Pretty sure they list at one price, then watch demand. If demand outstrips supply, then they just cancel all of their back orders and hike the price to something ridiculous.
Sharp practice.
Just checked Cytron to see if they have a decent alternative, but no joy.
The adafruit ones are still forecast to be in stock in March, maybe worth planting an order with them, crossing your fingers and waiting.
Yeah I think it really has to do with not wanting to lose their rankings on the retail websites like AliExpress, Bangood, etc if there were to remove their listings entirely. I’ve seen high-priced listings for products that are long obsolete, totally unavailable and out of stock and will never ever be again as they are no longer being made.
My parents lived in Nairobi for a while and said that they learned when they saw something they wanted in the grocery store, even if they didn’t really need it at that moment, to buy a bunch because a few days later it might be gone and never seen again for months if ever. Seems like we’re now experiencing that in the west!
I was wondering if dual would be better for roll compensation because single + imu is not that great on rough land because of the timing of roll and gps is not synchronized. But first tests with PANDA are promising!
What is the main reason to choose dual? (for me low speed below 1km/h is not needed) I read that heading is better, what are the benefits of this?
One of Ceva’s directors is a good friend of mine. I could try to arrange something, but it would probably be a bare chip with no plate to do by yourself.
IMUs are very fast, though, so if you can work out the right timing, it should be more accurate than the dual antenna, and perhaps react quicker, which would work better on little bumps. I’m anxious to see the code that is being worked on. It’s very exciting stuff. It could be that the secret to getting good and accurate roll data is to figure out the latency between the time the GPS observation was made and the time it comes out of the receiver in NMEA. Then if you cache the last couple hundred ms of IMU readings you can reach back in time and grab the corresponding reading.
For me the main benefit of the double antenna is it’s a bit simpler to set up.
It’s possible that a place like Solarbotics in Calgary might be able to get breakout boards made and reflow solder the chips on. I know they sell boards of their own design and must do the surface-mount soldering. I’m sure there might be some places in Europe that could do that too, if there was sufficient interest.
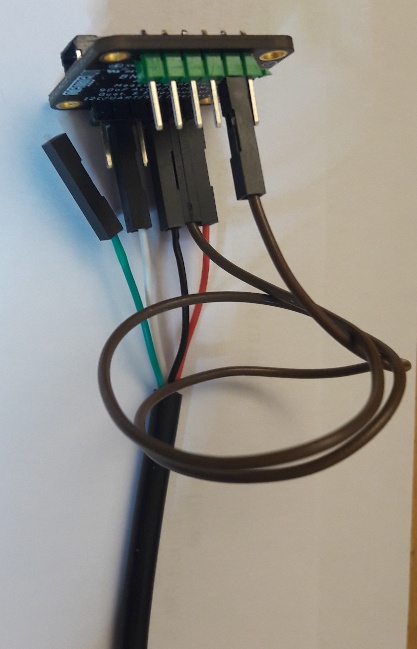
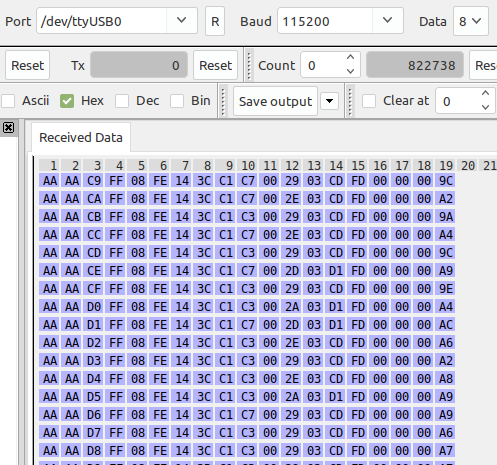
I haven’t done anything further with it, unfortunately. But I think it’s far better to use i2c to communicate with it, rather than continually parsing a high-speed serial stream. I2c is much more flexible, can set the update rate you want, and can poll for information, rather than having it continuously stream. You can use “RVC” mode over I2C, which gives you a quaternion of the yaw, pitch, and roll which can be convered to simple angles. Also you can enable acceleromter messages as well.
I believe I last used the Sparkfun BNO08x library.
In the short term I will be using one of the dual receiver SkyTraq boards for my spring planting. I still hope to explore using the imu and a single receiver if I can ever find time.
Oh good point. Yes for standalone operation with AgIO, RVC mode might be ideal. Would require AOG to know how to parse the packets, of course. I believe I saw the format documented somewhere.
I was looking at the IMU more from the perspective of doing the IMU/GPS fusion on a micocontroller, and passing corrected, fused NMEA position information to AOG or to any other system. That would still be my goal.
I set up a new post for that. Thank you for the great idea about RVC, although that mode has no absolute heading (likely no magnetic heading fusion due to that special usecase)