Hello,
So Im building my first agopengps project. I am in Ontario, Canada and have been following for a few years and am hoping to finally complete a project. So currently Im building my own base using raspberry pi 3b and f9p for ntrip corrections. Also I am using a standard ampseal all in 1 pcb and I think Im going to go with a hydraulic valve. I would also like to do some things with machine control udp and am wondering what the best way to go about it is?
Would like to use 3 raise commands, 3 lower commands and control 4 section with the ability to do rate control in the future. What hardware do I need to do this? Where do you suggest getting it?
Hello ipeel8. I’m in Ontario too, near London. Are you nearby? I’m also using a pi/f9p for base and also using all in one ampseal boards, but all with micro F9P instead of standard F9P.
Can you clarify what you mean by 3 raise commands, 3 lower commands? Is your tractor pulling/pushing 3 implements and you need each implement to raise/lower individually?
You’ll want to decide how you are going to distribute the control system. Do you want to mount section control modules on the tractor or do you want to mount them on the implement? Either setup can make sense. If you want to do both section control as well as rate control then I think it makes sense to combine those onto a single PCB and mount it on the implement. Have a machine control PCB mounted on the tractor in order to control the raise/lower.
Personally this is my first year building a system. I’m getting tractors steering for a season before I expand to raise/lower/section/rate. I’m already overwhelmed by just getting them steering.
Hello WildBuckwheat,
Thanks for the response. I am Listowel area, so a couple hours away from London.
To clarify project 1 tractor is pulling a planter. Would like it to raise and lower frame of main planter, raise and lower right marker, and raise and lower left marker. As well as control 4 sections. I understand that markers would become obsolete with rtk autosteer but would still use them until i am confident in the system and if they were automatically controlled that would be great. Project 2. section control/ rate control for a self-propelled fertilizer airflow.
I agree that the machine control things should stay with the tractor because then it could be used with a different implement while section/rate control stay with implement.
Unfortunately, I am still very confused about what I need. Is the Teensy from the all in 1 PCB able to do a few lift/ raises and then where are the wires coming off the all in 1 pcb to make this happen. With the section/rate control I am unclear about the PCB. Do i need another Teensy, or an arduino Nano? and how do I add ethernet or is there board to order from JLC. I see that you provided me some links but I have been unable to find what I’m looking for within. If you could break it down with more direction that would be greatly appreciated. Sorry if my reply sounds stupid, but Im lost and a little overwhelmed.
Computationally wise the Teensy from the all in one (AOI) board is easily able to handle a few lift/raises and section control and rate control.
Hardware wise the AIO PCB has I believe three spare teensy pins broken out to the ampseal connector. The AIO PCB also has 2 canbus chips. What model tractor are you planning for? Would your tractor’s hydraulic up/down control be by canbus or by wire?
Programming wise I don’t believe the AIO teensy code is currently setup for lift/lower control. That might change by spring.
I’d suggest that it won’t take you very long to gain confidence in the system and to forget about the automatic marker control, but it’s up to you.
So your left and right markers are completely independent and plumbed to different SCV’s? I don’t believe that AOG was designed for marker control like that. You could do some additional relay wiring or add a few lines of code to make it work, it would simply alternate left/right marker each time it receives a raise/lower signal, and it might get out of sequence sometimes. This greatly simplifies things though, because both markers would be triggered from a single signal and that same signal could do the frame raise/lower. So now you’re down to a single raise/lower control.
What would be easier is if your markers had a hydraulic sequencing valve, and what would be even easier is if the marker hydraulic sequencing valve was tee’d into your frame raise/lower. Don’t suppose you have those parts lying around?
You’ll need another board for rate/section control and that board will have an arduino or teensy. Some of the boards connect to the computer with USB, and other boards connect with Ethernet.
Do you need AgOpenGPS to do rate control? Rate control doesn’t really have anything to do with GPS unless you want to do variable rate prescriptions, and that’s kind of on the cutting edge of what AgOpenGPS can do.
Section control is way more supported, there are plenty of boards that can do section control. I think you would have a lot easier time keeping your existing rate controller and tying in section control. Not sure if your spreader supports that.
