plus No RTK fix whatever I try !
You’ll need to change the configuration to accept the rtcm corrections from UART2 on xbee to get rtk. I’m not sure off hand which settings though.
Did you reset the configs to default before updating? And for the base, did you start a survey-IN or enter a fixed base position again? Can you see RTCM data leaving the base and/or entering the rover? (you should be able to verify this by monitoring IO on the interfaces through u-center)
Travis and SjaakA
to Travis Ok I shall do
Just need where to look in U-center : ucenter is not user-fiendly
To SjaakA : I did not reset the configs to default ; today I made 20 config under the FW 1.11 , 1.12 and 1.13 I have seen somewhere the possibilty to go back to default conf
and the different Ortner versions of his files
Please can you give me the way to get the Rtcm data
Thanks
Bruno
To activate the base you have to issue the command TMODE 3
(in U-center go to messageview by selecting View\Message View\
Then select UBX\CFG\TMODE3
Now there are two options:
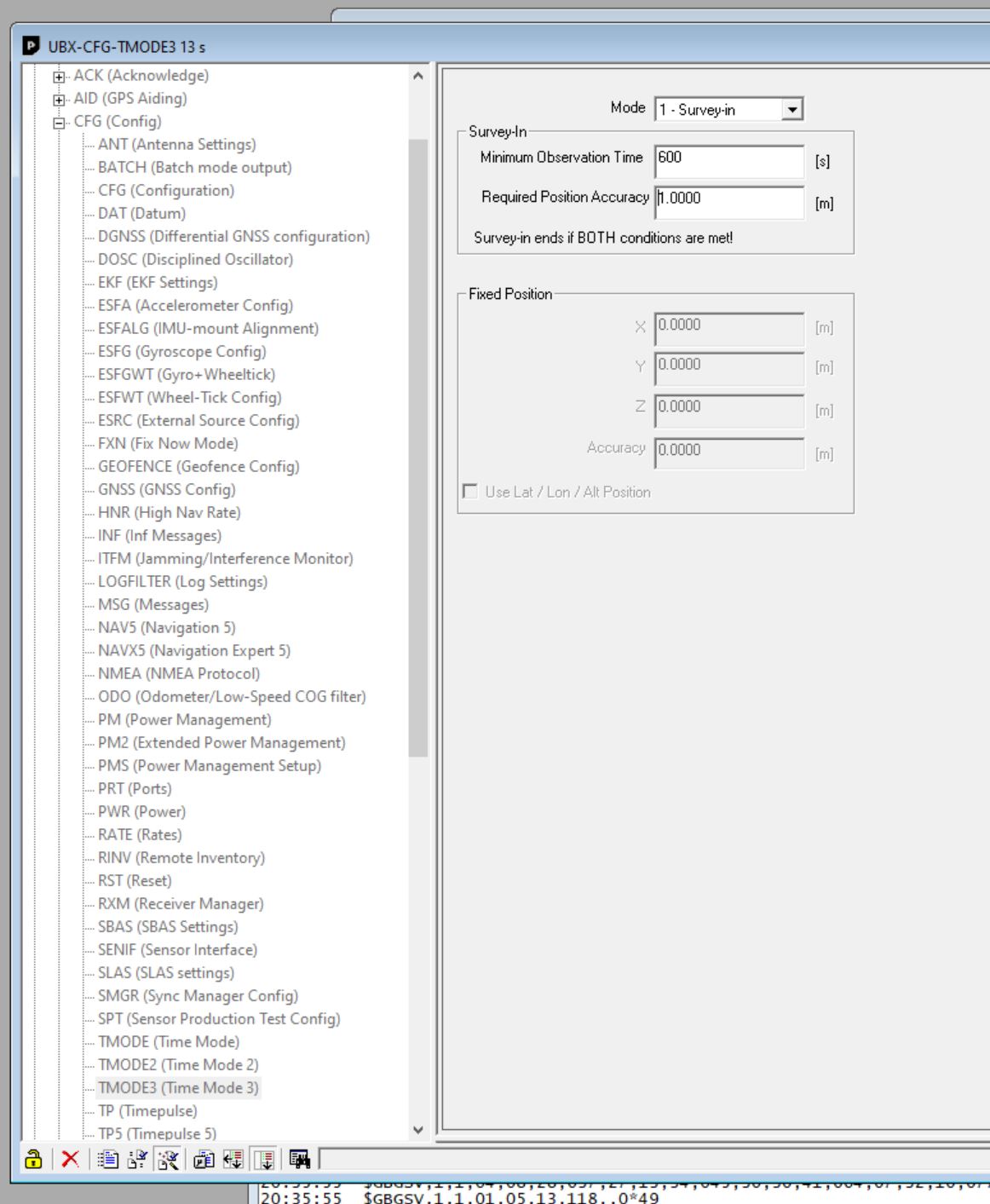
-
Survey-in
Depending on the accuracy you set the receiver will now take time to determine a good average position. To get within 10 cm. it will probably need something like 10 hours. (if you happen to know an NTRIP caster in the region this may help a lot, set in as NTRIP client in U-center) -
(Known) fixed position Here you can set a known lat/long position.
