Hello,
I wanted to share here my project of transferable hardware.
Usually, there is one autosteer equipment per machine, each time you want to use autosteer on a new machine, or a machine that you use “rarely” like a combine for example, you need to make a complete new installation.
Of course you can tranfert to it from another already existing installation but there is some work to achieve it, inducing you won’t remove the hardware and will prefer install a new one to save time, this lead to one equipment per machine (usual logic) inducing cost for each machine…
I wanted to change this and make a versatile equipment that you can quickly install/remove to any machine, so it won’t be one equipment per machine but one equipment per driver.
To achieve it, some elements appeared:
- Cables take some time to install/remove, wireless is easier and save installation time.
- Separe totally positionning and autosteer allow to use positionning with any other device, including à simple computer without autosteer if you want to set your plot limit with the 4x4 of the farm, it make the system more versatile.
- Support of positionning and autosteer unit’s must be as simple as possible, fast to install/remove and convenient to use.
For those reason I designed first the TPU (transferable postionning unit), as a most compact as possible unit that should ensure signal reception (antenna), signal treatment (GNSS receiver), heading/roll correction (IMU) and their wireless transmission.
- The antenna can be any correct antenna, I choosed beitian BT-160
- Choosed receiver was C099-F9P because it directly have on board bluetooth/wifi capabilities, have 12v power supply
- As IMU, CMPS14 gave me heading jump’s due to the use of magnetometers, BNO085 gave better results, a wemos D1R32 board was chosen for it’s bluetooth capabilities and the integrated 12v regulator.
However a step-dowm regulator was added prior to the receiver and IMU board because battery voltage can be 14.5V when engine is running!
The TPU take 1m30s to install/remove!
Only one cable (battery power).
Link to the full description and 3D files: https://www.thingiverse.com/thing:5182231


And of course, we also need a transferable autosteer unit (TASU)!
Usually there is the tablet computer and the pcb box but we want it fast to install remove so I decided to make of it only one stuff.
I choosed the Panasonic CF-H2 rugged tablet as basis because it’s cheap, the screen isn’t too big and it look really solid. Anymore the rubber handle, once removed offer super support!
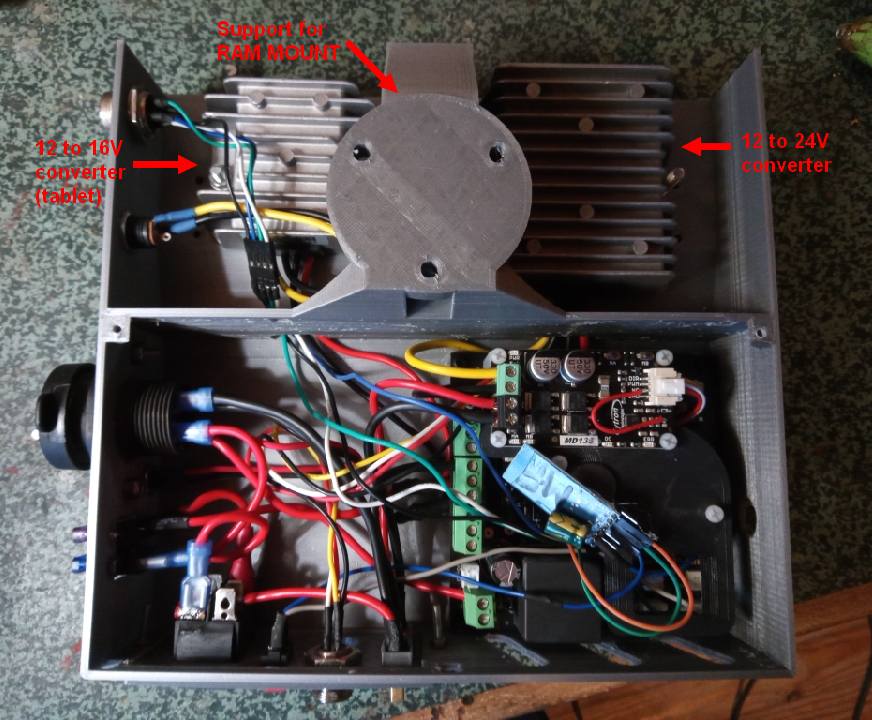
So the TASU is made from a tablet and PCB/voltage regalator’s box that also have the role of support for the entire system. As interface between TASU and tractor I used a RAM support which is few expensive but really convenient to use. Honestly it came with the isobus screen of the tractor that we don’t use because we don’t have the corresponding tool (it was +1€ when we bought the tractor).
The support-box include place for a kaupoi PCB and cytron motor driver, control pannel with connector’s and switch, place for 2 step up voltage regulator, 12-24V for steering motor, 12-16V for the tablet power supply.
The side include auxiliary power ports, one 3 pin that replace the one took to supply the TASU that allow to use, for exemple, the computer of your fertilizer spreader or sprayer or any other, a round DC 12v connector for example if you want to supply a 4G modem to get internet and a 16v plug to supply the tablet.
Just take your TASU, srew the RAM support on the dedicated suport tube in the tractor and plug the 3 cables:
- 12V battery
- steering motor
- wheel angle sensor
It’s ready to use in a couple of minutes!
Link to the full description and 3D files: https://www.thingiverse.com/thing:5376265



As you guess, all this don’t make the system totally transferable because the WAS and steering motor must stay on each machine, however, the main part of the hardware is simply and quickly TRANFERABLE!
Next step is to make a panda wireless positionning unit (if it’s possible, I didn’t seriously tought about it yet).
I hope my design can be useful for some other people or even can gave idea’s for some other designer.
Hooo… I nearly forgot… Thanks Brian!



