As I have followed this thread I think all of the three are possible without problems!![]()
![]()
Hi, I have a problem with the availability of the MCP2562-E / P. Can it be replaced with MCP2551-I/P?
Fuctional they are mostly identical but …
MCP2562 requires Vio on pin 5, MCP2551 does not.
MCP2562 pin 8 is standby, MCP2551 Rs/slope control (for both just connect them to GND)
MCP2562 option is the SMD verison from LCSC / JLCPCB (LCSC Part# C191417) and then also need a small adaptor PCB
Thanks for the help. Previously, the smd version was also unavailable. recently they had to replenish stock
I have fitted Agopen to Claas and a New Holland T6. If you get Claas with cebis we have AOG working the headland management via can too.
I connected AGOPEN via CAN in the brand new T7. I calibrated the valve and set the sensor to 0 using the H menu. The tractor drives but the steering quality is not of the best quality. There are large variations that prevent the valve from reaching what the agopen is trying to set. As if the minimum PWM was set too low. If I drive the right and left arrows in the test mode, sometimes it will reach 0 error and sometimes 0.3-0.4 is missing. Can I do something else to improve it? Compared to my PWM controlled valves it looks poor.
Do you have the min PWM set to 1?
It must be set to 1 because it’s driving the set point up/down, it’s not like the normal PWM setting.
P-10
Max-200
Low-5
Min-1
Calibrated WAS correctly? Important even with CAN.
Rather correct. I warmed up the oil, it went through the entire procedure, it did not display an error, I repeated it 2 times to be sure. Before the calibration, it drove much worse, after the calibration you could see an improvement.
Maybe the Ackermann value isn’t set right!
In your video it look as if the error is much bigger when steering to the left!
I think it’s more important that there is no error in the lower degree range than an absolutely even left/right max. steering angle!
At least that was my observation!
It works a bit different to normal. Normally you would do a lot of tuning looking at the steer chart / error but with CAN it is not so important.
You should pay much more attention to the AgOpen settings like: wheel base, antenna location, counts per deg, single antenna settings, integral, etc. Those parts as I’m sure you know are important parts to fine tune.
Is it a Uno or Teensy CAN setup? Did you have the AgOpen tractor file so I can see all the settings?
What is the recommended INO currently for Valtra autosteer ready tractors with Arduino Nano/Uno + MCP? I finally plugged the modules to our Valtra S274 (2015) and I get WAS readings in AOG from CANBUS, but it does not activate steering even if moving or activation buttons/switches in any position. From the screen or physically. Tried with and without factory autosteer connected. Steers with factory setup as usual if connected.
I did not use Autosteer_USB_AOGv5.5_Valtra_10.9.2021.zip but some other CANBUS ino for Uno/Nano. Probably will try this one next, but please advice if there has been some more recent version.
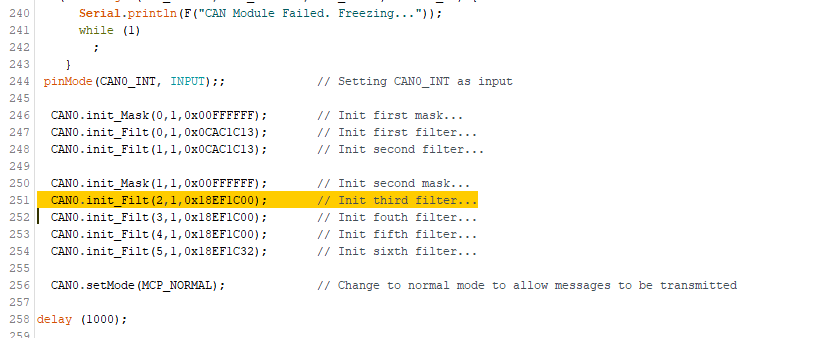
Try replace 0x18EF1C32 in your ino by 0x18EF1C00 .