Save the message in u-center, save the config and your good to go.
When you want verify the RTCM messages, you can connect a cable to the second USB port near the XBEE slot. With terminal software (like Putty or maybe just a second U-center instance) you will see the RTCM packets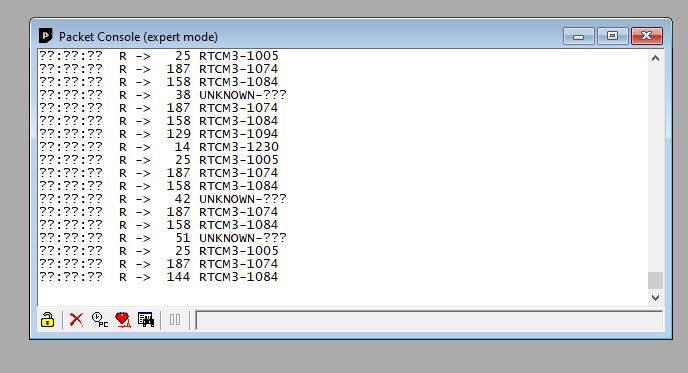
1 Like
thanks so much!
I found the Packet console and got something very close to your image
R → number RTCM3 number
Not completely lost now
I follow the procedure and tell you the issue
As I use the base in different locations (field far each other ) and I do not use NTRIP
Is it compulsary to set an accurate position ?
When you want repeatable accuracy between field operations or even years, yes. But when you only want to drive straigth AB lines, the exact base location of your refrence point is less important. (I find myself shifting AB lines pretty often anyway, depending on crop, and type of implement etc., but I do keep record of AB line headings)
1 Like
Hi SjaakA, due to my language I have difficulty in understanding some terms, I use my base station and rover system in my vehicle (2x ardusimple rtk board), I don’t use ntrip, in this case should I use option 2 in tmode3 menu to get exact accuracy? If I’m going to use it, what should I enter in the latitude and longitude values? Or what does the 1st option, the survey in mode, do in my case? should i use it, thanks.
super Whiterose!
in the end ,have you succeded in getting fix?
I do not yet : the rover seems unresponding to the base
I shall complete the TMOD3 in U-center and see what happends
You can monitor the survey-in progress with UBX\NAV\SVIN. When you are using a radio link you might need to change the baudrate on base and rover. IIRC it should be set at 115.200
Hello Whiterose, luckily we have a foreign language in common, but I think most of us always have translate to their native language… So I hope I understood your question correctly.
To determine the exact position of your base station, there are several options.
- You could do a long survey-in (12 hr+) and get approx. 10 cm. accuracy
- You can gather GPS data over a longer period and send it to an online service (RINEX format) for postprocessing. (± cm accuracy)
- Do a quick survey-in with NTRIP input enabled in u-center. accuracy ±2 cm)
- Take coordinates from Google Earth (accuracy may differ between regions)
But, as I mentioned above, if you only want do a neat planting job once, it wouldn’t matter even if the base position was 100 m. wrong. You will know where you want to start planting and the autosteer precision between passes will be your usual RTK accuracy (1-2 cm with 2 F9p’s)
1 Like
If you put in coordinates 100 m beside the actual, in the Base station then you might only get Dgps or single.
even 1m accuracy from base is enough to get RTK, as long you enter an almost correct position (as fixed position) in base.(BUT then DO NOT move your base antenna) or next year AB line will be wrong.
