Do they now have 3rd party steering locked? Haven’t heard of any unlocks for AGCO products, definitely not available on our price list.
@Rolu The new FendtOne is a whole new controller setup, need more time to work out how it’s all working. (They have cut the old way in via the V-Bus ![]() thinking cap needs to come out to figure this out again)
thinking cap needs to come out to figure this out again)
500kbs main CANBUS and Ethernet for all the screens. There is a unlock so the Fendt controller will listen to a 3rd party navigation controller on the ISOBUS (I have not tried this yet, the unlock is there for a rainy day maybe workout how to drive it without unlock too)
@NorthernFarmer can you ask about that part above? Maybe they need to add / update your price list? Only for the latest FendtOne models 200,300,700.
I am having trouble downloading any of the .ino files that you posted in your posts. Any of them that i click on it just reroutes me to a webpage saying “Oops! That page doesn’t exist or is private.”
could you send me the link for them trying to the hooked to my MF canbus.
All my parts are hooked together ready for testing. Can’t wait to try it out.
I have replaced the files that were lost in post 56. (I cant reload them? Something is different now and it dont work like it used to) So now all the files that were there are in a zip folder, just download it, remove the “.txt” unzip and they will be there.
When you want to use with AgOpen just use the Valtra program off my GitHub.
I am downloading the file but it only downloads and says zip on the end no txt to remove and the file its just a txt file. Nothing to unzip.
What am i doing wrong now?

Windows hide known extensions by default. You can change this in the folder options.
It the first setting I change every time a start a new computer.
1 Like
Thanks, got tie files to unzip, but now when I try to Verify and upload to arduino I get an error code
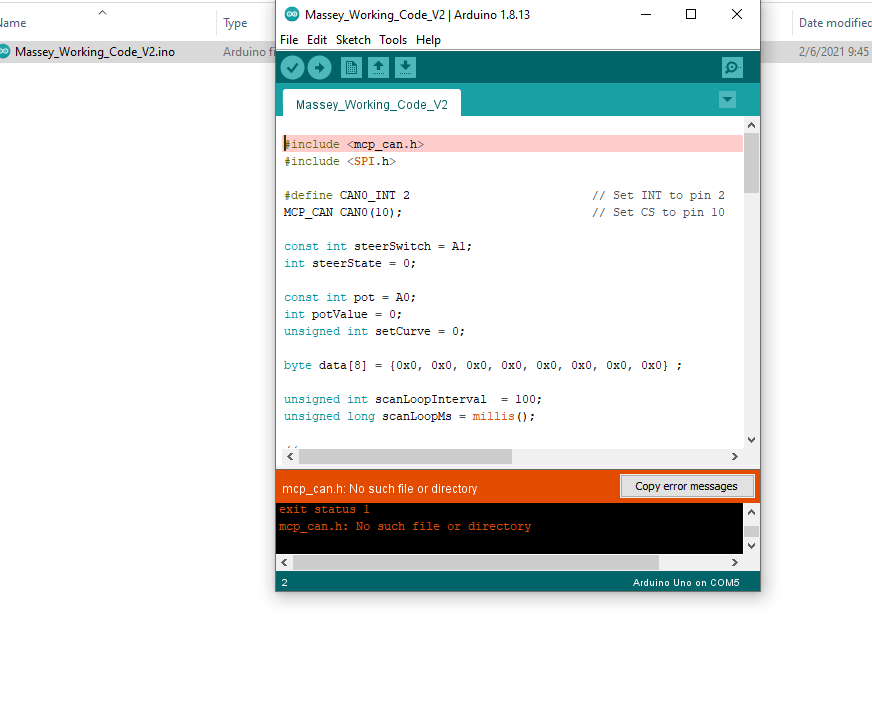
You need the CAN library. It’s not in the Arduino library manager, though. It’s at GitHub - coryjfowler/MCP_CAN_lib: MCP_CAN Library. Needs to be downloaded as a zip file. Then in the Arduino IDE, select sketch->include library->add zip library and choose that downloaded zip file.
I had the same problem. My Mcp2515 was broken. Buy a new one…
From what I remember, I mistook the SPI pin number. Check your boards carefully under which pins what should be and adjust INO.
What CAN shields are you using?
You can try changing the CS pin from 10 to 9 if using the Uno & plug in shield (near the top of the program).
If you have the small board with jumper cables, check the wires and it is maybe 8mhz instead of 16mhz
@stofficl i dont think its my MCP2515 I have to arduino’s uno with the same can shields and i tried uploading the file to both and i am getting the same error.
@baraki I do i go about checking th epin numbers i’m not really sure what needs to be what, just trying cheat my way thru this to get it working. (school all over again)
@CommonRail I am using CAN-BUS shield V@ for Arduino. I tried changing CS from 10 to 9 and uploaded and checked but same error msg comes up.