Hydraulics would be controlled via wires/ relay etc. Not canbus
Yes the markers are each on their own hydraulic remote. As for markers, they can be continued to run manually or not used etc. If the software isnt fully developed yet I dont need to head down a path creating more confusion/ complications. Advantages to still using markers are when having other people run equipment they can see obviously if something is wrong.
With section control is there an advantage to using a teensy over a nano? Are there code for both? Do they use the same code or im assuming different? What is the agopengps community supporting in the future for machine control? I would also want to do it via ethernet. Is there an available pcb to do it neatly or are wires just being soldered to pins to get the job done? For the time being I would keep my current rate controller and just use agopengps for section control, but definetly would like to plan on having the hardware to do variable rates in the future if the software was developed.
Most are using nano and Ethernet adapter. Check out the Support folder in GitHub. I had to alter sketch to get more than 3 sections. Not sure if that’s normal. Teensy will get you panda for auto steer. Use a nano for section control is my plan.
Hey Kevin,
So you are using the Machine usb project and then just adapting the usb output to ethernet? If that is the case I think I can follow. I guess I thought there may have been something else developed to go straight from the nano to the tablet using ethernet?
Hi fellow Ontarians, I am in Middle eastern Ontario, just diving into Agopengps but I have been tinkering with electronics and software for quite a while. I have a base set up on rtk2go already, under “Crewsfarm” using a sparkfun F9P and SNIP.
Is there a good place to go to find out what the heck panda is and how it works? Can one use teensy, and connect it via USB, or must you go Ethernet at that point?
Panda is about synchronising position (GPS) and acceleration (IMU) data. (when your tractor hangs to the side because of uneven soil, the GPS position may need to be corrected) A separate Panda board with a Teensy controller takes care of this and send one combined $PANDA message to AOG. New AllInOne PCB’s have this function integrated. Ethernet/UDP is the direction we are going. When you are building now, I would not aim for USB.
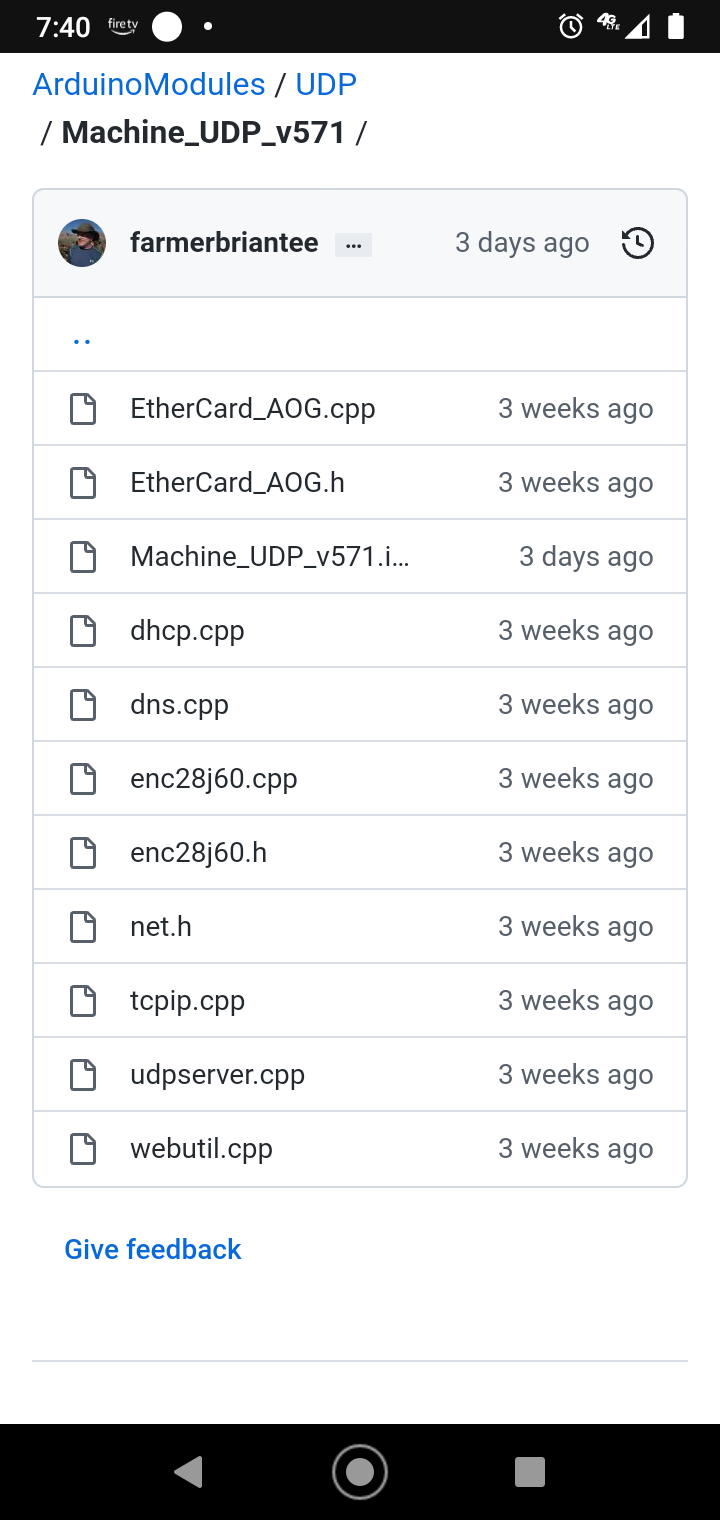
Hey Kevin, thanks for the reply. Your project looks very good. Wondering if you could give me some more guidance on how to find instructions for a project very similar to your own. I currently can’t find any information about machine control using udp in the support folder. I went agopengps_ boards/support/arduinomodules/udp/machine_udp_v571. But am not coming up with anything. If you could guide me in the right direction that would greatly be appreciated.
