Thanks for the answer. My filter was on. And reverse detection is enabled. I’ll try in the evening.
You should not need RTK for the BNO to work. Just GPS signal to make the panda string complete so it can be parsed.
You should not need the external pull up resistors. There are pull up resistors on the BNO board.
2 Likes
Reverse detection is okay if on. Just make sure you have dual selected and dual as imu not selected.
This is right? And also indicate the height of the antennas and the distance to the rear axle as in a single GPS?
Yes, set it up in the just like you do for single. The antenna offset left to right is a negative number. because you are using the right antenna and offsetting right. just measere the distance between you antennas and use half that value in a negative to get vehicle center. So 120cm is -60
1 Like
Thanks, I’ll do that.
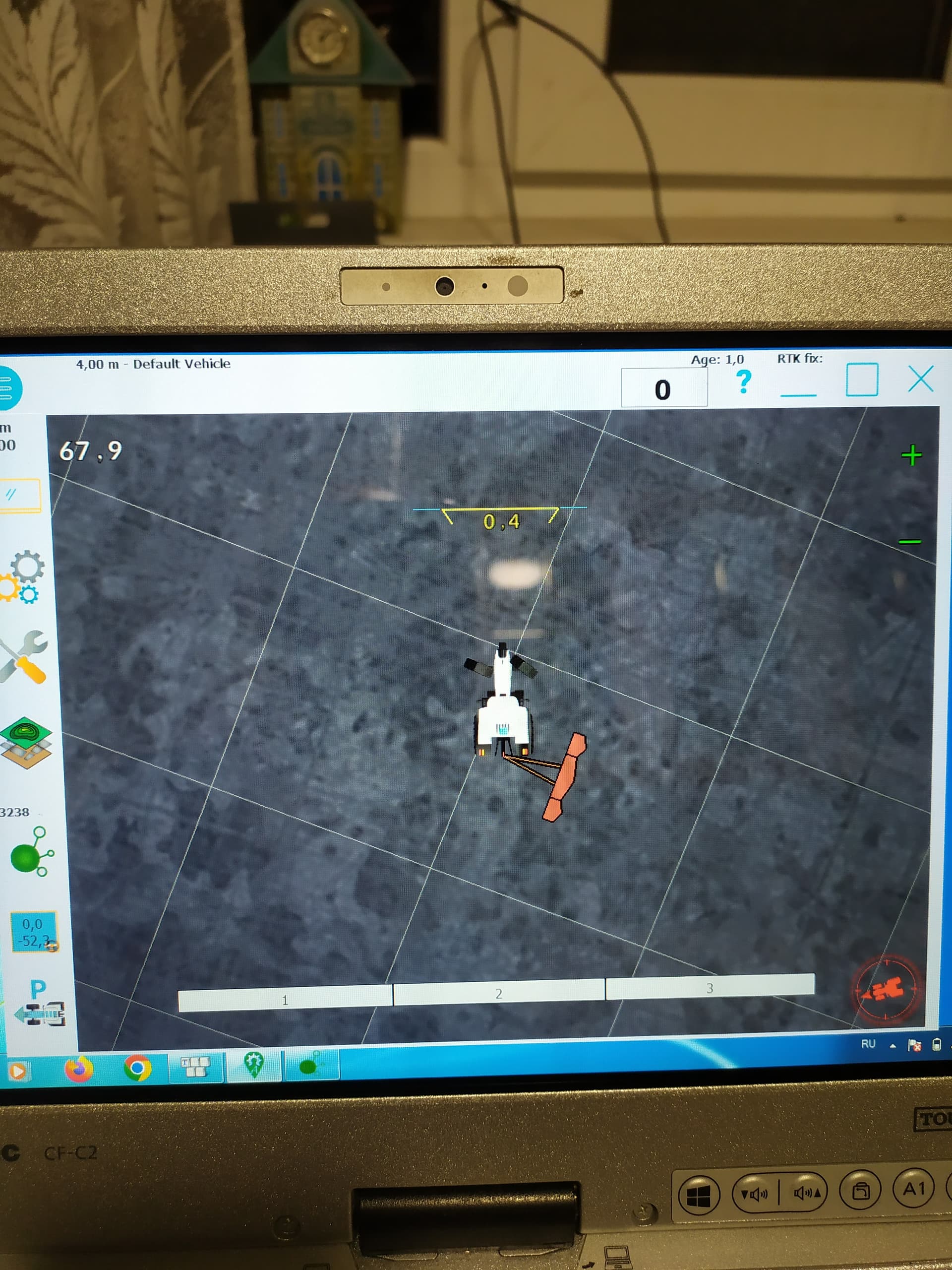
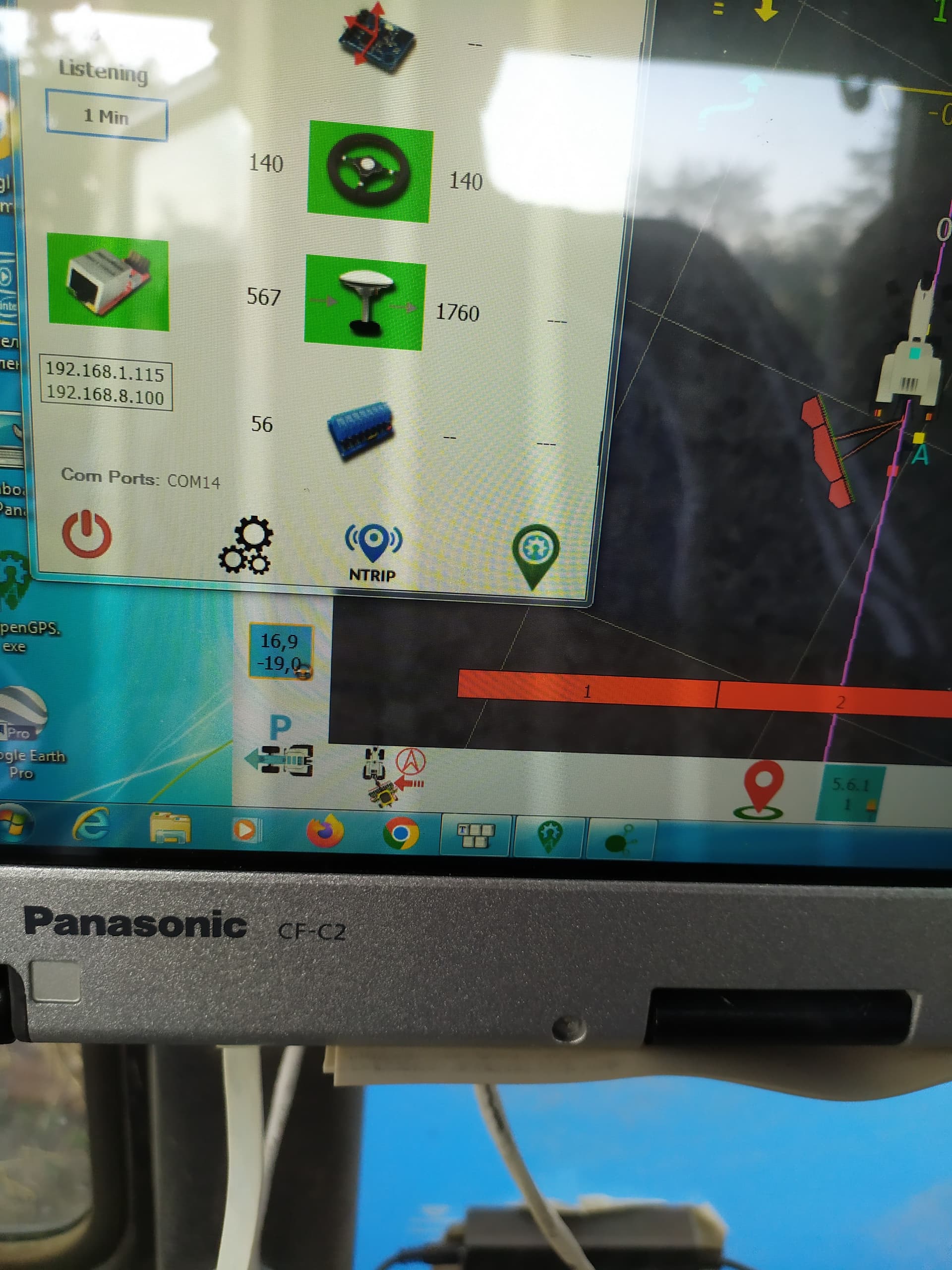
Failed to start the job. Everything is active, there is an RTK, the steer is also green. When I turn on the autopilot button, the arrow is also green. I created the field, I made the line A and B, but the motor does not work. When I turn on the settings, turn the wheels to the right or to the left and turn on the autopilot button, the wheels return straight, as they should. In the simulator, I connected the motor and the WAS sensor. Started the movement. From the rotation of the sensor in one direction and the other, the direction of rotation of the engine changed. Where could be the reason?
