Good to know! Any info on availability, price…?
It will be cheaper then keya, exact price i do not know right now.
They are building eqipment for building motors right now, soon they make prototype we will test it, and i will post video how it works
2 Likes
First test with Keya motor (thanks to Nikolay for trying it!). Considering I did the code on the bench, I’m quite happy with this as a starting point. We think we know what the u-turn bug is.
This could well end up being a plug-and-play solution tho, with steering settings that can be used on any vehicle.

A
3 Likes
Is it CANBUS or Analog at your test setup? How could i start testing it with an AiO v4 Micro Board, Teensy 4.1 for now? Or should i wait @andyinv ?
Analog WAS, CANBUS motor. You can use PCB4.1, need to change which CAN port it is in the code tho, think it’s different from 2.4. CAN3 to CAN1 I think.
edit: it’s CAN3 in the code, for Micro AIO 4.1
I just got it working on my v4 micro. Send me a PM if you want help.
Might be a good idea to help each other here, so everyone can learn? Or write up a success-story and document the adventure?
1 Like
That is a great idea but there’s no extra time these days. I had intended to send him my edit of your code but I’ve now created a Keya branch on my forked repo. I’ll share it momentarily.
Here’s my latest.
I used a lot of code from @andyinv but with a slightly different approach with minimal changes to the official firmware so most of the Keya code is in the Keya file.
It also has a potential fix for when using a steer “switch” and current/pressure sensing. I think it’s otherwise in sync with the latest official firmware
3 Likes
engine arrived this morning. I don’t know how to start the engine. Which pins should I use? Can you help me?
I have the first version cards.

There is no can2 output on the PCB. i can create an external PCB and output can2. Or I can buy a canbus module.

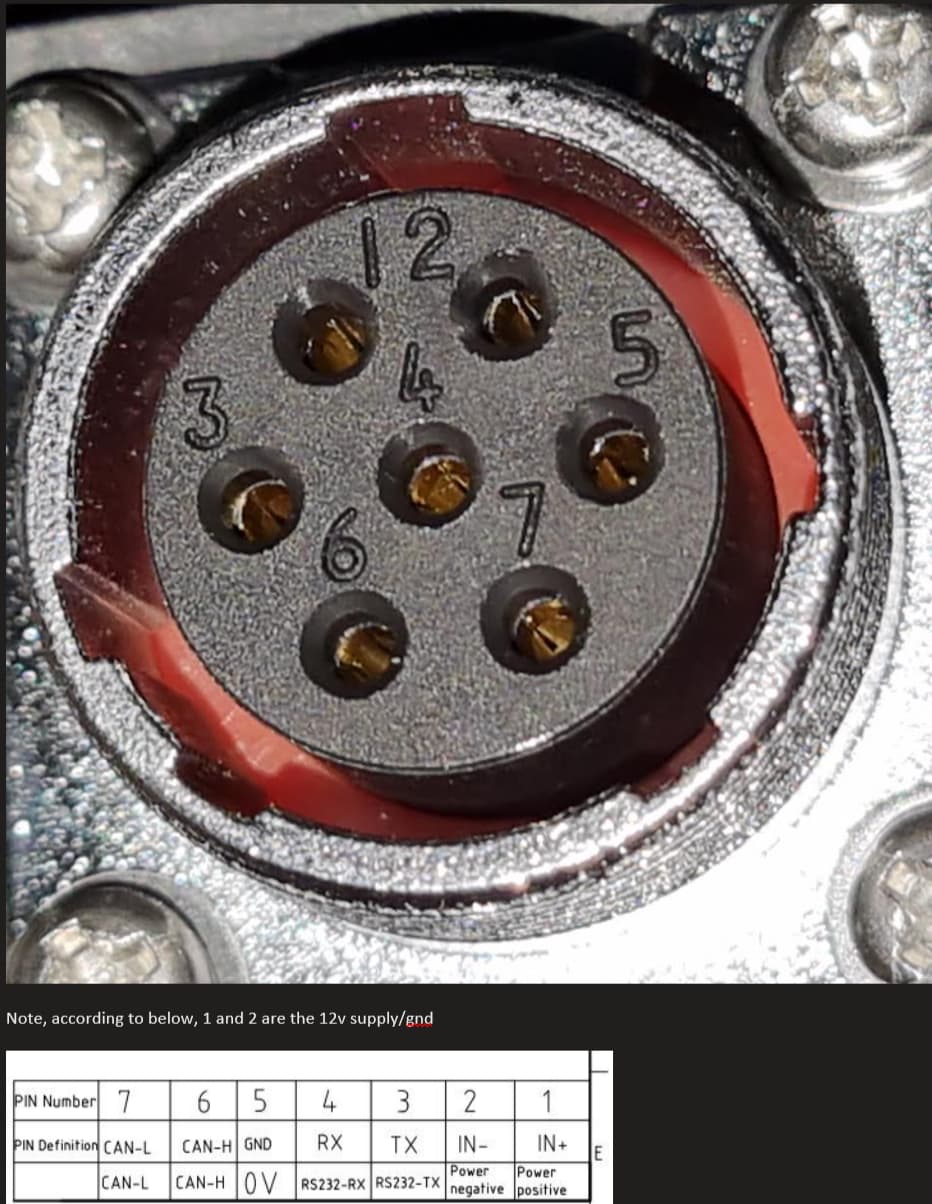
use pins 16/17 on the ampseal, with PCB4.1 std, but I’m not sure what board you have there, nor whether you have any transceivers?
This looks very interesting, and I don’t know if this would be the correct post to reply to but i was thinking about getting a keya motor for our combine and I got to thinking about the encoder. Does anyone know if It would be possible put the motor on a swather, since the steering wheel doesn’t drift like an orbitrol, and using the encoder instead of wheel angle sensors on the pumps would certainly make the install easier. I just don’t know if you are able to pull out the angle through the canbus
Keya can report wheel angle, but because hydrostatic drifts there was never any point doing that. If you’ve a vehicle that maintains an exact steering position for wheel placement, it could be worth a try.
1 Like
I think it would be possible, since the swather steering wheel can’t drift, but how do you tell agopen to look for the was signal through the can bus, I’m guessing a little bit of code rewriting?
@andyinv would you know how to pull out the angle from the keya and feed it to aog through the can bus?
I’ve done it, but just in testing. It’s all documented in the PDF they have for it tho, but currently no firmware supports it afaik.
I must admit I haven’t done much coding and certainly haven’t worked much with canbus since both of the tractors I installed aog on weren’t steer ready but that doesn’t seem like any reason not to try, if I can’t get it to work properly on the swather I’ll just mount the keya permanently on the combine
You want to use keya feedback as WAS in AOG?