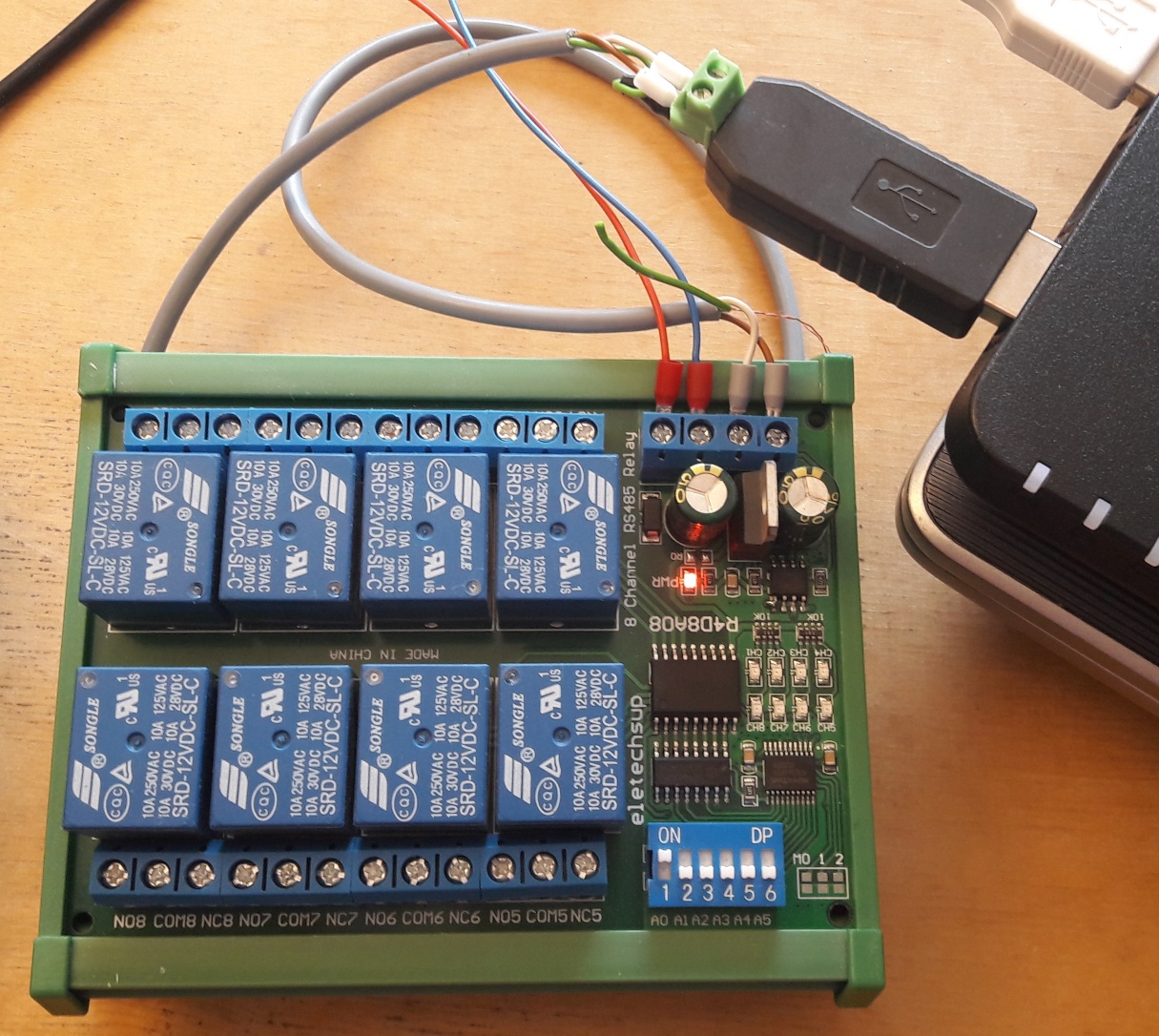
AgOpenGPS has a build-in section control for up to 16 sections. This post describes how to connect a Modbus board to AgIO w/o the need of soldering anything. All you need is a board like this, a $1 adapter for Modbus like this and some cable.
The A and B line is connected between the USB stick and the board and +12V supply is connected to the power inputs of the board. Connect to PC and run this AgIO instead of the original one.
Connection of a electromagnetic valve:
+Battery <-----> NO contact of relay
COM contact of relay <-----> coil of valve
other wire of coil <-----> -Battery
Connection of a motor valve (polarity reversal):
1st Modbus relay board:
+Battery <-----> NO contact of relay
-Battery <-----> NC contact of relay
COM contact of relay <-----> motor valve
2nd Modbus relay board (same Modbus address, same relay):
+Battery <-----> NC contact of relay
-Battery <-----> NO contact of relay
COM contact of relay <-----> other wire of the motor valve
DI is technically possible for sure, but not supported yet.
I should also mention, that those China modules don’t care about the Modbus specification much. This beginns with the timing: The modules ignore the mandatory dead time after each telegram. Furthermore, writing “coils” is not supported, which is intentionally made for relays. They use “analog holding registers” instead. Quite wiered. Is working well but may differ with different modules.
I have the first board now working with this! Easy easy section control.
