Hello! I’m fairly new to autosteer in general. I tested out the lightbar guidance with a cheap GPS receiver. I want to get Autosteer instead of just the light bar. Are there any parts lists? How much does it roughly cost? Thanks
Excluding base station (around 300€ but can be used with multiple tractors or you have one nearby allready).
Rough cost of aog system per tractor 500€. Main problem is that you have to order min 5 pcbs what ever you choose. (There are options for only 2 with parts) or older pcbs like pcbv2 or kaupoi and sorce only needed parts.
Minimum as cheap? You need pcbv2 with nano without IMU ~50€ (parts from ali/digy, solder yourself) motor 70-150€ (heavily depends on local price and model). Tablet 100$ and f9p kit 211€. And things like cables, tablet charger etc. (IMU 20€ good performence increase can be reused for panda) if you have 3d printer 1kg of petg can be enough for motor gears and box for pcb.
If you want panda then all in one pcb with teensy 4.1 it shoud be cheper then pcbv2 + panda board. Someone that recently build can confirm?
Bare minimum would be with WAAS instead of RTK, a cytron, IMU, steer motor, WAS, and arduino nano. I assume you already have a F9P and a tablet. You could solder that all to a perf board and get it working.
If you wanted to go with a PCB the v4.1 fully assembled with teensy IMU and cytron costs about $260 CAD to build a single one with shipping and taxes.

Would I be able to use these parts for a simple autosteer? Would it still work today? It also doesn’t have to be RTK, just has to drive straight enough. Where to get parts? Thanks!
Yes you can do birdsnest wiring, but to make it work with today’s AOG program, you must follow the pcbv2 type schematics like they do in this thread. Help with steer motor
To get parts, then Google Nano, and ibt_2, to buy in your area.
Some also use an imu (not neccessary) which today would be bno085.
You can exchange ibt_2 with cytron md13s motor driver which most people use today (I still use ibt_2 in my systems running the latest AOG programs)
So would there be anything else required besides a tablet and a GPS?
WAS to read position of front wheels
Motor to turn steering wheel.
Alternativ a hydraulic valve system to turn wheels.
Have a look at videos: https://www.youtube.com/channel/UC5ZoNVrlkzUIRmpe8_9CTGg
The ino´s are in Boards: https://github.com/farmerbriantee/AgOpenGPS_Boards
but scroll down and check WIKI and more
By chance, do you have any pictures of your old setup? So far I’ve got an antenna, the tablet, the cytron, and the nano. I haven’t decided what motor to get. Will I need a step-up converter for 12-24v? I don’t believe I need anything else, but please correct me if I’m wrong. Thanks!
Buy a 12 v motor, and you don’t need step up.
My bird’s nest was used together with AOG version 3
So connect as shown in my link above.
Schematic for AOG version 5.
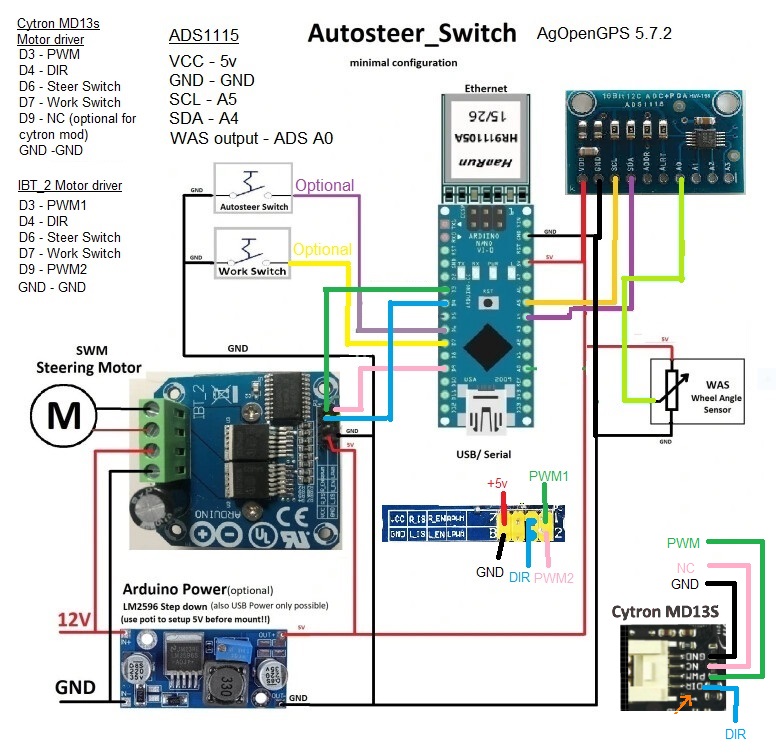
You need ADC, WAS no longer goes directly to nano.
