Thank you,
model is:
Model: KY170DD01005-08
I believe that is the older one,
septermber 2021, delivered, thank you
Thank you,
model is:
Model: KY170DD01005-08
I believe that is the older one,
septermber 2021, delivered, thank you
In this case the output_type on line 74 in the code has to set to 8. I think your motor should work with this, but - for your information - there is still no code for the feedback programmed, I’m sry.
Just adapt line 27 an 28 to your wifi-settings, 41 and 42 to your wifi-ip-range, make sure that your are in the same wifi-network with your computer and it should work… hopefully!
AOG_Autosteer_ESP32.zip (639,5 KB)
I recommend you to install a software like RealTerm RealTerm: Serial/TCP Terminal download | SourceForge.net , connect the RS232 back to your computer and test if you receive some data…
thank you, I will do it tomorrow, I will keep you up dated with the evolution
Did you have success?
Hi, I hope so, I will know more next week, I found some one to help me;
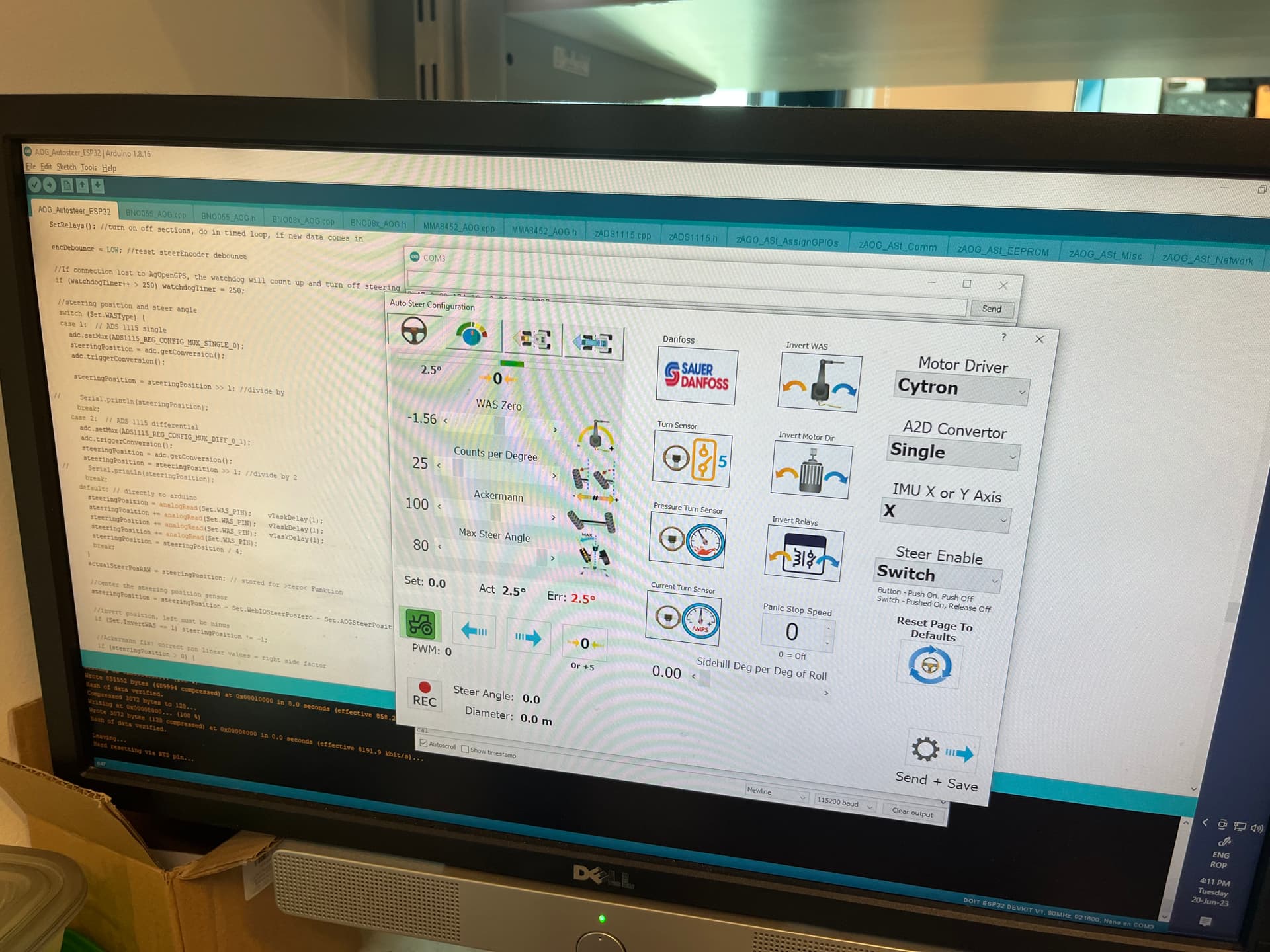
I was able to set it up,
Also do i need to use the inclinometer, and also how to use the sensor for break the engine power when the operator is taking the wheel?
