I don’t geht any data from my Adafruit BNO08x.
which Teensy and F9p Config should i use i think i’m having a Config problem, first i get data from the BNO08x and not from the F9P now i get only data from the F9P
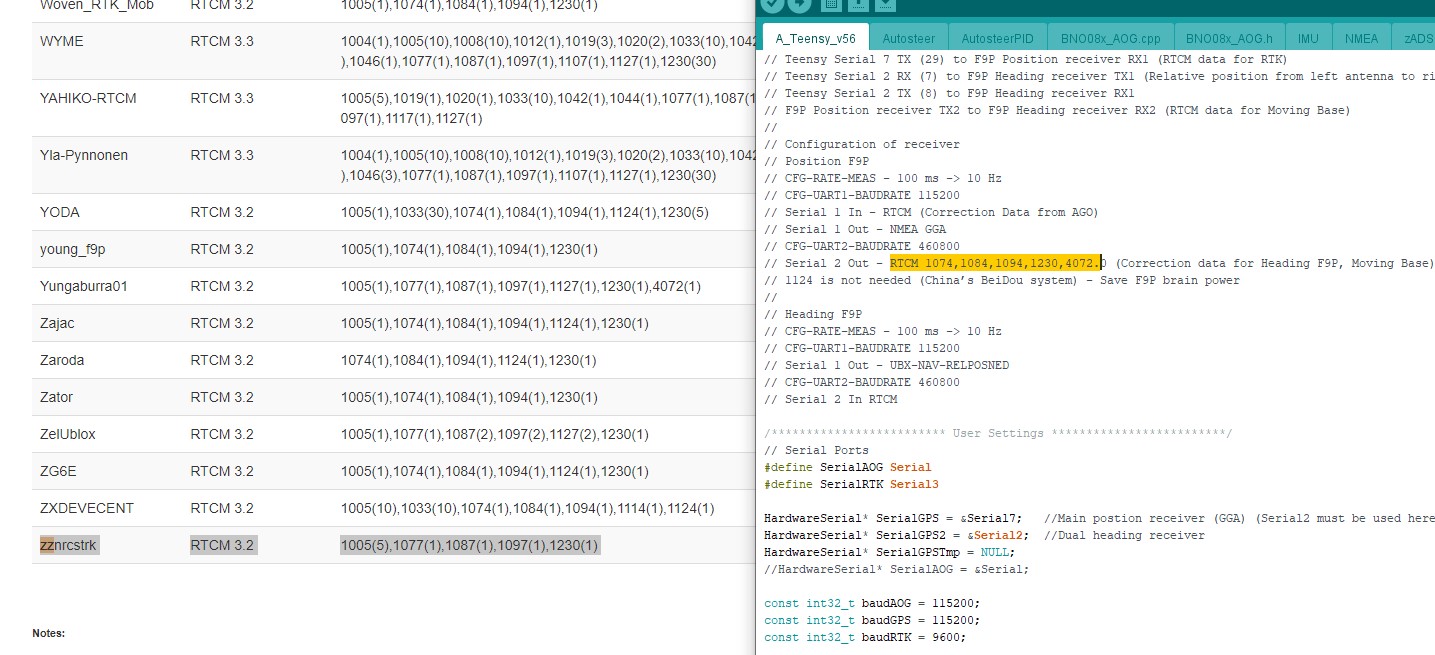
which baudrate, Firmware Version and Config the F9P must have?
Hello, i have a question, is it possible to teeensy filters gps messages?
I cant get fix from this station, on other tractor i do not have teensy and i can get fix
Can i put all messeges from station in teensyino to get a fix?
