Did you try the other two config files?
In U-Centre the base should show “3D” fix when survey has not finished, when its finished and locked in it will show “TIME”
If you look in messages view, scrow down to NAV - SVIN (Survey In) you can see the progress. (With my setup when > 300sec and < 2.5m survey is finished)
or
Open note pad, save two blank text files as bruno base & bruno rover. Then open u centre and transfer config files from rover and base to these files. Post them here and we can tell you excaty what is wrong in the files.
high Tony
I get 3D fix , I don’t get TIME perhaps linked with my approximative Lat/Long
did not try yet the two config files : tomorrow
I send the bruno base and bruno rover asap :good idea
good day
Tony
got mad with ucenter :couldn’t install on my surface pro4 ( some dll missing )
but got a old v20.0 on a very old windows PC !!!
so I join here some files : Andreas’s files
base + rover
and a copy of the sentences I get on U center plugged to the ardusimple base with ortner-base file . the firmware is the 1.13 one from ucenter
The next step is the use of Tonybase and tonyrover ,but can you give me your opinion on this setup before I re configure everything
thanks
brunobrunoRover.txt (5.9 KB)
Basis_Station_fw113_msm4_1hertz_usbv2.txt (20.9 KB)
simpleRTK2B_FW113_Rover_AOrtner_10Hz-01.txt (20.9 KB)
Just reconfigure with the files I sent you.
The base file of Andreas’s is not made for radios, it is used for USB only. (Connecting to computer / ntrip)
Load the config files through U-Centre- Tools, Reciver Configaration, Transfer File > GNSS.
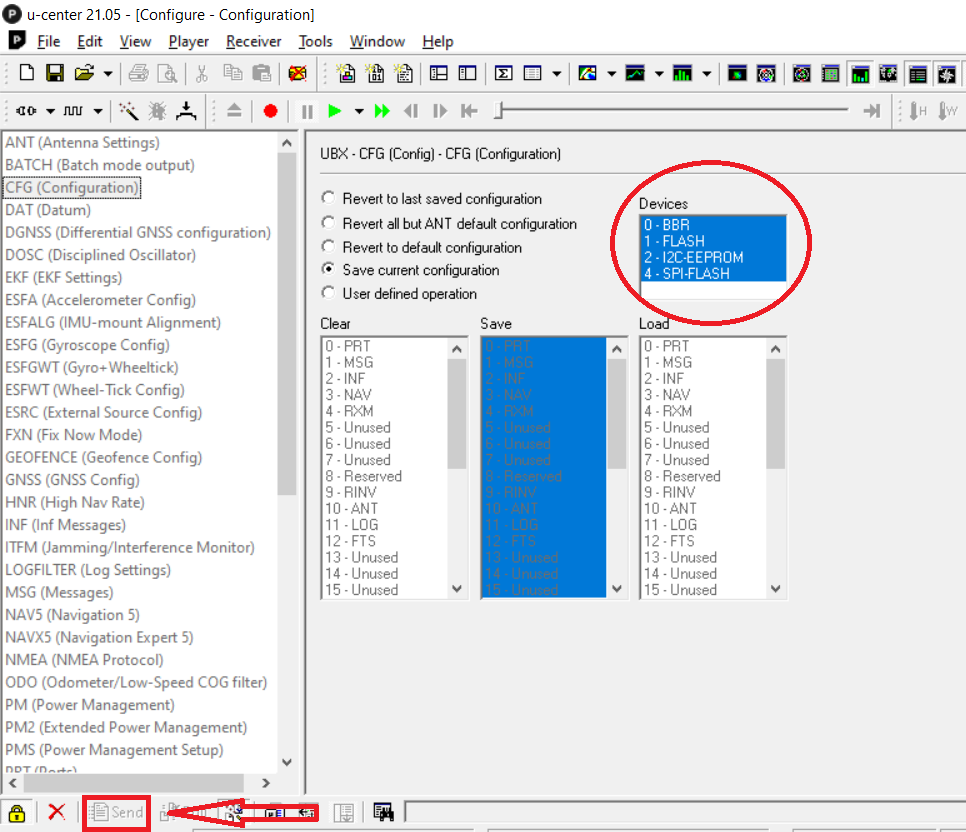
Click - View, Configaration View, 3rd line down CFG (configaration), highlight all 4 memorary locations (hold Ctrl when clicking to highlight), click send in bottom left.
