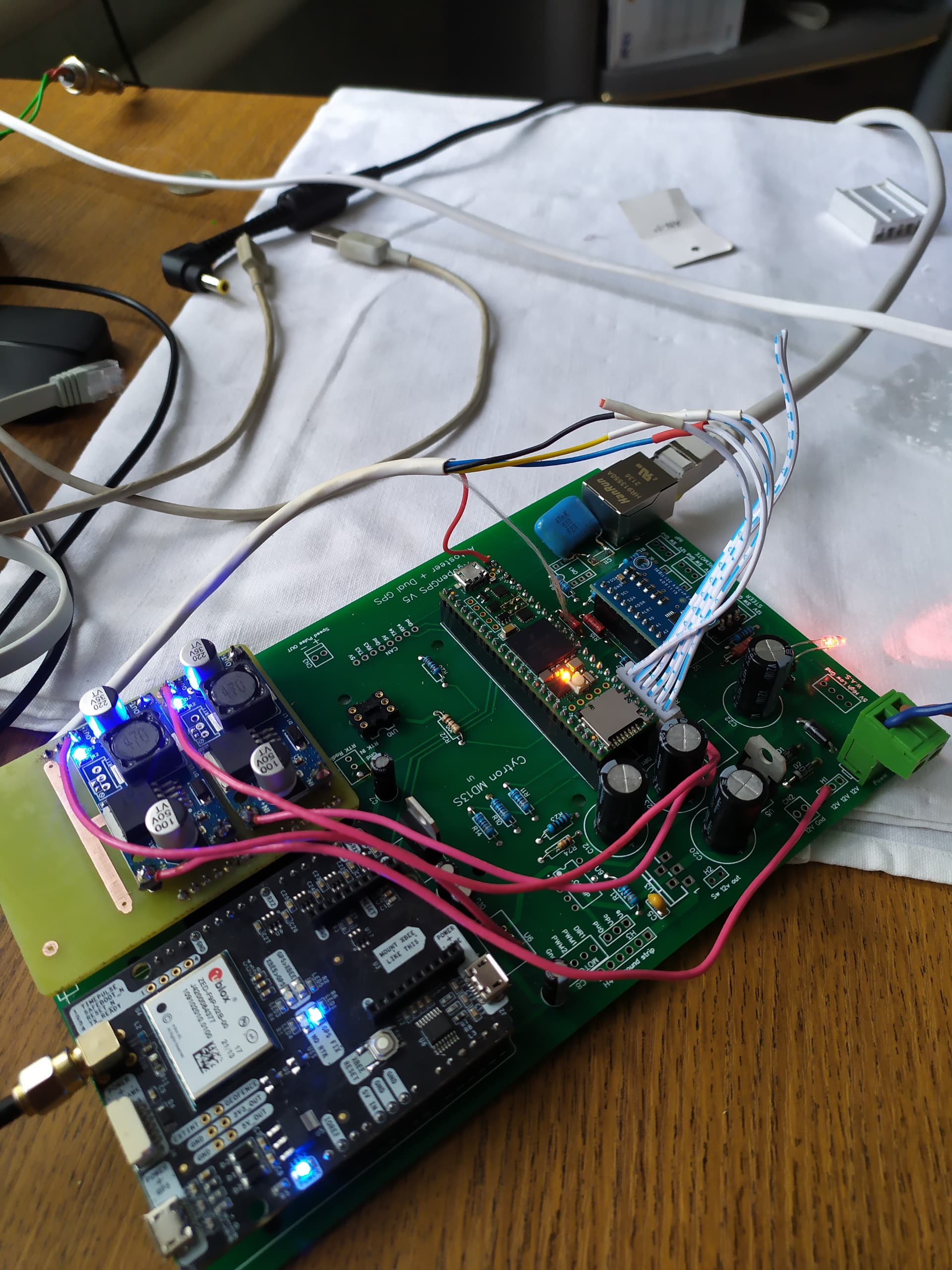
So after bench testing with PANDA, plus a V2 board with BNO085 still attached, very strange results.
The effect seems to be the average of the two.
The PANDA BNO085 and the V2 BNO seem to strangely work together somehow. Moving either affects both heading or roll. The PANDA BNO updates much faster, the V2 BNO seems to react slower. On the bench they do not seem to fight both heading and roll stay stable and locked until moved.
This dual BNO Easter egg has me very excited to see what the random driving result is.
In theory Panda could be mounted with it’s Imu on the roof of a cab with suspension. Then mount the Autosteer PCB directly to the tractors frame, in order to compensate for cab suspension, and then to compensate for sidehill. Might be worth a shot.
Correct me of I’m wrong but if you want to compensate Cab suspension you need to get the corrected Position on top of your transmission, and then this position with the second Imu to get the real under axle position. ?
All things being fixed, two IMU’s should read the same thing regardless of mount point in the tractor. ( unless suspension)
The only thing that separates them in this test will be time. We already have plenty of footage of PANDA driving excellently. So will it mess that up?..… wish the 3d printer was faster.