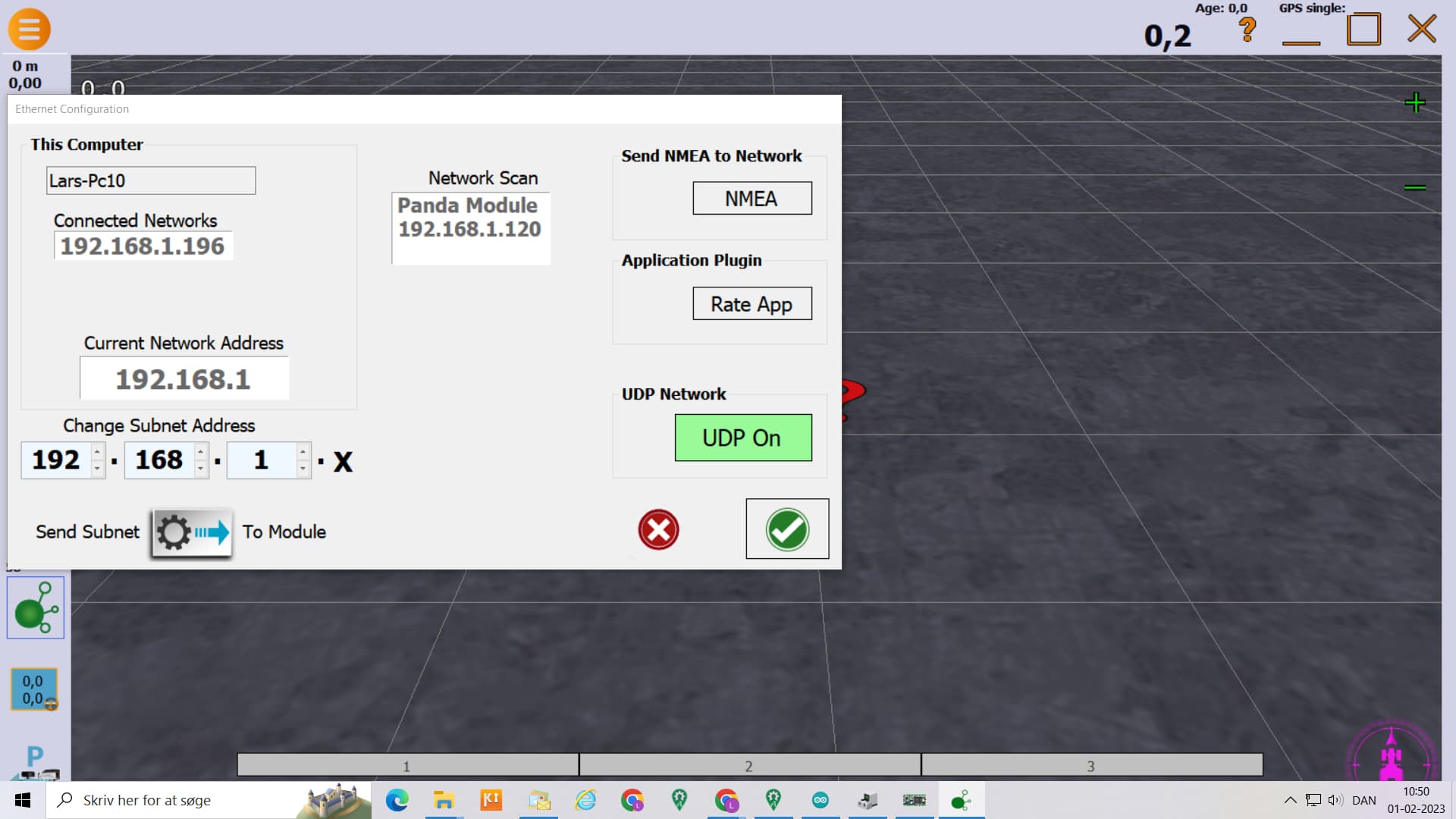
I have a panda alike system. Just uploaded the Autosteer_gps_teensy_v571.ino to teensy.
After that you must remember to click SEND Subnet in AOG
Until that mine looked like you describe!
I set 460800 on uart1 in U-center
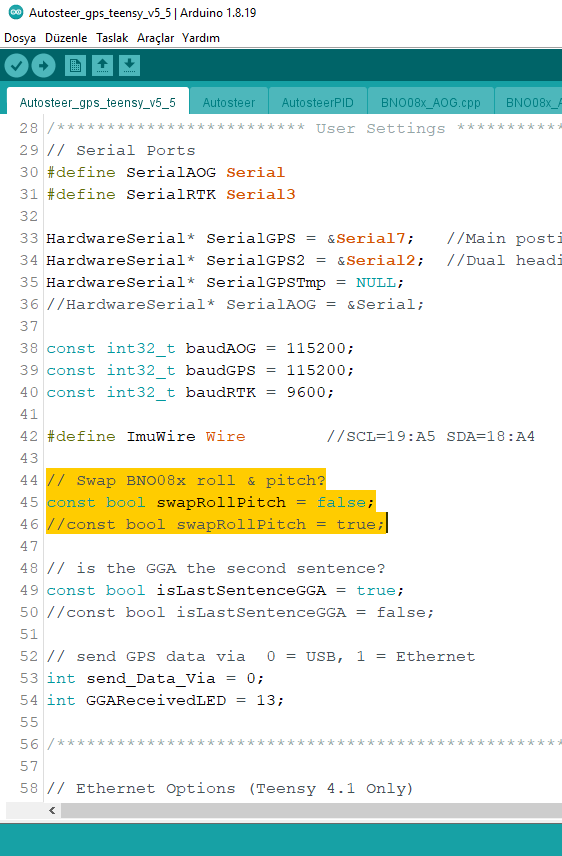
Another way (before uploading to teensy) is to set baudGPS speed instead to 115200 here:
it might get the gpsdata to teensy that way (teensy start blinking orange)
const int32_t baudAOG = 115200;
const int32_t baudGPS = 460800;
const int32_t baudRTK = 9600;
In Ino it say 460800 on uart2, but I believe that is specific for DUAL