It can be 0x98EF1C00 or 0x98EF1C32 too
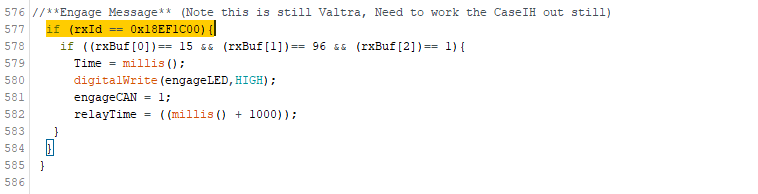
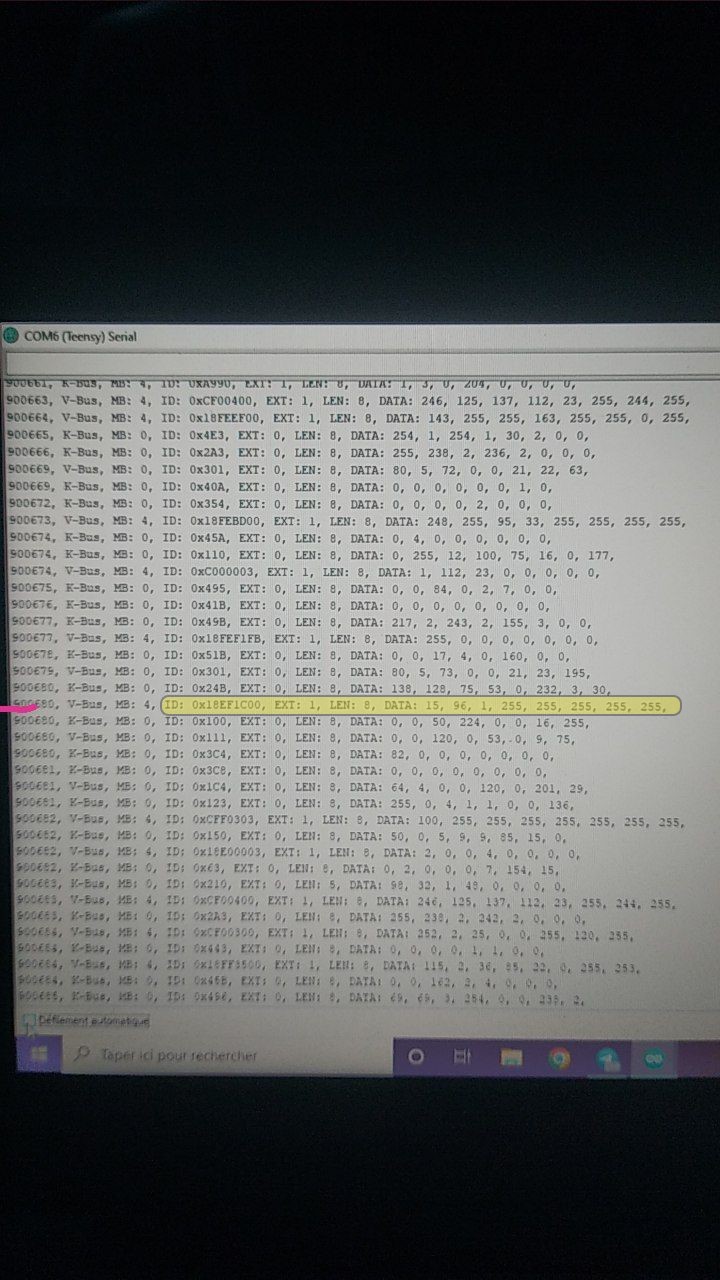
try this or log your can bus and find a message with 15, 96, 1 in data
1 Like
You can make a log of can message and find your button. you need find a message who begin by 15,96,1…
Does it actually matter in which order the Arduino/Teensy CAN board and tractor are started? I.e. does the tractor have to be powered on when plugging in/switching on the microcontroller, or the other way?
How about a steer switch connected to Pin 6; Is it required to obtain an operational state even though steering is configured to work from the on-screen button?
depend on wich ino you use ^^ tractor need be powered
I managed to get the tractor to autosteer with
Autosteer_USB_AOGv5.5_Valtra_10.9.2021.zip without any changes in the code.
Starting Arduino+MCP only after the tractor was running is probably the main think.
It seems also connecting a switch/button to Arduino Pin 6 is necessary for autosteer, no matter what options are chosen in the steer menu in AOG. With a jumper wire on Pin 6 and GND (tested as a switch or as a button) the steering also only started if using the AOG on-screen steering button. The autosteering only disengaged while turning the steering wheel and then continued again after letting go of the wheel.
I have a feeling that Arduino Uno+MCP shield only allows programming input when the CAN (and all other) shield is physically off, so the settings changes in AOG might actually not be transmitted to the ino. Will try next loading the settings changes and only then connect the CAN shield.
