I use ardusimple base file, for NTRIP master default baudrate is 115200 if you want Ortner config it’s 38400 so change it to 115200 in (CFG-PRT) UART2.
1005: Stationary RTK reference station ARP
1074: GPS MSM4
1084: GLONASS MSM4
1094: GALILEO MSM4
1230: GLONASS code-phase
and after using config check if this messages are enabled on UART2. (CFG-MSG)
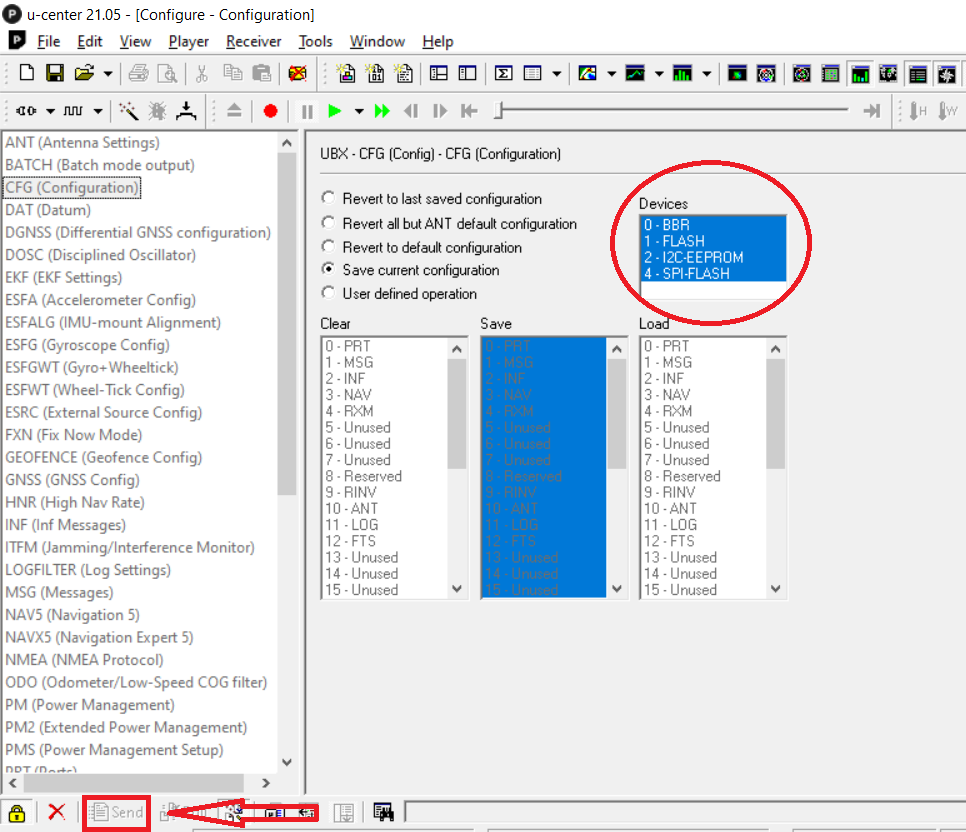
You can save config like this.