I have xbee bluetooth on uart2 so I set that to 9600 on one of my sets(ardusimple RTK2B. The ublox-C099 has its own bluetooth so have 115200 on the uart2
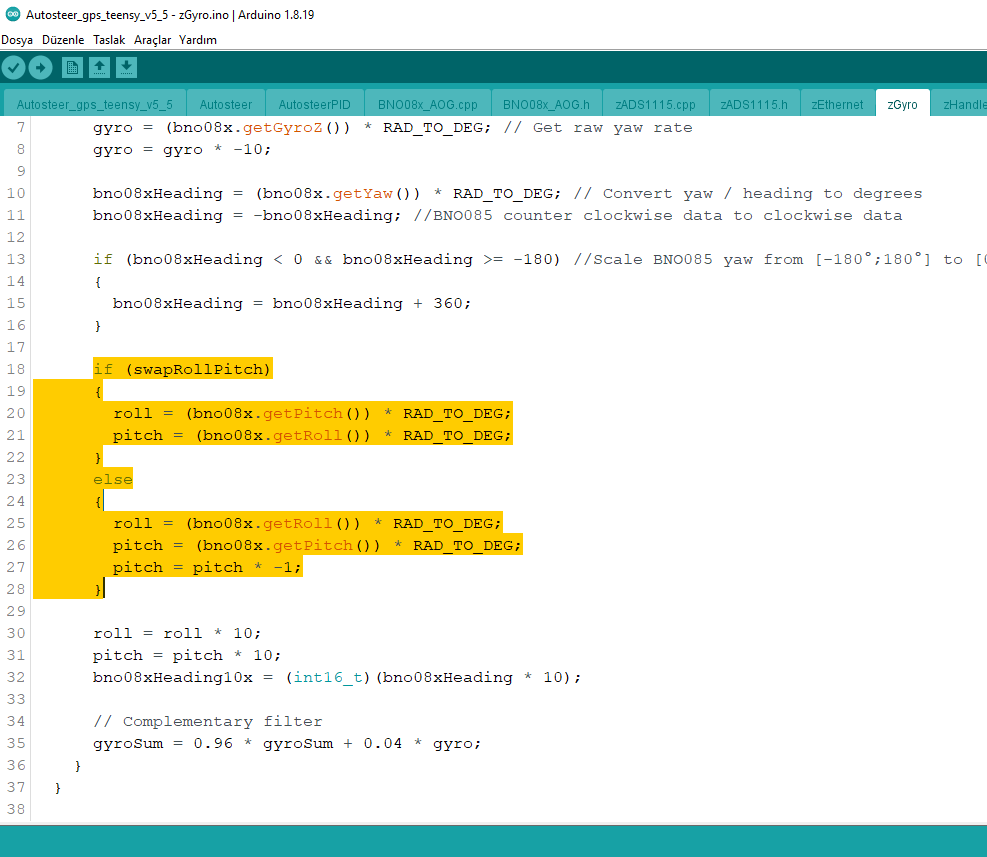
I installed a panda board last week. And was testing it a few days ago. But I noticed on the screen it seemed like the tractor was driving sideways.
The pcb is put on there straight. And we where on a hill. I tried inversing roll. And I Zerod the roll on a flat piece of ground.
Roll filter was set to 0
Roll is active and changes when driving around. However it didn’t seem consistent. I had the feeling it was taking the wrong axis.