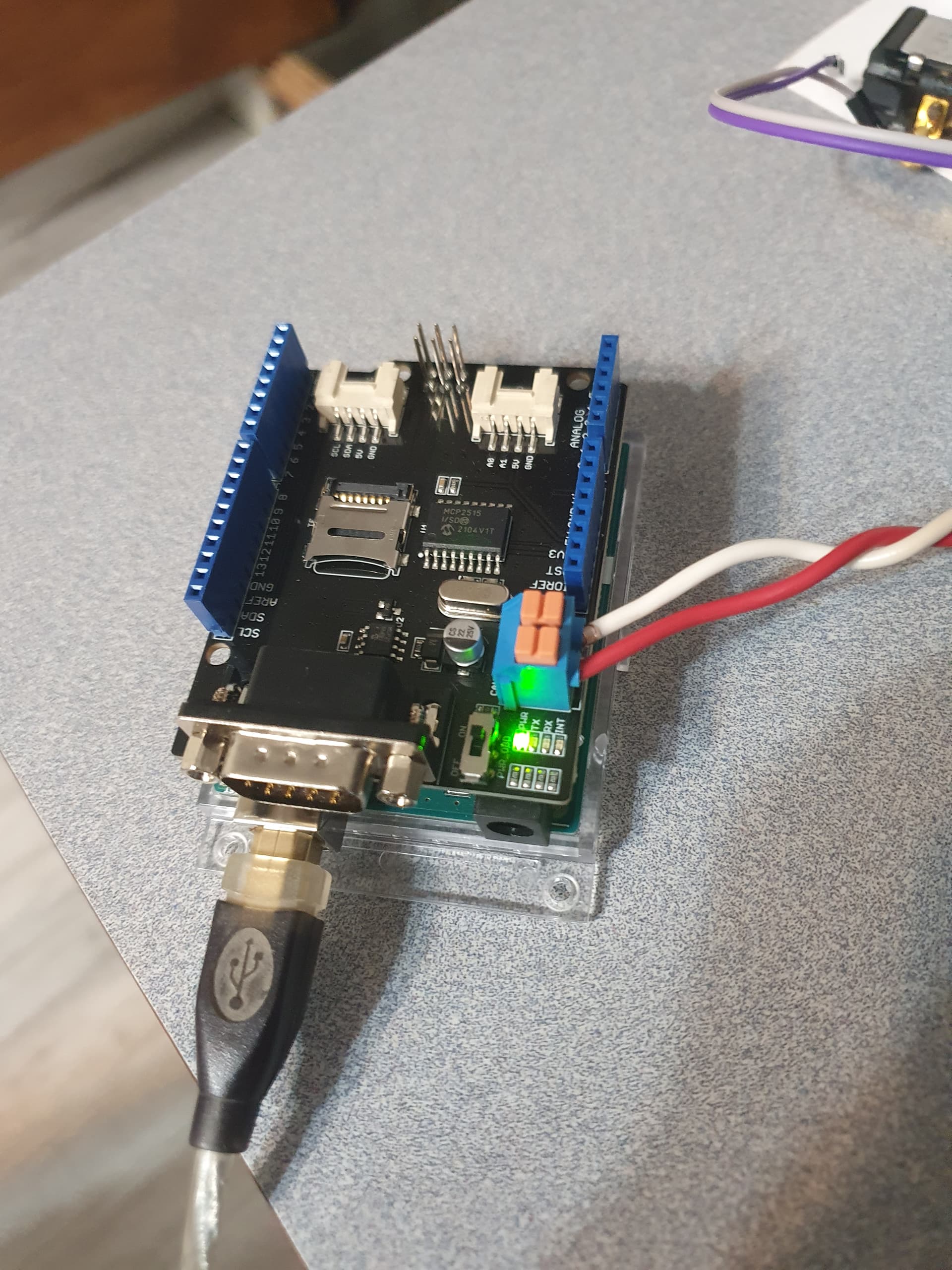
I have the arduino uno R3 i dont see any jumper cables, I just wired everything like in picture from file, my other one is working it shows my poti, switch, and interacts with the arduino.
Hi all, did anyone experienced a claas jaguar to get it steer via can bus? Unfortunately I havent got any electrical plan, not sure where to enter the bus and also which bus? Thx a lot for any help.
It is a jaguar 970 type 498.
Hello @bare.metal1
some time ago i used a mcp2515 with the library an i used the following (cut to a minimum):
#include <mcp_can.h>
#include <SPI.h>
MCP_CAN CAN0(10); // Set CS to pin 10
void setup()
{
Serial.begin(115200);
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(3, CAN_250KBPS, MCP_16MHZ) == CAN_OK)
Serial.println(“MCP2515 Initialized Successfully!”);
else
Serial.println(“Error Initializing MCP2515…”);
CAN0.setMode(MCP_NORMAL); // Set operation mode to normal so the MCP2515 sends acks to received data.
}
Without the “MCP_16MHZ” setting the communication to the mcp2515 did not work for me!
Those shields work good but I’m sure the are CS = 9.