Also Be aware to enter Coordinates in correct type : How To Read GPS Coordinates | Ubergizmo
AND remember to use correct . or , Some languages like mine, do it different but it must be like this 41.40338, 2.17403 41 a dot 40338 then a comma and 2 dot 17403
Depending on which format you have to input the coordinates, this link might be useful: GPS coordinate converter
I know because my skytraQ Base output another format than what was needed in rtk2go NTRIP caster using STRSVR ver.demo5
(my rover is a F9P)
Hi every body
I have a base that seems ok : get Rtcm3 sentences +glonass ;beido,gps .
the baudrate , 1 hz , set to approx coordinate writen the right way ( specialist in GIS and datum wgs84 , utm … )
The packet console give me hope that I am near the end of the tunnel for the base ( ardusimple rtk2b with F9p + Xbee for radio communication to the rover ) I do not use Ntrip ,only radio communication base-rover .
everything is threw USB
So I re verified the FW of the rover 1.13 , the config ( from Andreas ) and all the details I read in this thread .baudrate ,herz at 10 , save the right way -i hope !
Plug U-center to the Rover and read the packet console : got GPS fix plus the GGA and VTG sentences . BUT when I plug the rover to AGOPEN got GPS single
I let it for 2 hours with no results
The coordinates of the base are 10m approx
I cannot understand why the ASimple pair of preconfigured base + rover I bought worked perfectly with agopen within seconds ( 1.12 FW +1hz base +1hz rover . More ,I did not set the lat,long coordinates
I am desperate but confident that you could help
bruno
I know it is a different F9P but came to think of the problems I had with getting bluetooth working on mine.
Could be it is a setting like that you need to change?
My problem was that VTG was only selected for USB.
On the base do you see the GPS → XBEE LED flashing?
On the rover, do you see the XBEE → GPS LED flashing?
When you swap the rover from u-center to AOG, is this in the same location with same radio coverage? Did you disable all messages except GGA and VTG going to AOG?
In u-center you may check IO. UBX/MON/IO should show the traffic on the several interfaces.
UBX/MON/TXBUF could show eventual buffer overflow issues.
Are you using ardusimple config on the base? On the rover with the aortner config using the radio I think you need to enable rtcm3 on (cfg-uart2inprot)
With aortner base enable rtcm on cfg-msgout uart2 and on cfg-uart2outprot
I’m not by my computer with my configuration files but I think that’s what I did.
Here is the two configarion files I use. Rover uses corrections from radio, and base is portable via radio just plug in wait 5min and its away.
Tony Single Rover.txt (20.9 KB)
Tony Base.txt (20.9 KB)
thanks for your responses to SjaakA ,Larsvest and Tfriesen and Commonrail who is already 2022 !
I shall try each of your advices
Few answers: base and rover have Ortner files
When I swap the rover from Ucenter to Aog , I do not move the tractor
all the messages I see in Aog are GGA and VTG :all other are disabled by the Ortner Conf
I will also see on the rover : anable Rtcm3
and on the base ( with Ortner conf ) enable Rtcm
I am a nerd on theses sentences
also have a try with Tony base + rover files
bruno
On the base do you see the GPS → XBEE LED flashing?
On the rover, do you see the XBEE → GPS LED flashing?
just the opposite !!!
for the two of them :perhaps a key to solution ?
On IO window there is nothing quite interesting :
Txbuf :no overflow
to Friesen , Have looked to RTCM config
rover : rtcm3x is enabled
base : rtcm2x is enabled seems Ortner’s config ok
Again : the base on power and the rover plugged to U center got
" GPS fix : 3D "
and gps single when Rover plugged to AOG
as far as I have seen , could not re re verify wether or not all NMEA messages are disabled ; all I see in Package-view are GGA and VTG sentences
Could you give me the path to follow to disable all nmea message except GGA and VTG ; even if I think it is already done with Ortner’s config
happy new year to european people
bruno