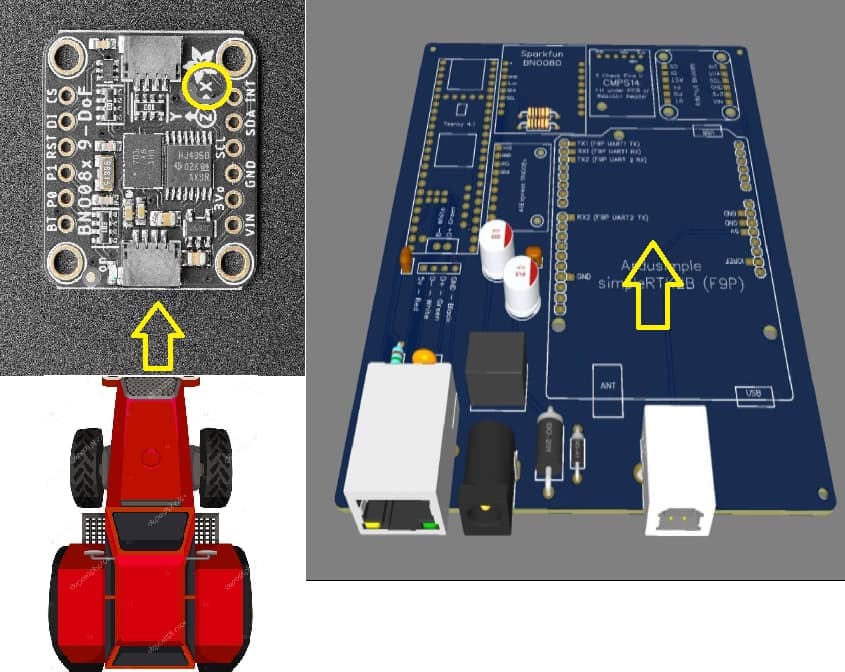
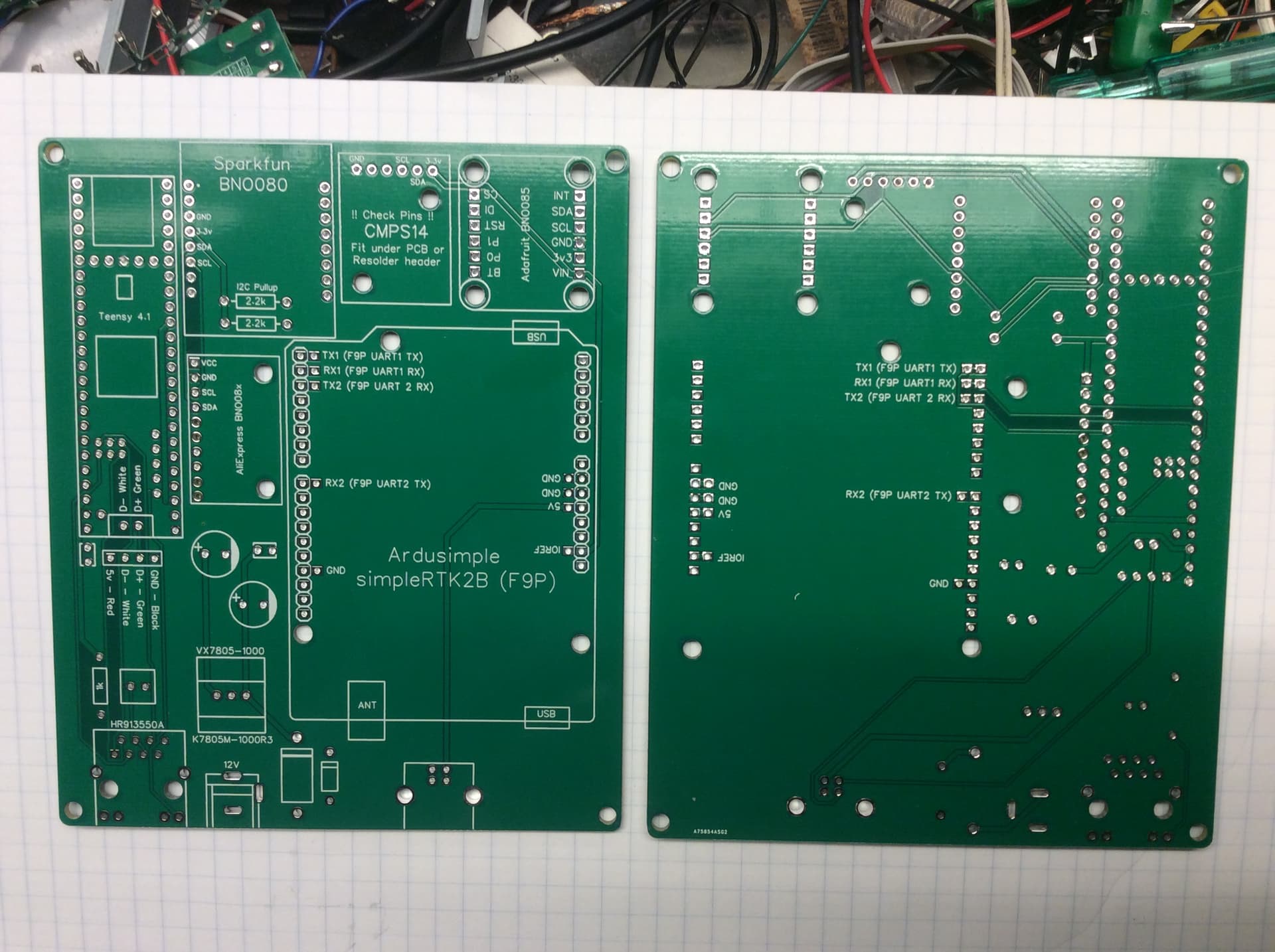
I used the next image to place the box. So I placed it that the cables are comming out at the back of the tractor.