If it works with these buttons, it should also work on the AB Line.
But for the record, did you drive your vehicle?
Yes, I was on the move.

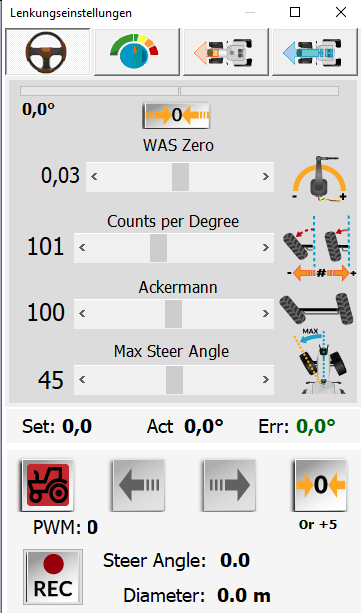
And did you activate this button in the lower right corner?
yes, activated.
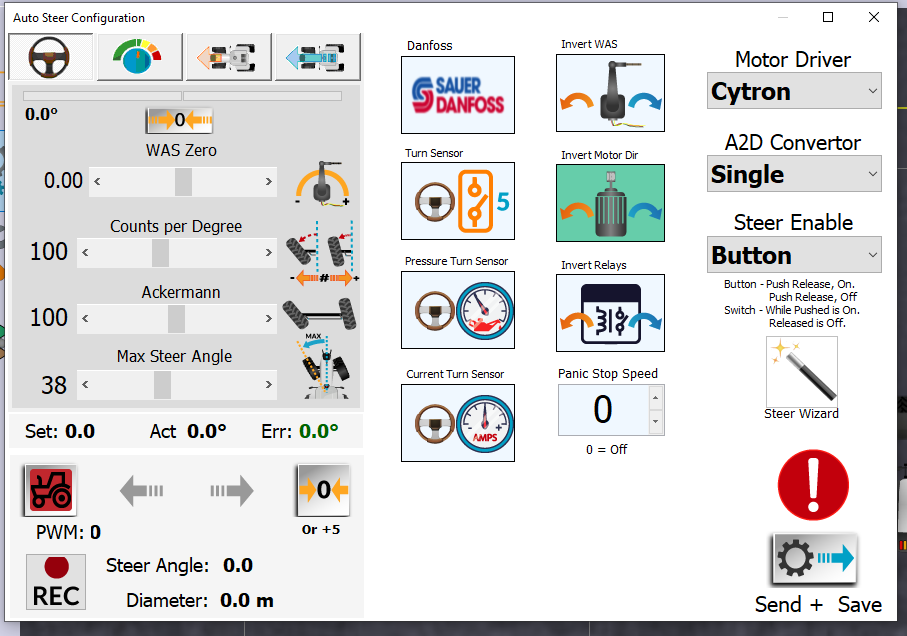
You need to activate the test steer button and then left and right arrow make sure the wheels are turning the same direction as the arrow you touch. In the picture above it looks like the wheels are turning left and the wheel angle is negative, so that’s correct. If the wheels turn the opposite direction when you hit the arrow engage the “Invert Motor Dir” and make sure you Send + Save at the bottom.
1 Like
The button is activated. I turned on the arrow to the left, the wheels turn with each press by 1 degree with a minus sign, also to the left. Right vice versa. I created the field again, made the A and B points. The button on the autopilot is activated, green, but the engine does not respond to movement. I reinstalled the program, nothing has changed. In the evening I’ll try to flash another teensy.
