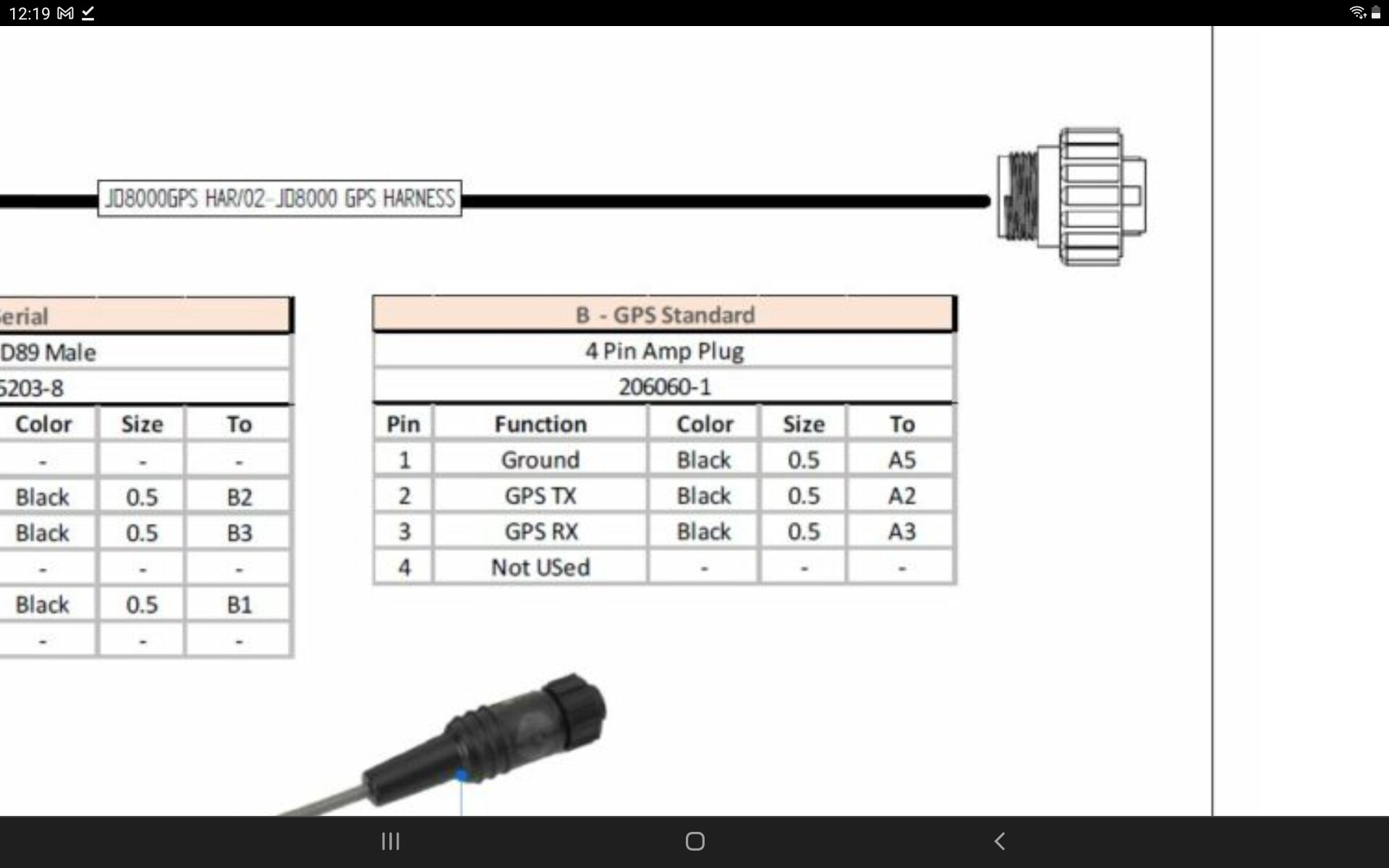
I need to get the corrected GPS signal from AOG or a different component to our 3rd generation Precision Planting monitor which controls electric drives and mapping for us. Any help or direction would be greatly appreciated. I attempted to attach a few pictures of the plug, from what I read it requires
NMEA Strings: Set at 5 HZ
GGA: Time, position and fix type data.