Then you can open View, Messages and see all the info messages
ok Tony
I will do that
Pity Andreas did not explain that in detail :lost time with
I was wondering why the "factory " configuration was working perfectly and not the conf I found on the forum
Know now why I only get GPS single
have a good day
bruno
wonderful
got rtk fix in seconds !
Now two short questions
can I move the base in each field I have cause they are distants each others : more or less 20km
can I add two more rovers to the base :if it is possible ,it would be great !
many thanks anyway
bruno
Seems you are using radio from the base to the rover. You can have an infinite number of rovers as long as they all work within a decent distance from the base.
You can move your base but ideally you should have an accurately repeatable installation position and you should use the same surveyed position at that particular base site. Obviously with a single base, rovers would need to be at that base area if the base does not cover all your fields from one location. NTRIP would have solved the range issue if you have any decent cellular coverage but better to consider that later, take one step at a time.
1 Like
ok
I consider Ntrip for next winter !
For the base moving ,if I understand correctly , Better if I use the same position each time ,and with an high accuracy :better than 1 meter
Otherwise , a completely new different position will require 1 hour or two for UBlox to get the satellite ephemeride as I did yesterday for my first try
Is it so ?
bruno
canterbury is a magnificent region !
A bit of a matter of opinion but I’d say the base should be placed to the same spot with an accuracy of 1 cm or less. Otherwise you lose a lot of the RTK benefits.
The same if you do a self survey of only a couple of hours. The self survey accuracy is OK if you always use the same coordinates at the same spot.
You can use as many rovers as you like as said above.
No problem to move the base, it’s set for 5min & < 2.5m. That’s good for what your doing.
If you come back to old lines and reset your base you might have to centre / nudge your lines but they won’t move while the base is powered.
You could have a few spots where you want to put the base and survey them in over winter, then when you put the base back there you could enter those coordinate and use it with great accuracy
I am trying to set up a base with the Ardusimple RTK2B starter kit and Wifi ntrip master. I am confused as to what base station file to use. Should I use the ardusimple base file or the Ortner base file? After reading this it appears the Ortner might be configured better to start with but I am new to using U-center and am not sure exactly what needs to be changed to allow it to work properly.
I use ardusimple base file, for NTRIP master default baudrate is 115200 if you want Ortner config it’s 38400 so change it to 115200 in (CFG-PRT) UART2.
1005: Stationary RTK reference station ARP
1074: GPS MSM4
1084: GLONASS MSM4
1094: GALILEO MSM4
1230: GLONASS code-phase
and after using config check if this messages are enabled on UART2. (CFG-MSG)
You can save config like this.
So I have the ardusimple base and rover kit (with LR transceiver) and when I want to build my own base (no ntrip) should I use the Ortner files at the top of the topic?
Here is the two configarion files I use. Rover uses corrections from radio, and base is portable via radio just plug in wait 5min and its away.
Tony Single Rover.txt (20.9 KB)
Tony Base.txt (20.9 KB)
(Post 117)
2 Likes
Yes, Ortner configs are for NTRIP only, use configs that @clod.fr posted.
What are rules on language on this forum @admins can’t find any ? I understand that English is not primary language for a lot of us but we try to translate replays to English as universal language that most of us understand.
Replaying in other languages leads to confusions like this.
I see there is French side of forum (option on top of site “Français”) or maybe replays should be in original topic language if topic is starter as French all replays should be in French ?
1 Like
Hello
Yes it’s a post that I copied and pasted I hadn’t seen that it was in French.
I always try to answer in English so that it remains understandable by all.
sorry
2 Likes
hello
Someone have a rover config 10hz for the f9p firmware 1.30?
Thanks