Are you doing these experiments in the field? As far as I understand, manual engine movement works with arrows to the right and left, but when you take it to autopilot in the field, the steering engine does not turn? Can’t take a video?
The section is 60 meters long. Yes, I forgot to say, the speed shows zero. Yes, I’m on autopilot, the engine is not running. I have a working autopilot, same board with IMU only, works great. And with a dual antenna, I can not start it in any way. The video can’t be uploaded. In what format can it be downloaded. Now I’ll try to take it off.
Do you read the messages between 80-85, there are articles about VTG, also someone tried the antenna selection as a fix instead of dual in the settings.
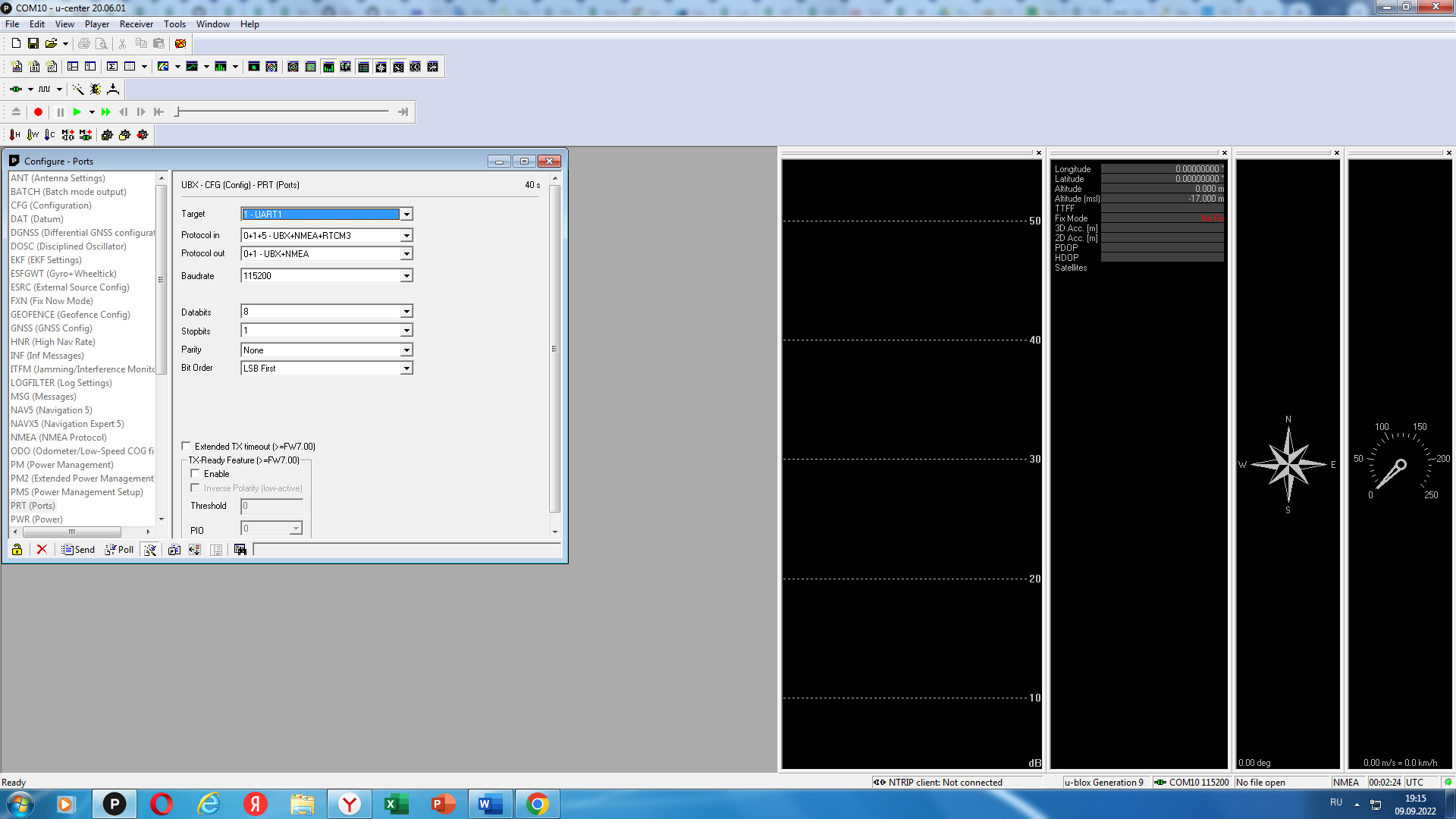