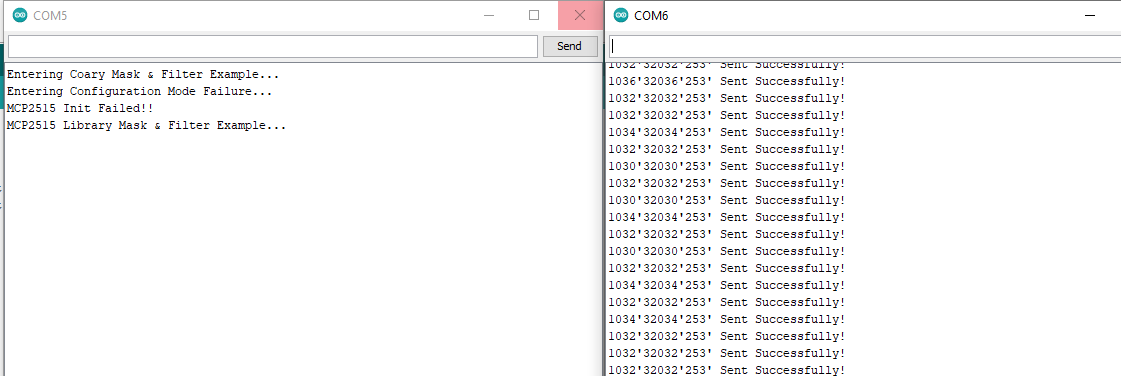
On the good one just check the first few lines in serial monitor, it can read the pot etc but fail at the setup.
I confirm , I have the same disc as in the picture bare.metal , cs = 9
There is a table with the pinout on the bottom of the board.
The settings MCP_8MHZ is used in GitHub - jkonno/AOG_CAN_valve: AOG ino with support for ISOBUS CAN valve commands /blob/main/Autosteer_USB_v5_0_CAN.ino depending on Arduino CPU Speed.
It says setup done.
So I am thinking it didn’t fail in the setup
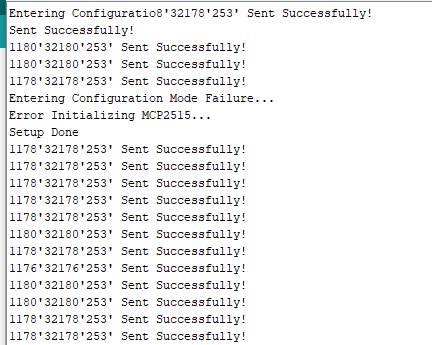
I tried setting CS to pin 9 and tried the hz on 8 and 16 but still don’t want to work for me. I am thinking i’m doing it right
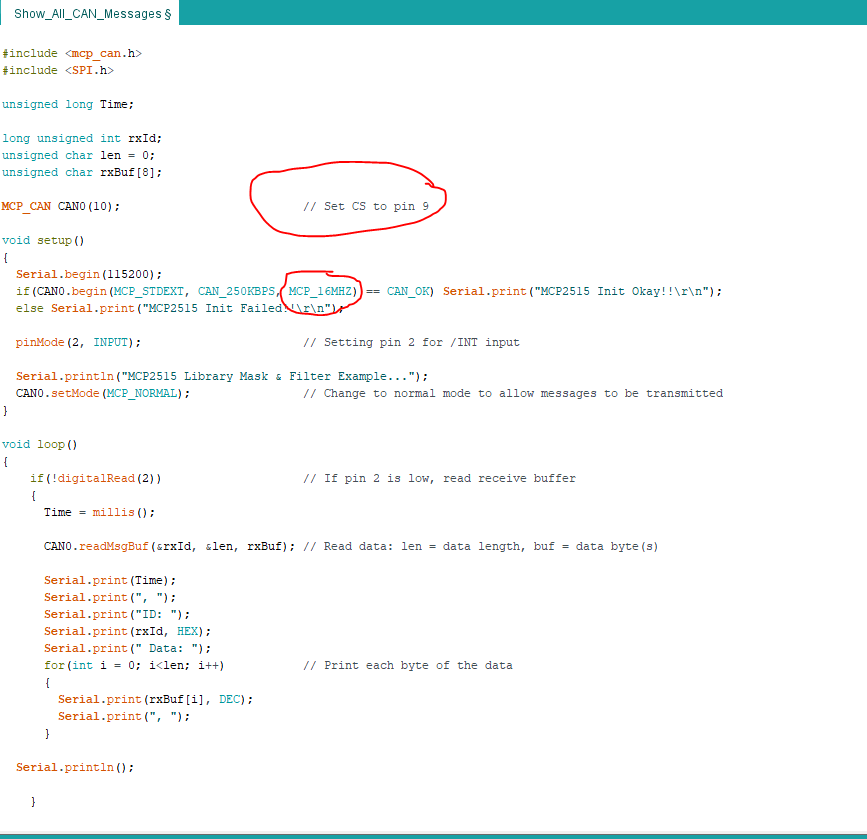
In the screenshot the comment says Set CS to pin 9 but the actual code to the left of it is setting it to 10. To be clear you did try MCP_CAN CAN0(9); right?
1 Like