Thanks Juan, I’ll try this, ok I will use my own base station (simplertk) and transmit my RTK signal from base to rover, most people here are using NTRIP, so what files would you recommend I upload to my simpleRTK boards for base and rover?
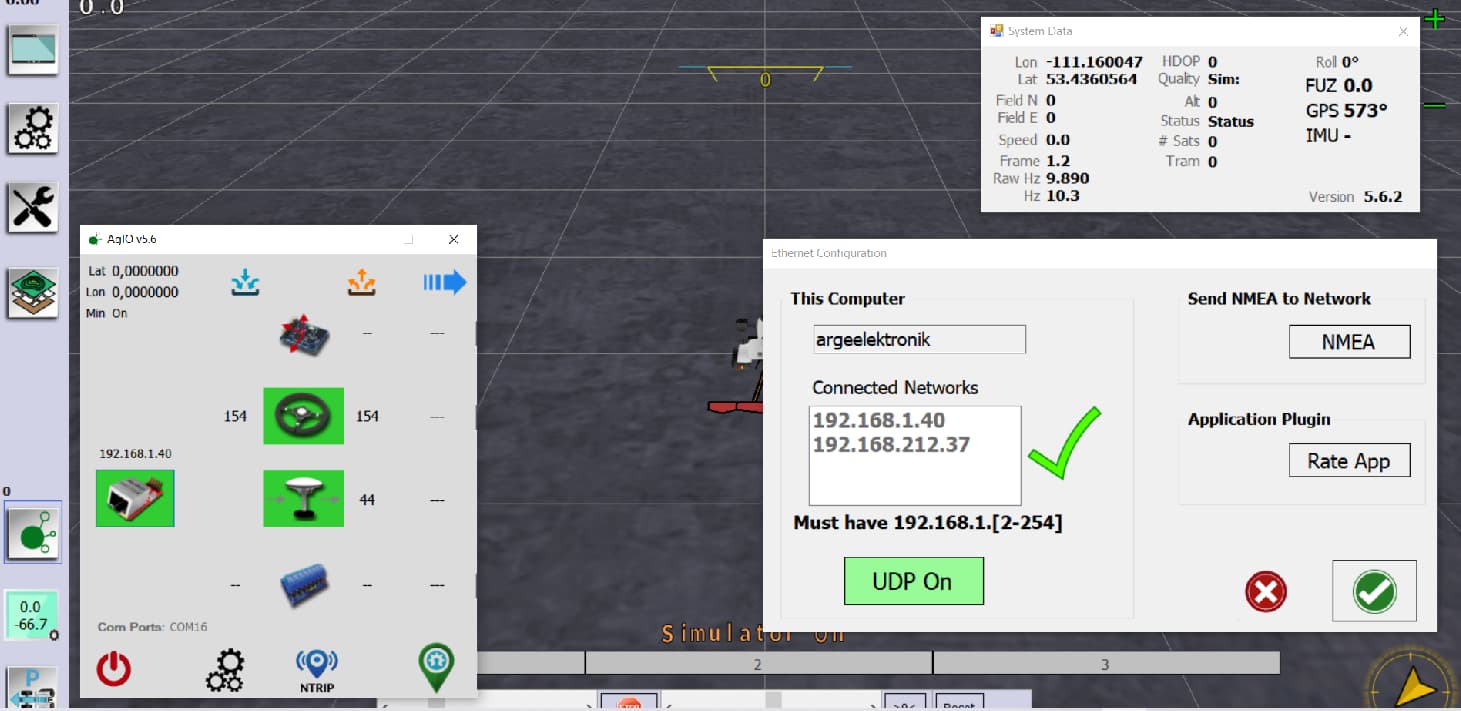
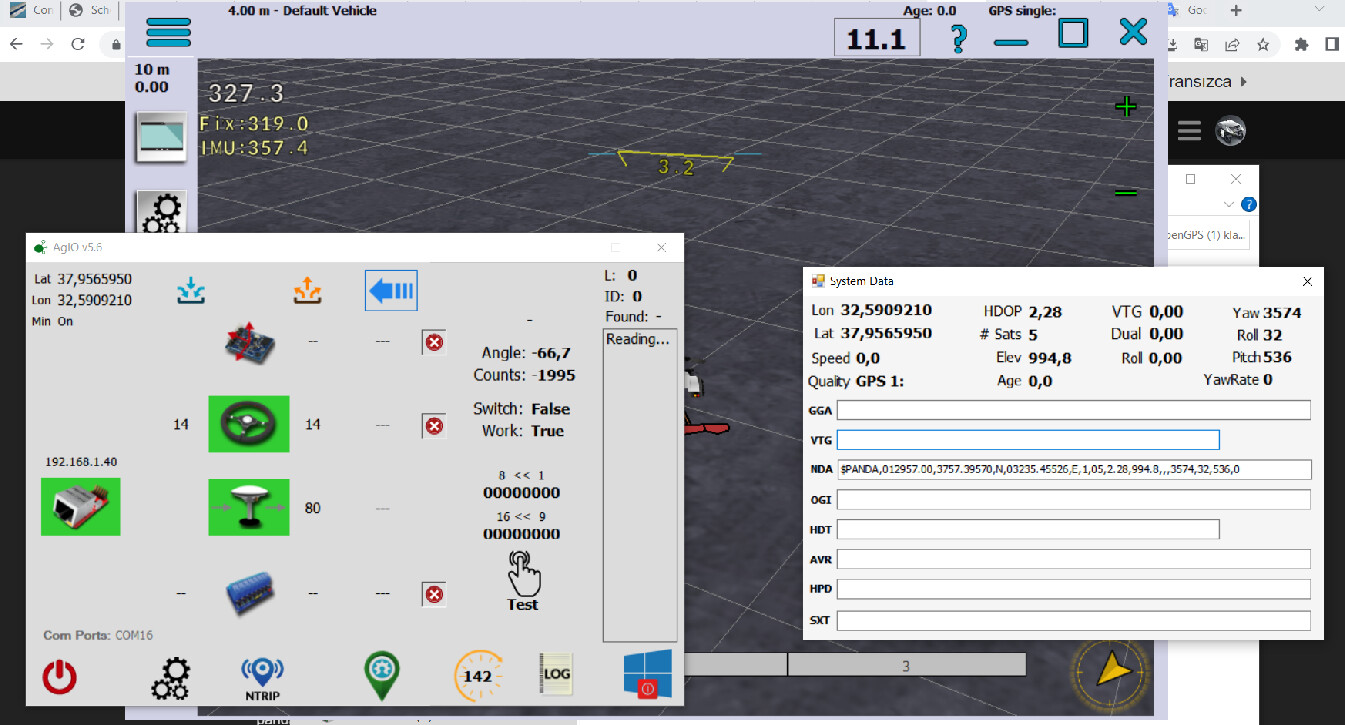
It shows in the AgIO screen that you are not connected to the panda/gps part of the board.