Hello. Launched panda single gps. On udp it does not work yet. On usb only gps works. How to turn on the autopilot so that it also works on usb. I don’t understand how to do it. version 5.6.11
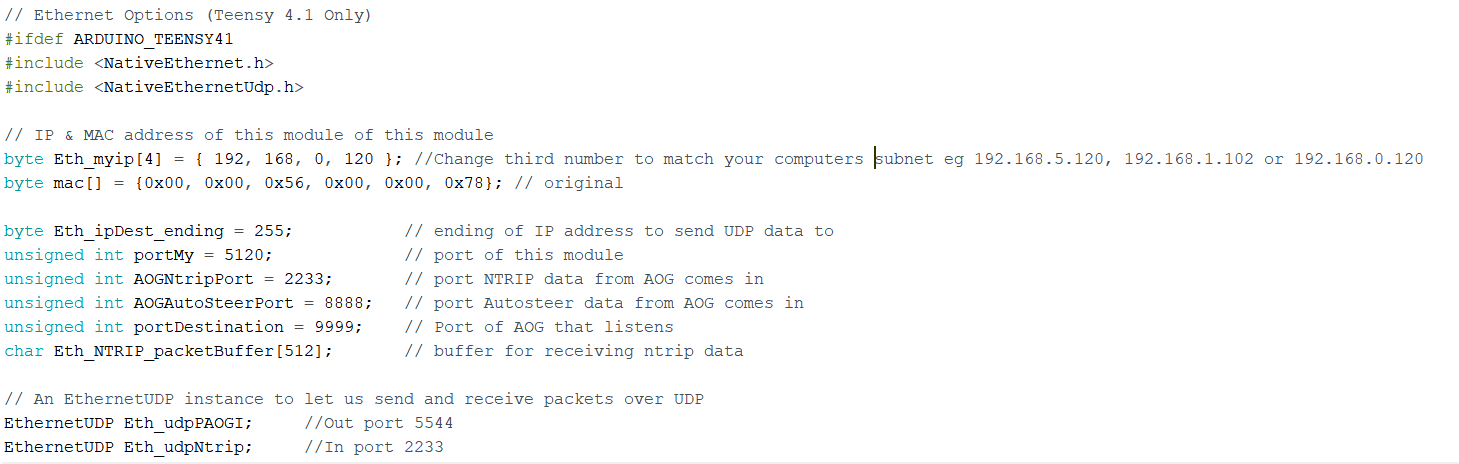
What is your network address for udp, Panda ino is set to 192.168.5.X, so you want your network to match the .5, or change it to the subnet of your network.
I don’t understand how to connect SMPS14 correctly. It’s easier on BNO. And here the conclusions are not clear. The circuit has pull-up resistors on A4 and A5. They are not on the printed circuit board.
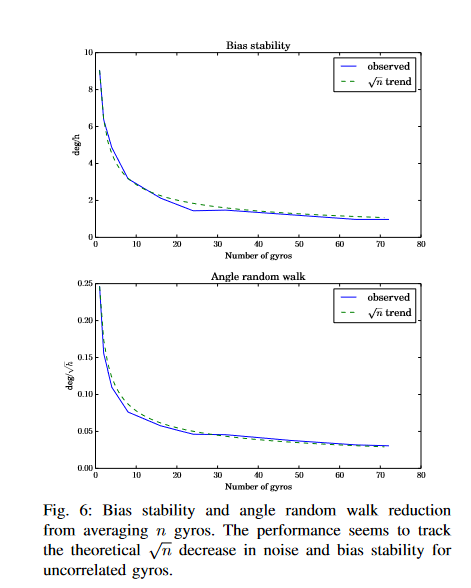
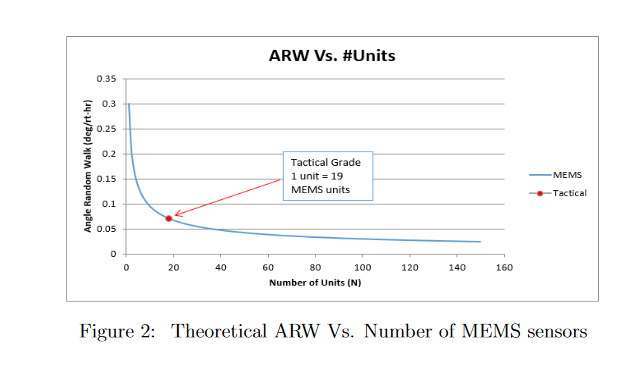
Mems imu arrays are a proven way to increase overall imu performance. Only one BNO fused in PANDA seems more than sufficient for farming in your videos. So it will not take 10-20 mems like in the online papers I have been reading, using much older chips. Two or three BNO should let me get to the nuclear precision you speak of.
This document is old already, but still 72 gyros what a beast.
It may seem like overkill, but many other papers online draw the same conclusion, more imu’s the better. PANDA will make this easy to test. Teensy has wire, wire1, and wire2 for I2C, so will not have to change any BNO addresses.
It is not possible to start SMPS 14. SDA is connected to A4. To A5 SCL. Checked the connection several times. Version 5.6.11. I have connected 2 sensors. I connected these sensors to version 5.5.0, they work. Roll show. I also noticed that if I connect the sensor, the data on the GPS and the autopilot disappear, they light up in red. And the LED on TEENSY stops flashing. Tried to reflash, also does not work. Checked for a short circuit, everything is normal. Voltage is ok too.
Plus how do you know your BNO went wrong? if you cannot compare it to another standard?
With one, the BNO is wrong or right maybe
With two, the one closest to when the last readings agreed in tolerance is right
With three, the average of the ones within tolerance are right, until only two agree.
If you have 72 then you can flat out ignore 30 of them.
But the BNO is quite a bit more sophisticated, with more instruments for error checking already. So two, or three being compared should be absolutely amazing.
Does the teensy +panda, do any calculations on the heading, or does it just pass the Imu heading in the pgn?
The roll doesn´t drift as it is internally stabilized to gravity, according to hillcrest:
"2.2.2 Game Rotation Vector
The game rotation vector is an orientation output that is expressed as a quaternion with no specific reference for heading, while roll and pitch are referenced against gravity. It is produced by fusing the outputs of the accelerometer and the gyroscope (i.e. no magnetometer). The game rotation vector does not use the magnetometer to correct the gyroscopes drift in yaw. "
The papers you refer to concentrate on yaw/heading, but mention the algorithms can be used for pitch and roll as well.