Also, you are using a nano, breakout board, relay board, toggle switch and Ethernet adapter? Wondering what Ethernet adapter you are using to support Sketch? Also is the nano/ and relay board 3v? What are you using to convert to that?
Sorry if my questions seem dumb. I feel like I’m just making a wrong turn somewhere and can’t figure out how to get going the right way.
Hey Crewsfarm,
Welcome to the thread. Glad there is other Ontarioians here. I am in the North western part of southern Ontario. Let me know if I can help with anything. My advice is to not read anything more than like a year old from the platform. Software/hardware seem to both have dramatically changed in the last year or so and info before then will tend to be inaccurate and lead to more confusion. My quick suggestions are to use the wiki from GitHub. As well, as try and use the hardware that is most current. Ie teensy, f9p, udp, all in 1 pcb. There is a lot more support if you are following the main stream project.
I ordered a teensy and a BNO085 from Adafruit over the weekend, Anxiously awaiting their arrival. I am (Slightly) annoyed at the “AIO” approach that seems to be the default way most people are steered[pun unnoticed until the edit] *Though I do understand why this is the tendency
It seems both an unnecessary barrier, and overkill from a hardware perspective, to ask someone just starting out to order a PCB from China that contains provisions for a bunch of hardware they may not use.
NO OFFENSE INTENDED.
Like I said, I understand the “Build once and you’re done” idea of the AIO PCB, and the increased reliability of having no loose wires, etc. It also seems to me it has come a long way from the idea of plugging some stuff into an arduino and having a functioning guidance system.
Off-topic: Why does the IMU-GPS fusion which seems to be called PANDA, have to be done on the microcontroller at all? Seems to me that the processor in the windows computer should be able to do such math faster. Or is it because the serial port drivers in windows have unknown delay in them? (perhaps I will find this on the forum myself looking into the history of panda, but so far I am not having much luck with the search function)
PANDA is quicker in the Teensy as it’s correlating GPS and heading etc all in-box, no delay in sending to computer, waiting for processing, receiving info back. The measurements all relate to each other (no point getting a heading a second apart from position), so fusing them in as short a time as possible before handing it on.
Hello ipeel8. When you reply, if you click on reply button under users last post. It will be directed to the user and they will get a notification. I believe @ipeel8 will do the same.
