I am maybe getting mixed up with 5.7.3. The u turns very often didn’t calculate at the right place. You will notice it quite quickly if there is a problem.
5.7.2 does crazy things on the boundary section connecting the first and last boundary point. Tries to turn right in front of the tractor after you turn around.
on the headland boundary mode?
yes noticed that on mine 5.7.2
i just manually steer into and out of corners then let it do its thing

Autoyouturn errors. Things like drawing the youturn 8 miles off. you can see the orange dot right below the imu indicator. thats where it would turn around at. this is fixed on 5.7.3.1
I’m running a self made panda board with teensy 4.1, bno085 and simpleRTK2B. For steering I use a PCBv2 with a simple friction wheel drive. AgOpenGPS version is 5.7.2. Yesterday I noticed that sometimes the lanes either overlap or that there is a gap between them. This only happens occasionally on steep side hills and never on flat land. Unfortunately I didn’t take any screenshot…
I’m wondering if its related to some of the IMU settings:
- Roll filter should be 0, correct? (currently running with 30)
- What is a good value for ‘IMU GPS fusion’ for panda?
- I need to invert my IMU roll in the AgOpenGPS settings. Does this interfere with the panda code?
1- 0 or 1
2- 70% IMU should be a good start
3- should work, just look if the compas tilt in the right direction
Could be the WAS not at 0 / machine/tractor pulling sideways.
wouldn’t this explain the gap if imu was inverted?
Yes that’s the question. What pgn should be sent to teensy when roll is inverted? Not obvious to see in log on ver 5.72.
Or is that info sent to teensy, only if/when you change vehicle?
Here a picture of the gaps (cables are a mess…):

My antenna is positioned on the right side of engine cover (about 40 cm). Maybe this is rather the cause of my gap/overlap issue. I’ll do some further tests with the antenna back in center and flipped IMU (if needed).
quote=“Jobs, post:540, topic:8834”]
My antenna is positioned on the right side of engine cover (about 40 cm).
[/quote]
Then you must have an antenna offset.
Do you have your antenna offset correct?
Or possibly the machine offset.
Ive remember one else with this exact same problem and am pretty sure it was WAS related, possibly not zero’d correctly so worth checking that after you’ve checked your measurements for both tractor and machine
1 Like
with experiance i put always the antenna on the midle
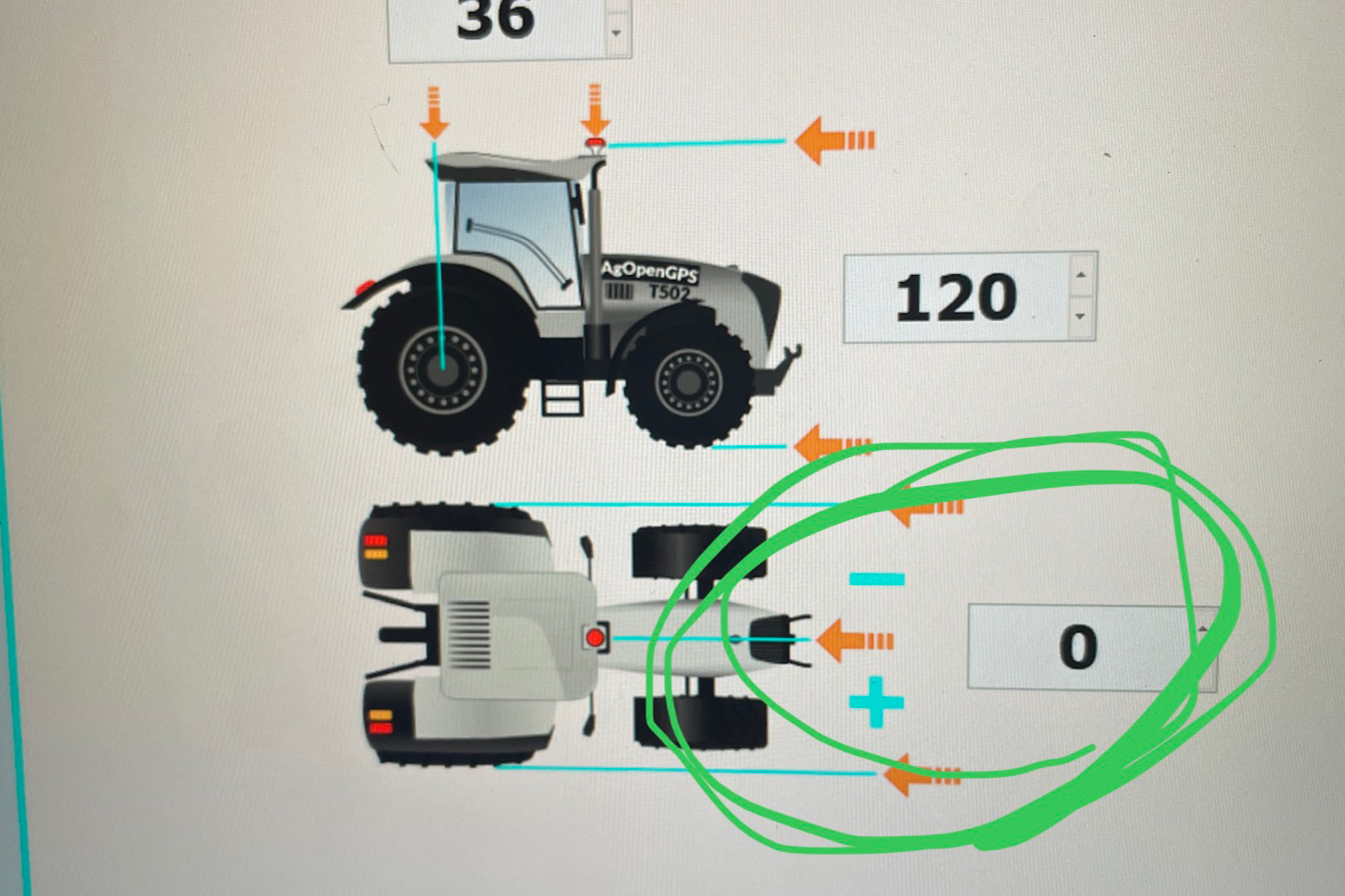
but some friend put it on one sight and with discussion with them they apply negative value as this drawing …
but the reference is the tractor or the antenna according this it is not more clear
as for me the tractor is reference but in reality look like the antena as reference ?