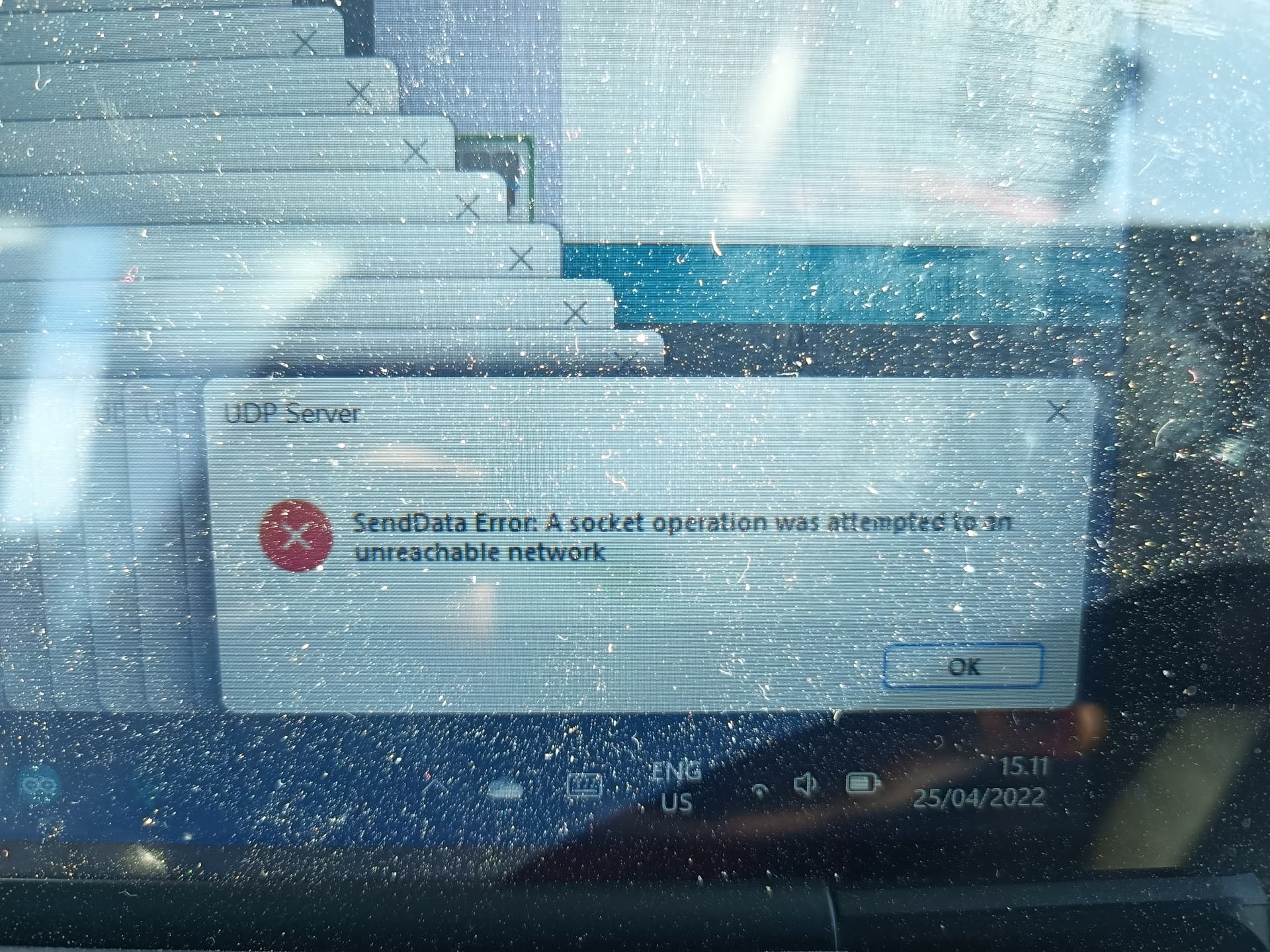
AiO also threw plenty of pop-up windows with the following error:
"UDP Server
SendData Error: A socket operation was attempted to an unreachable network"
I should not be having any UDP functions selected, so can’t think of why these keep coming while the system seems working othervice.
wich version of aog u use ? udp not activated in agio ?