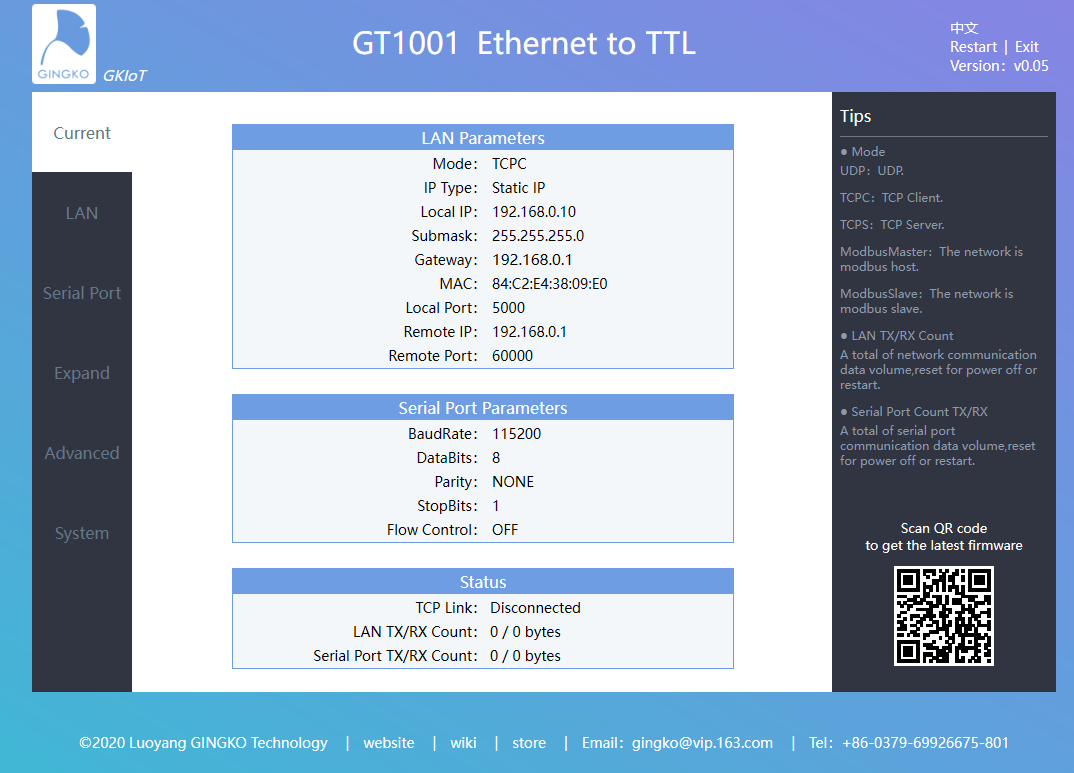
With the push to UDP I now have a second 485 board but with a Ethernet interface and 485 interface. 485 works but now how to point the same commands to the Ethernet interface?
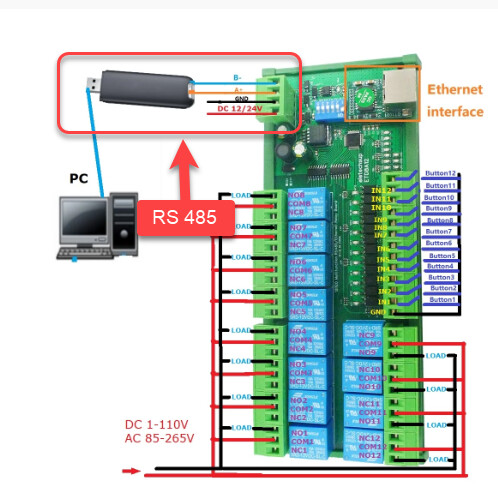
Also found a 16 channel relay only board with second Ethernet interface for daisy chaining.
Quite sure there is a lib for Modbus TCP. But I’m not so familiar with C#…
Modbus RTU is so easy to handle, that there is no need for any lib. With Modbus TCP, you’ll have to find a way to put that packet into a TCP frame. Didn’t try, because Ethernet to my mind has no advantage for AOG.
So the boards Ethernet card card has a web interface, looks like it just goes from Ethernet to ttl serial. So is this just a matter of taking @GoRoNb 485 commands and pointing them at a port?
Yes it will stream data to anything, even if its not even remotely close rtcm3 related.
*** update
Its harder than just shoving the data across, Ali makes a converter to go from usb to 485 ethernet… but then what is the difference in just using the twisted pair, not much.
You could take AGIO, and add Modbus TCP/IP with a timer to send the values to the boards similar to what @GoRoNb did with Modbus RTU.
I’m wondering if AGIO would benefit from something like MQTT to make it easier to hook up external applications. Or maybe there is something, and I haven’t come across it yet.
Fully agree - I already suggested MQTT two years ago.
In fact, there are two kinds of communication: Hard realtime for steering requiring low latency and low jitter and all others.
Realtime is GNSS, IMU and Steering only. For this, serial protocols are perfect, because the code has 100% control on the timing (apart from the part, Windows does). Best physics is RS485 - just two short circuit proof wires (or CAN - more difficult to handle).
All others may use WiFi (here, MQTT is a very good option) or Bluetooth (compatible with the existing data packets).