If you plan on using RTK go with F9P kit for gps.
Its better to use linear regulator for WAS +5v then USB power for stability. You need DC brushed motor (12v if you dont want converter). Wheel on steering wheel or gears and motor holder. and that should be enough for autosteer.
If you go with this schematic roughly:
Nano ~3$
ADS1115 ~2$
IBT_2 ~3.5$
LM2596 ~1$
Dupont wires ~1$
Motor ~100$
GPS ~250$
WAS ~15$
Cable for WAS ~4$
10A fuse and holder ~1$
Cables for motor and 12v, ~1$/m.
If you have 3d printer you can print box and gears.
1kg PETG ~20$
Tablet ~60$
Charger ~10$
Phone Charger (if hotspot is used to have internet on tablet) ~2$
USB Cable x3 (F9P,NANO,Phone) 3$
Should not exceed 500€ even if you have to buy everything needed.
Going for lower rpm motor reduced gear ratio needed on steering wheel so they are cheaper to make.
Many use phidgets motor 3269.
Now if I don’t want to do RTK would I be able to do without that RTK board that you linked? I don’t need this system for planting or anything, it would just be working ground. Would I be able to attach a antenna straight to the computer and it do the same thing? Thanks!
You need a gps module for AOG and the F9P is always the recommended module even if you don’t want rtk. The F9P has been the standard module for AOG because it is very accurate and relatively cheap and available. You do not need to use RTK with the F9P but it is capable of running it.
1 Like
In theory any gps receiver can work main problem is accuracy, cheap gps receivers are not accurate.
F9P can be used as single and achieve relatively good accuracy.

No you need board also, antenna goes to board.
The board above is the F9P board the antenna is not the F9P and is not the GPS receiver it is just an antenna. To plug the antenna directly into the tablet you would need a tablet with a very high quality built in GPS which is virtually non existent. So you need to add a high precision GPS receiver that can handle the incredibly precise timing and communication needed for accurate GPS.
So my parts list is like this
-Nano
-Cytron
-WAS
-ADS
-Dupont wires
-WAS wire
-Phidgets 12v motor
-simpleRTK2B starter kit
-tablet
I think I have it all but assurance would be nice, Thanks!
Most people use the phidgets 24v motor with a 12v to 24v converter. There are 12v options though.
Dont forget connector for WAS. (This is for rqh100030)
Phidgets 3269 is 24v, search for 12v motor something like this, if you want 12v.
And make sure you got at least 2 usb ports on tablet. If not get usb hub or usb hub with ethernet if you plan on udp. Buy new usb cables to minimize chances of disconnection because of worn out cable.
And that should be enough for autosteer.
hi I´m building almost exactly the same setup, about coding of arduinos, do i need to write code myself, or is it plug and play with the “autosteer_UPD_V5” from Briantee?
And for GPS I´m planning on “ardusimpleRTK2B” on arduino uno, with ethernet shield, and RTK corrections from base, over tablet internet, does the ardusimple communicate with tablet through arduino? or do i need a xbee module?