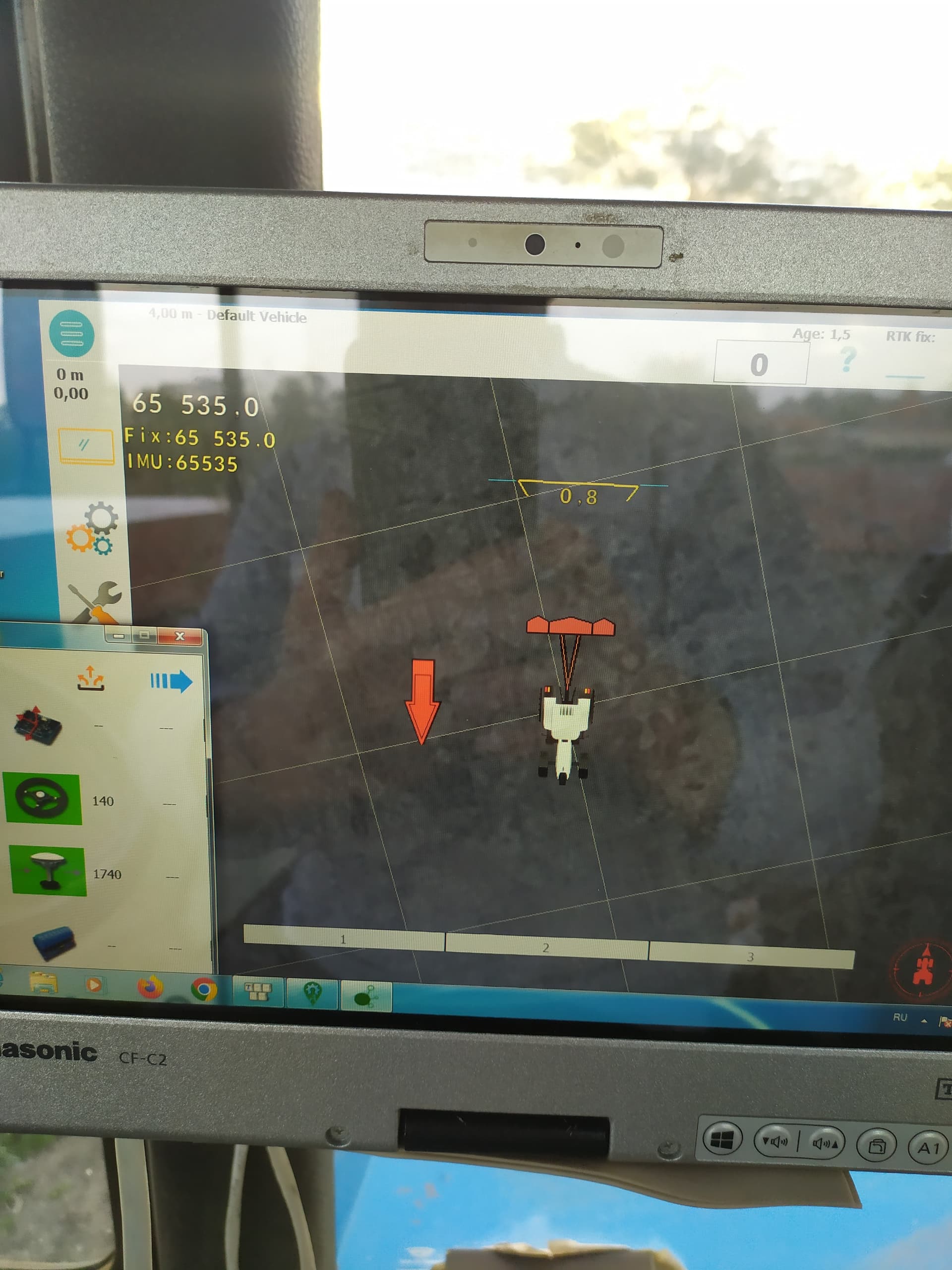
That will flip your tractor around.
Try creating a field and set AB. If that doesn’t work, have you deleted aog and agio from app data, and reopen aog?
If you can’t get the reverse arrow to go away when you drive forward, it’s normally the antenna wires are backward.
1 Like
Thanks, I’ll try to do something. Now I will install antennas on the bar on the street, I will try. While removed from the tractor.
The .ino looks for the BNO on a different I2C port than the ADC. Make sure the wires are connected to the correct port on the Teensy or change the .ino to look at the same port as where you have the BNO connected.
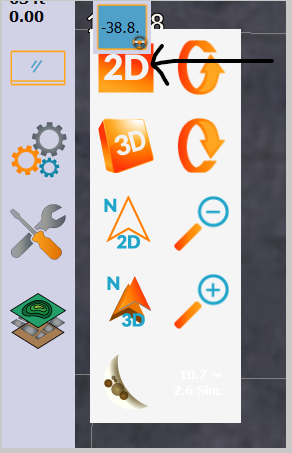
Turned the rod with antennas 180 degrees, the tractor turned into the correct position. I turned back again, the tractor remained in the correct position. Only the IMU data has changed. Tomorrow I will install it on the tractor again. 2D mode is on and was. I had to restart the program.

Are you using single gps, or dual as imu? With true dual you wont have the imu data in the top left
1 Like
The BNO is connected that way, and I’m sure it’s intact, its address is 4B.
#define BNO080_DEFAULT_ADDRESS 0x4B
#define ImuWire Wire //SCL=19:A5 SDA=18:A4

1 Like
I don’t know much about panda yet, but I think that if you don’t have the antenna connected you will never see the BNO values, since now the BNO doesn’t go directly, everything goes via panda, therefore you need to have a GPS+BNO signal to get to see the inclination on the screen.
and try taking GND straight from the teensy.
1 Like