@Vili & @BrianTee_Admin what is true ?
These are the centimeters that the antenna is displaced from tractor center. Keep in mind that if you want to adjust the overlap or space between lines, this measurement will be half of that measured on the ground. The best option to measure is an iron that touches the ground on the tractor hitch, and goes back and forth along the same line.
1 Like
Hello,
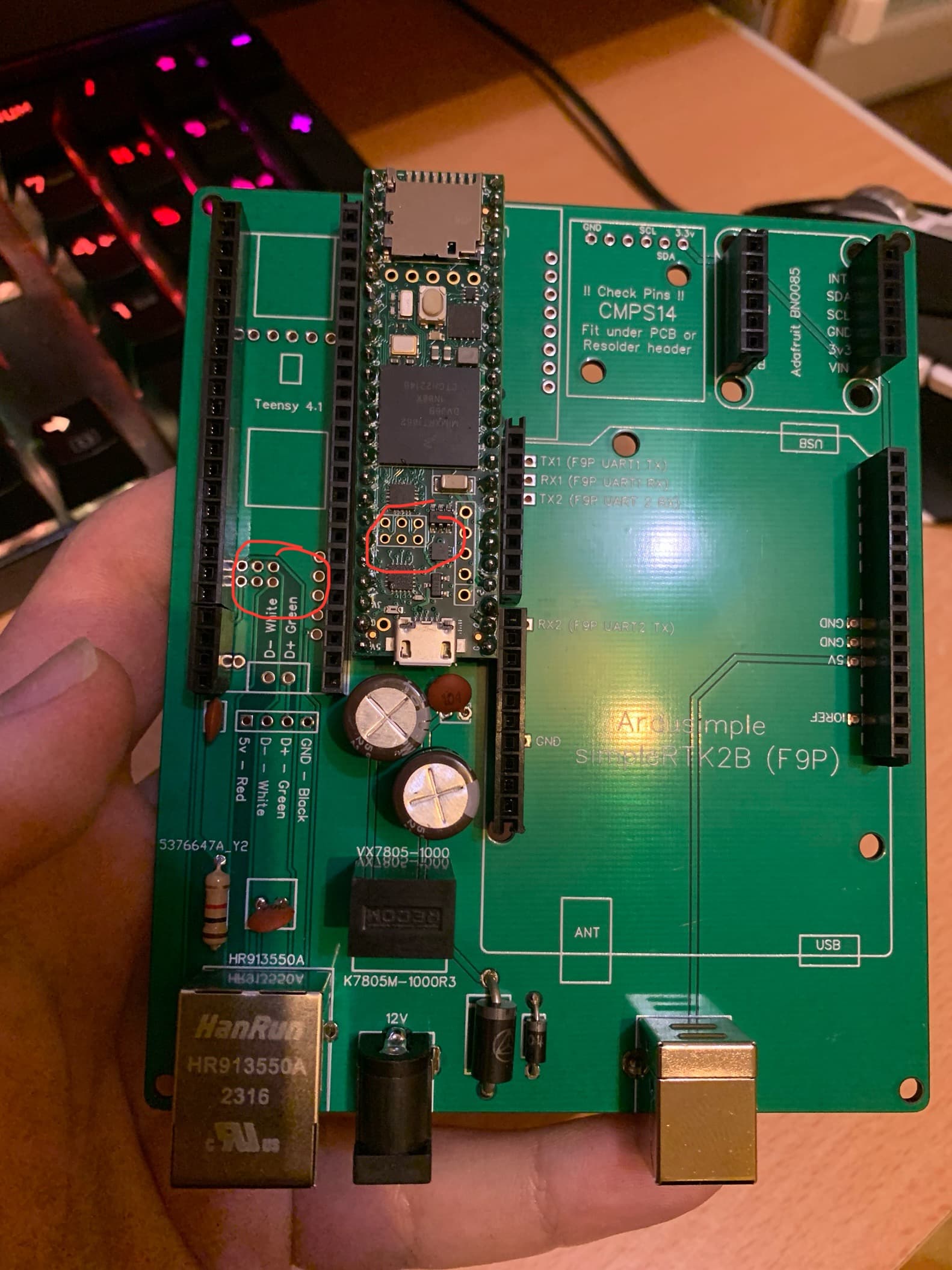
Can someone explain to me how to connect the ethernet pins on the tennsy 4.1 to the panda board. Because I cannot find narrow enough pins to solder.
1 Like
You can use leftover parts from resistors and diodes. Soldering is both economical and guaranteed.
1 Like
Hay I am new hear working on this UDP , IMU , teensy setup. Want to use a Emlid to feed GGA ,VTG to the teensy got a copy of the teensy software that works with Ublox as it seems.
Before I make a mess of things and pointers here ? I was thinking I just use a rs232 to UART and feed the teensy at 115 k baud rate but seems teensy want the 640k baud ,
Thanks for any help!