I wasn’t able to test and program the automatic-turn off because I have no motor to test. I’m sorry…
If you can write me the correct motor-feedback I perhaps can add it to the code…
ok, I will keep you posted
HI, this is what I have now in application: I have roll and heading and GPS, I also posted on telegram
What interface do you use to control the motor? CAN, Analog, or RS232?
RS232 is the communication protocol
Just got one of these motors today, and am talking to it over CANBUS. Has anyone done any work on that so far?
Got the speed worked out, here’s my findings so far:
How it seems to work:
OK, so it seems to operate in 3 modes (changeable via their windows-xp-era software). Default is speed, the other is relative position and absolute position
Send an enable command first - note that it will immediately replay the last steer setting, so only steer when you want to steer, send an immediate steer signal and then a disable.
Basic commands (first 4 bytes are always same, except enable/disable). All bytes must be 8 in length
Enable 0x23 0x0D 0x20 0x01 0x00 0x00 0x00 0x00
Disable 0x23 0x0C 0x20 0x01 0x00 0x00 0x00 0x00
Fast clockwise 0x23 0x00 0x20 0x01 0xFC 0x18 0xFF 0xFF (0xfc18 signed dec is -1000
Anti-clockwise 0x23 0x00 0x20 0x01 0x03 0xE8 0x00 0x00 (0x03e8 signed dec is 1000
Slow clockwise 0x23 0x00 0x20 0x01 0xFE 0x0C 0xFF 0xFF (0xfe0c signed dec is -500)
Slow anti-clockwise 0x23 0x00 0x20 0x01 0x01 0xf4 0x00 0x00 (0x01f4 signed dec is 500)
0xf831 is max -1999
0x07d0 is max 1999
Anything other than ffff or 0000 in the speed command [6-7] means it goes nowhere
Speed commands are not left and right as such, but “-80rpm to +80rpm” (max speed is set in the software)
Short video here: Telegram: Contact @agopengpsinternational
Maybe @Keyaautosteer can help out with this.
HEX Tabelle in Motor Checksum.xlsx (128,3 KB)
Check this doc. Its from RS232, but perhaps in canbus is the same, I don’t know.
Maybe the file is different depending on the software version
Got some info direct from the manufacturer at jinky.com, this manual has some additional info, including how to set the mode (speed, absolute-pos and relative-pos) from CANBUS.
That will be useful, I think relative-position might be more appropriate than direction/speed.
A
KY170G Electric steering motor user manual V2.4.pdf (1.0 MB)
Andy, I don’t think position is really useful for actual AOG. (But you can try if you want)
As I know position doesn’t give the same values always, that’s why you can’t use it.
Yes, it would be very nice because if position would work you could work without WAS. But - sry - I don’t think that it works correctly.
The reason I was going to try position (or even relative position - not so much absolute) was the John Deere ATU200 doesn’t have a WAS, it just made me wonder; I think they rely on the position a little more. Am trying to think of how AOG uses the CANBUS code in place of PWM etc to start/stop motor. Once I understand that properly, I can map a way forward.
Getting AOG without a WAS would be really a big step forward for AOG!
Theoretically it can be possible, my Trimble OEM works without WAS to. But I don’t know how…
Someone - I don’t remember who - played around to get AOG to work without WAS a few time ago. Perhaps working together would be great for you.
Keya working with AOG. Still some stuff to do (current/intervation override etc) but AOG is steering it and with changeable speed too: AgOpenGPS with Keya Motor support via CANBUS - YouTube
Code is in my Keya branch for the moment, I’ll push it up to Brian’s once I get in a better state. If anyone fancies trying it in the field. I’m using CAN2 on an AIO PCB2.4 at the moment, my 4.1 hasn’t arrived yet. Still to work on the AOG-side to choose Keya as a motor, might add it as an option to the Cytron/IBT menu?
Many thanks to all for the advice on using the not-CANBUS code as the base, it turned out relatively simple
My friends are getting equpment to start producing brushless motors like keya .
And it will be agopengps ready.
No aditional code needed, plug and play.
Waiting to see this!!