I had to change IP addresses in two places in the sketches for it to work. You can see that you are not getting connection to the panda board via UDP because it is not green in the screen. The steering is green but the GPS antenna is not.
It is probably because you are in simulator mode.
2 Likes
I hope it’s because I’m in simulator mode, I’ve been struggling for 2 days to get BNO data ![]()
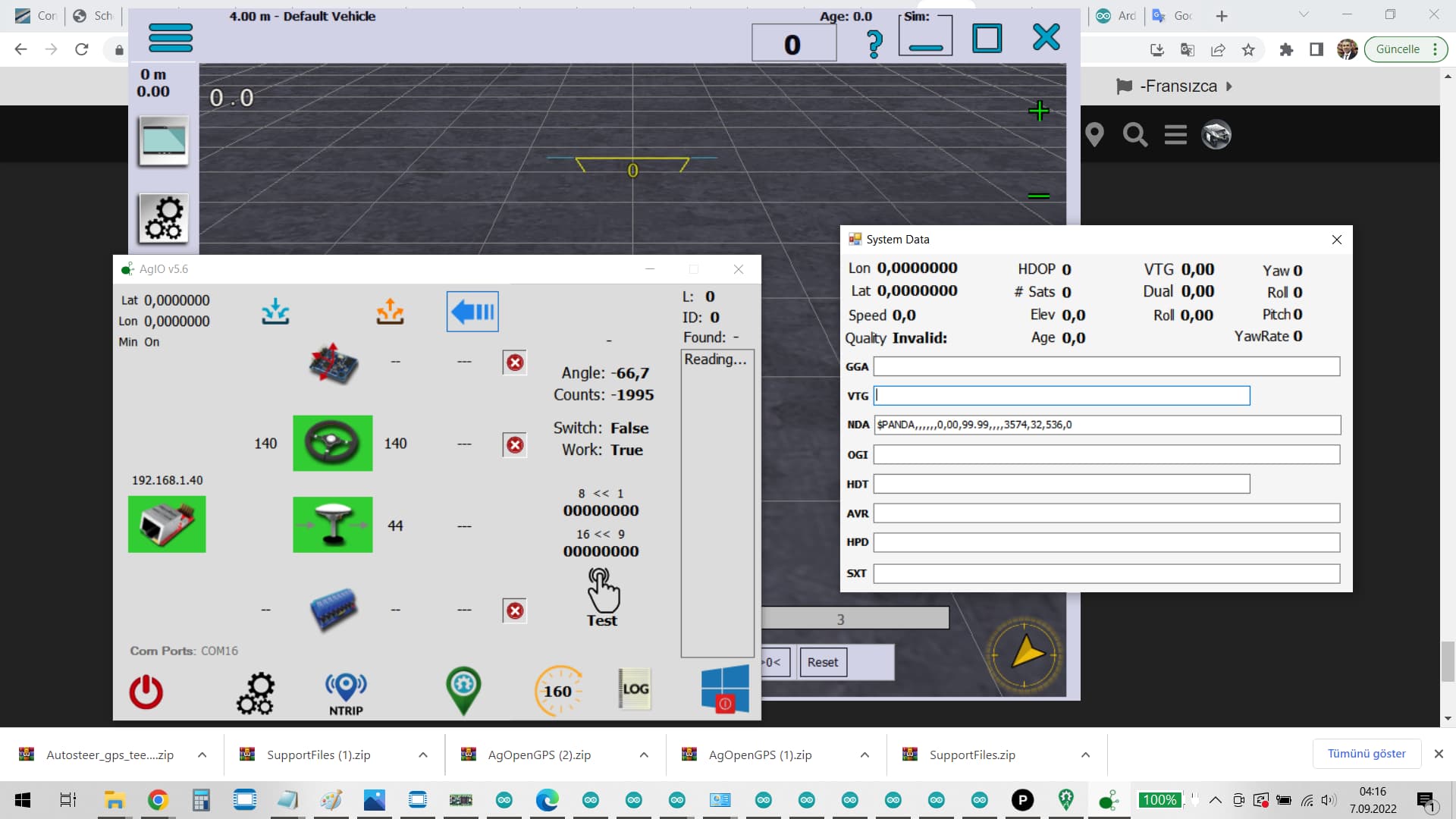
click the incoming data button on AgIO. the blue arrows button. Lets see that screen.