RMC: Time, date, position, course and speed data.
VTG: Course and speed information relative to the ground.
Baud Rate: 19200 or 38400.
I dug through the code and this feature does not yet exist, but is obviously a very important one and ultimately a feature that wouldn’t take too long to implement. Perhaps this can find its way onto the long list of feature requests for AOG.
I can think of several ways to do this.
Clearly AgIO has all the serial port code in it now, so AgIO is the place to send these synthetic NMEA sentences from. However AgIO does not currently see or know the roll corrections that AgOpenGPS is performing.
AgOpenGPS could send all of the necessary information for creating these sentences back to AgIO after performing the roll calculations.
corrected latitude
corrected longitude
IMU-integrated heading
AgIO already knows the date and time of fix, altitude and the speed from the raw NMEA it’s getting from the GPS receiver. AgIO could then generate the corrected GGA, VTG, and RMC messages and send them to a COM port.
I have the exact same scenario. I’m hoping someday AGIO will spit out a nmea string that is corrected for roll, but the only way I know to do it currently, is to wire an RS232 converter directly to the receiver, which works but is not corrected for roll.
This is what I was just looking at for the CANBUS output to ISOBUS. I have the corrected Lat, Lon, Heading etc working but was a a cross road with the time & date message. Do it at the GPS module or make it happen in AgIO was the next decision.
@B_bimmer what is your current AgOpen setup, GPS type / board etc?
I am just getting started so at this point all I have is a bunch of parts ordered. I will be using the standard all in one printed circuit board and basically everything recommended in Brian’s introductory page. I was hoping to use this for steering with one of the hydraulic valves, and of course good corrections for the planter.
I am used to using trimble’s rangepoint RTX service which only claims an accuracy within a foot or so. Obviously corrected for roll the agopengps system would be vastly superior, but if nothing gets done to make that an option would it be possible to split the gps signal right off the simpleRTK2B board and send it to my 20/20? Would the settings I mentioned in my first post be available on that board and accepted by agopengps?
The only issue is you would have to make sure the baud rate off of uart2 on the f9p is set to whatever your 20/20 requires. And that it’s sending the messages required and at the right rate. If the 20/20 requires 5hz (and aog 10hz) the base rate can be 10 Hz and then on the messages going to uart2 can select a rate of “2” which would limit uart2 to 5hz (half the rate of the messages going to uart1). Hope that makes sense. This would be set in ucenter.
Has any progress been made on being able to send out roll corrected NMEA? Going to be running a 2020 GEN 3 for rate and swath control this year. But still steering with AOG dual. Any help would be appreciated
I am just getting started in AOG and just ordered the AiO 4.5 standard boards today!! so bear with me if I’m mistaken, but if you ordered the simpleRTK3B heading model with dual antenna on the same board and the appropriate XBee plugin for it, would it send roll corrected NMEA to a 2020?
No. I believe it’s similar to the F9P in heading mode. You get the GGA position of the first antenna, and then a bearing and pitch or roll angle from the first antenna pointing towards the second antenna. Besides that, the GPS receiver has no idea the height of the antenna above the axle, or any of the offsets, so it can’t actually correct with roll. Still needs AOG to do that, since AOG knows the offsets.
PP does see the RMC / GGA / VTG messages at 5Hz (38400 baud rate)
However it doesn’t want to go further.
I’m in touch with Precision Planting, early next week we should get an update from the developers.
We asked the local John Deere dealership if they could show the monitor capable to work via another machine but they couldn’t.
Turns out the decimal separator became a , instead of a . Monday we’ll try again.
Just to follow up a bit on GPS out with 20/20. I did use with success, but not the one included in AOG 6.2. I used a version from SK21. But yes it worked fine. Only a couple things wern’t ideal. I had to disconnect gps out before shutting down tractor or gps out would lock up. Also it would be nice if GPS out would auto connect on AOG startup. otherwise its great, thanks to all who contributed. Plan to try latest version in 6.3 when i use the planter in a week or two.