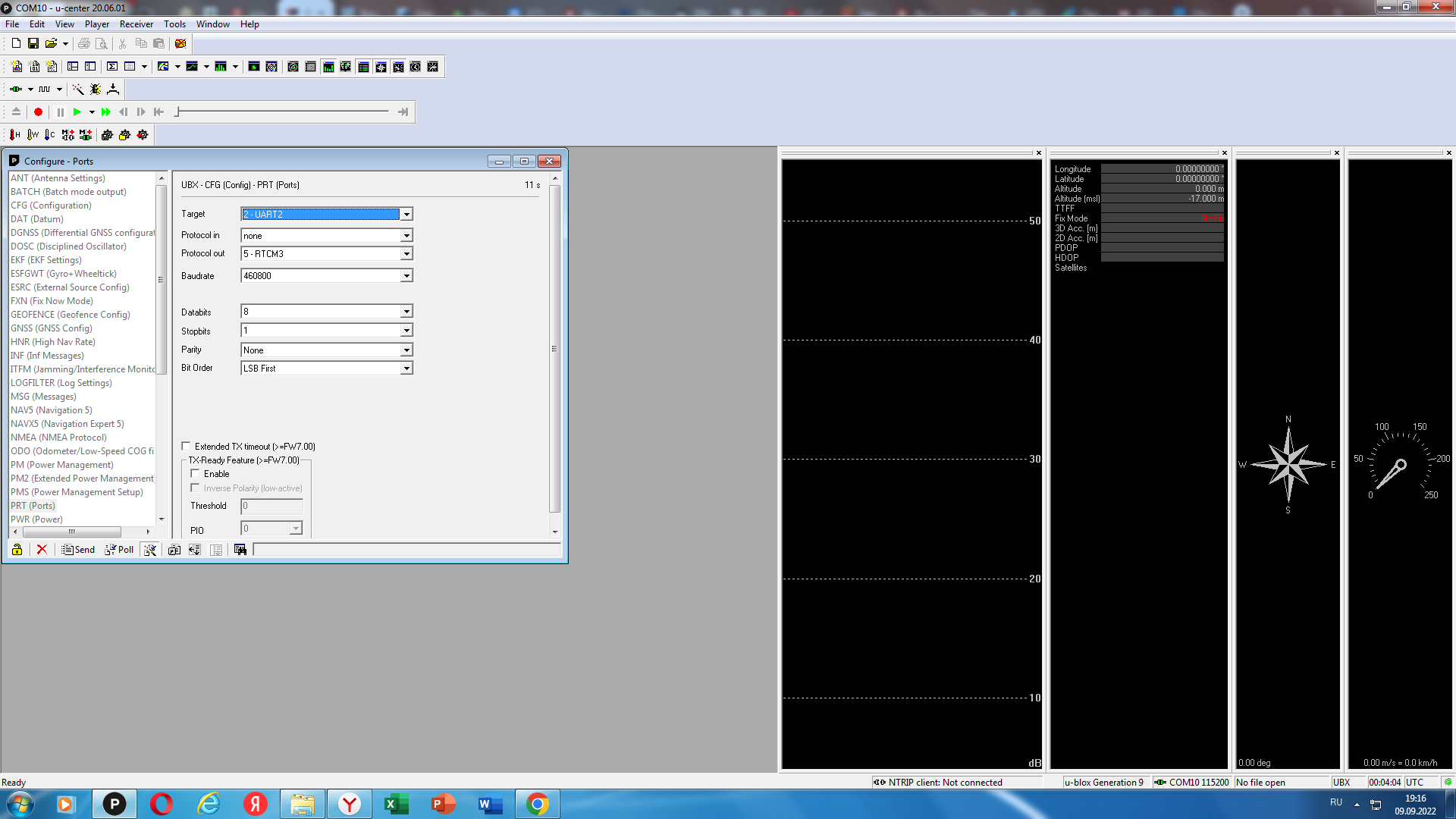
F9P left.txt (20.9 KB)
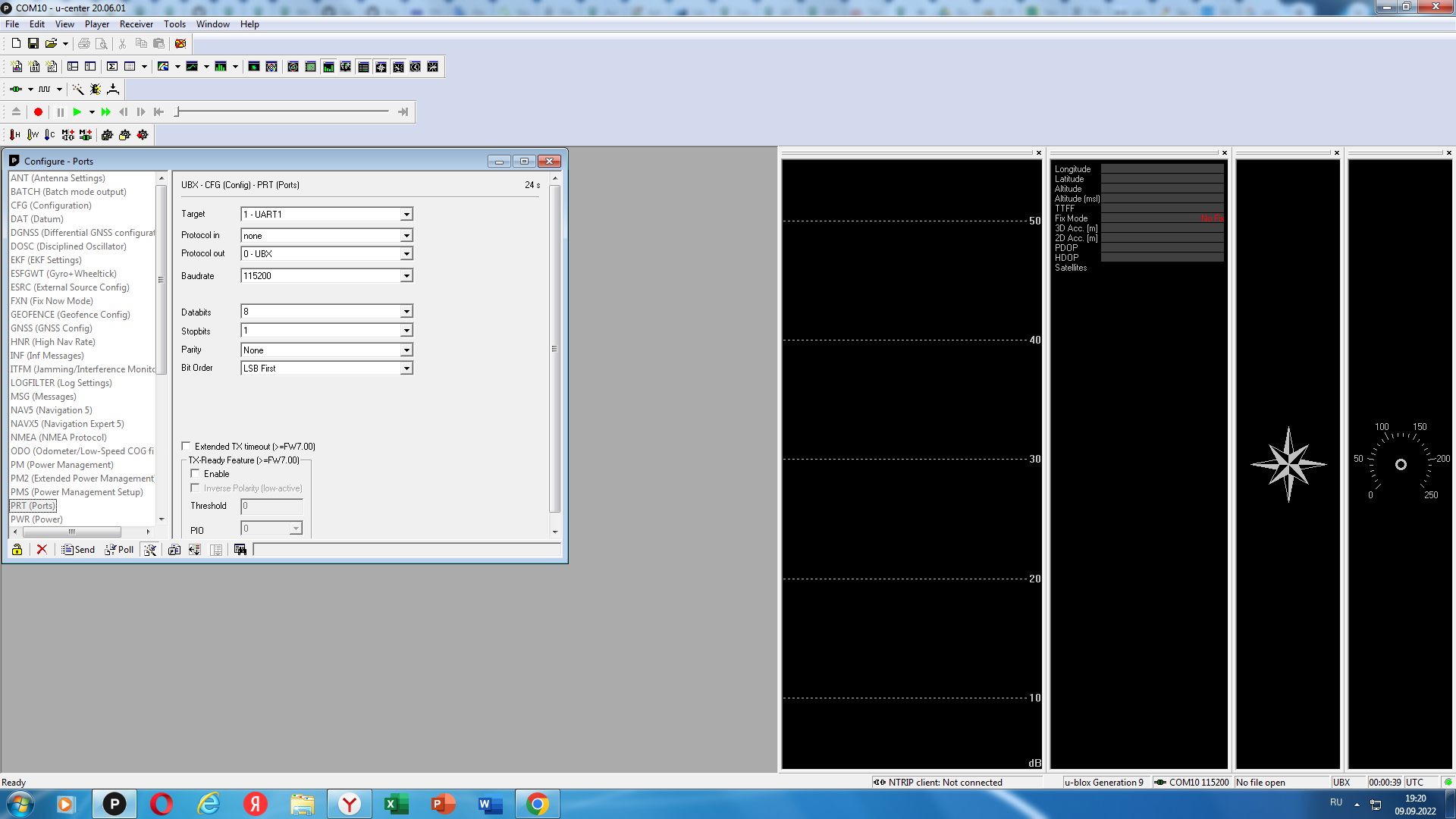
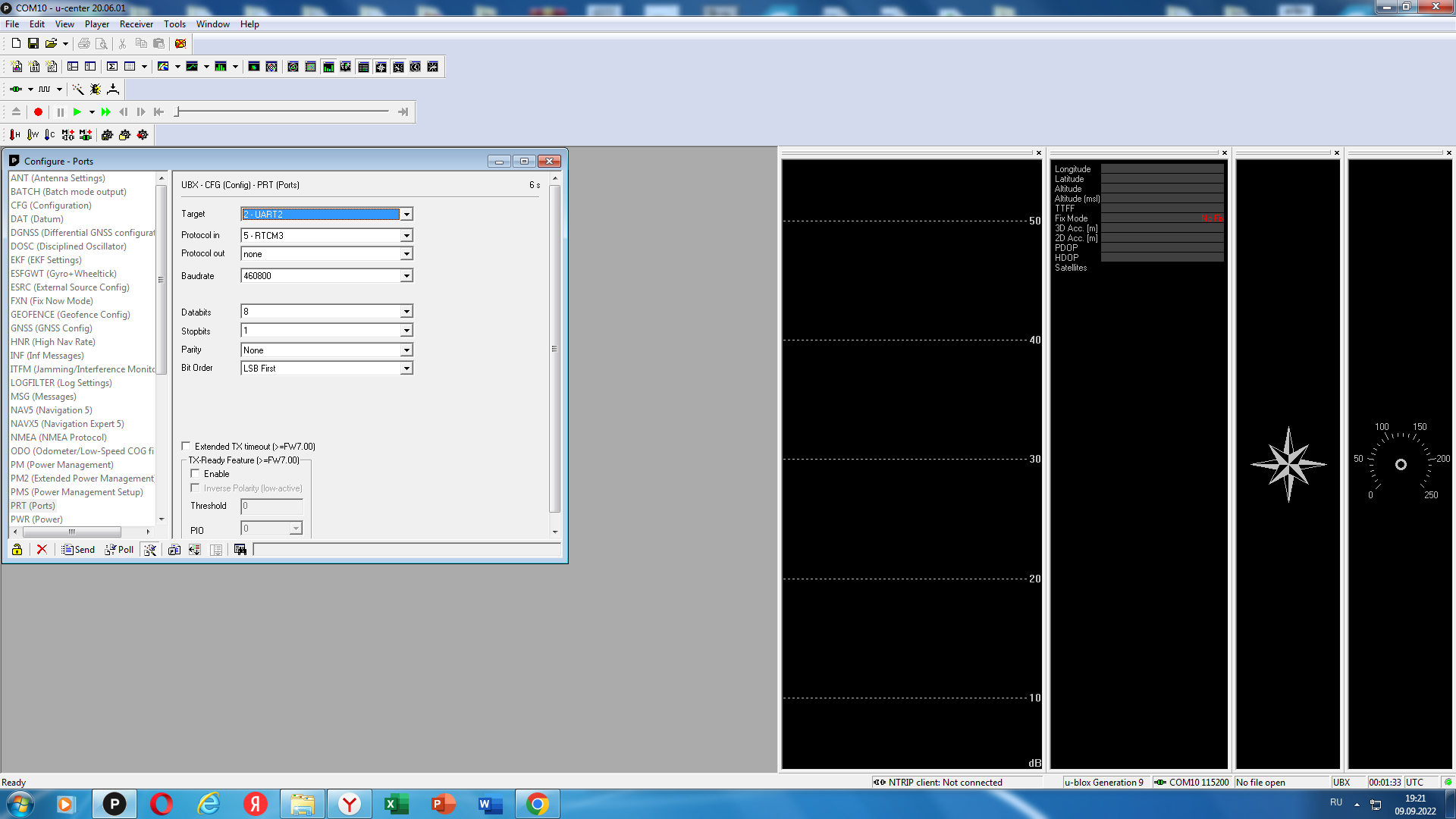
F9P right.txt (20.9 KB)
And where to watch messages between 80-85?
1 Like
The configuration files are from here.