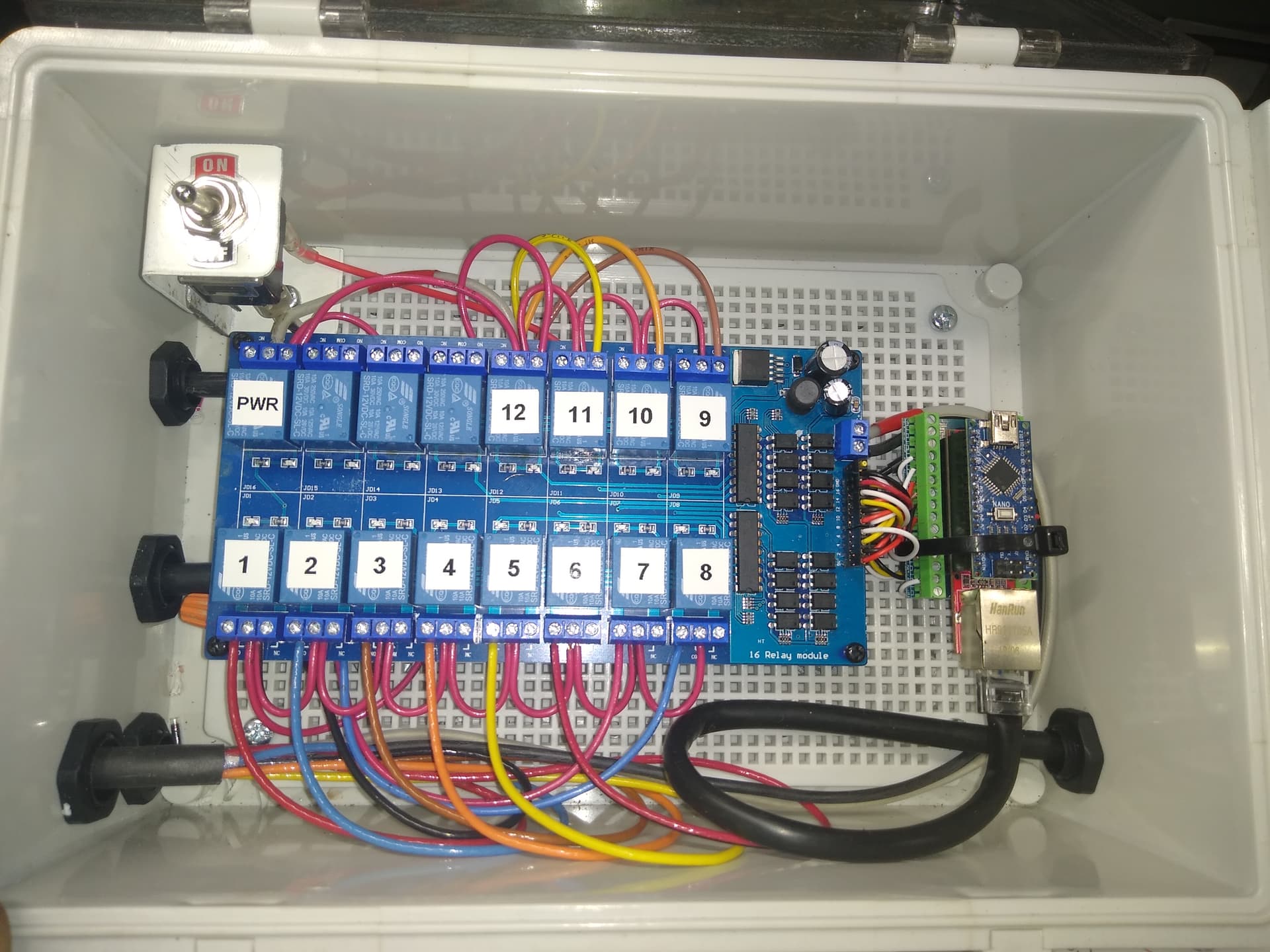
It takes all these files to have complete sketch. I was copying and pasting each file in a new tab. You may know this, but I just found out from Brian. If you download whole support folder. It is much easier. Adapter is enc28j60. It’s one of the files on screenshot. Great adapter! I ordered 2 from eBay and header pins were crazy thin. Almost unusable, Loose connection. Just watch that. If pins are extra long, they are better. I trim them with tin snips. Toggle switch cuts 12v power to relay contacts. The clutches I use are engaged. Power to disengage. This way if having trouble, can always plant.
Edit: sorry you were already to sketch folder. Nano and relay board are 5v. This 16ch relay board has built in 12-5v converter. Pretty nice to set up. I had a little trouble enabling 12 outputs from nano sketch. I was only getting 3 outputs at first. How may sections you have? You have to be careful what pins you use. Adapter uses quite a few.