You need to have a GPS signal, connect the F9p to the teensy. everything will work, you will never see the BNO work without GPS.
2 Likes
in this way.
byte Eth_myip[4] = { 192, 168, 1, 120 };
IPAddress ipDestination(192, 168, 1, 255);
this weekend I’m going to finish my config for the single PANDA f9p+bno 1.13
1.13 Panda Single+BNO v1.txt (20,9 KB)
2 Likes
Thanks to all of you, I will try again tomorrow by getting a gps signal in the open area, since the BNO box did not turn green, I always looked for the problem as software.
Juan is correct. You need the F9P connected. If you look at the serial output from the teensy it will keep saying swapping gps channels or something like that. It can’t find the GPS so it is not sending out a panda string. I am surprises it says anything in the NDA field.
1 Like
The IMU box won’t be green as it is not a separate UDP connection. The BNO data is transmitted in the GPS paNDA string.
1 Like
Even in my room, when I connected an antenna, BNO data came ![]() When I play BNO, the data does not change, I guess because there is no RTK, thanks again to both of you. Well Juan last question: I uploaded the file you sent to the rover, would it be ok if I upload Tony’s file to some base?
When I play BNO, the data does not change, I guess because there is no RTK, thanks again to both of you. Well Juan last question: I uploaded the file you sent to the rover, would it be ok if I upload Tony’s file to some base?
If you are going to use SingleF9P+BNO, my file is fine, (not ready yet).
I don’t know what files Tony uploaded, but I think they are to use DUAL, that is if you use 2 F9P and you don’t have BNO.
For a base, there are settings in ardusimple.
1 Like
it is true that I will use only f9p and BNO, what I meant was that I have 2 f9p, baz and rover, the file you sent is 1, I will upload different files to both f9p cards, right?
I have dual GPS. Shouldn’t I have this IMU data in the top left corner?
No, with Dualheading there’s no Data shown.
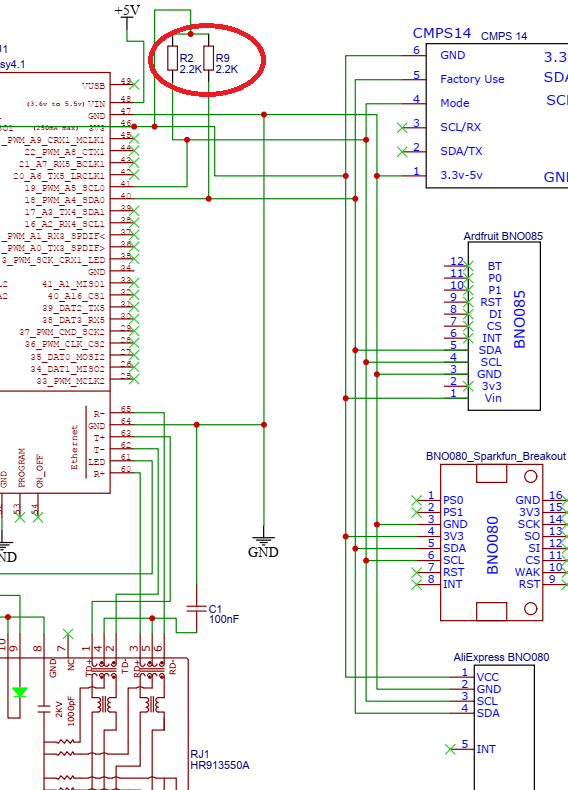
Hi Jhmach, In the Panda schematic, pull-up resistors are added to BNO, when I look at your board, there are pull-up resistors only in ADS, is there a need to add pull-up resistors for BNO? By the way, I don’t know who prepared the Panda schematic, but the 5 volt and GND connections of the CMPS are reversed.
In the upper left corner of the screen, there should not be any information with a double GPS at all? Where could I have made a mistake. The firmware was uploaded with panda2. In the program, AOG chose a double antenna. Maybe some other settings need to be done.